о
О)
ел ю
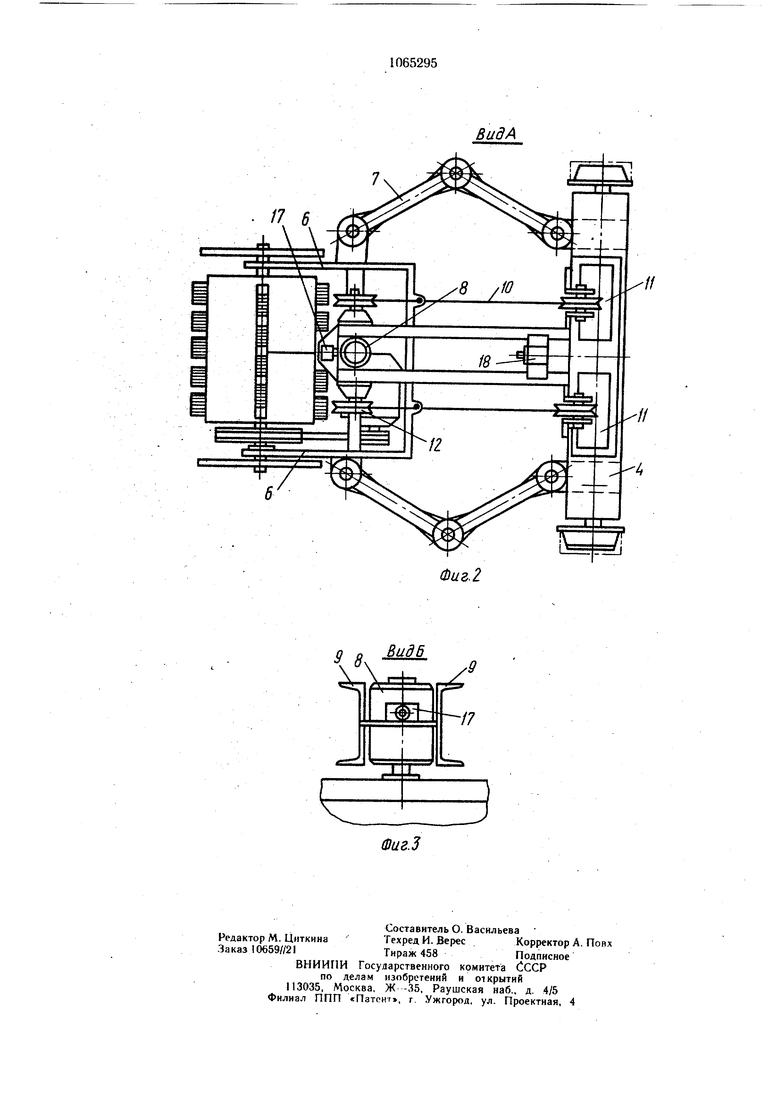
со ел Изобретение относится к судостроению, в частности к устройствам для очистки корпуса судна в доке. Известен манипулятор для очистки корпуса судна 6 доке, содержащий самоходную тележку, на которой, шарнирно закреплена стрела с приводом наклона, а также установленную на стреле с возможностью перемещения вдоль нее каретку с приводом перемещения, на которой посредством узла крепления установлена рабочая головка II). Однако известное устройство не обеспечивает возможности применения широкозахватного рабочего органа, позволяющего отслеживать изменение кривизны обрабатываемой поверхности судна как в поперечном, так и в продольном направлении. Целью изобретення является улучшение эксплуатационных характеристик манипулятора.. Для достижения указанной цели и манипуляторе для очистки корпуса судна в доке, содержащем самоходную тележку, на которой шарнирно закреплена стрела с приводом намона, а также установленную на стреле с возможностью перемещения вдоль нее каретку с приводом перемещения, на Которой Посредством узла крепления установлена рабочая головка, узел крепления рабочей головки к каретке включает две пары атарнирно соединенных рычагов, связанных с кареткой, а также закрепленный на рабоч ей головке ролик, а каретка снабжс;на верхней и нижней траверсами с закрепленным и на них onopHbfMH блоками, а также системой противовесов, подвешенных а канатах, запасовапных в указанные блоки, причем верхняя траверса выполнена в виде направляющей, в которой установлен упомянутый ролик рабочей головки, а нижняя траверса снабжена шарнирно закрепленной на ней одним концом поворотной рамкой, другой конец которой связан с кареткой посредством приводного механизма, при этом один из противовесов, связанный канатом с нижней частью рабочей головки, установлен в поворотной рамке, а другой, связанный с верхней частью рабочей головки, установлен с возможностью перемещения вдоль стрелы. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. I. Манипулятор содержит самоходную тележку 1, на кЬторой шарнирно закреплена стрела 2 с приводом наклона 3. В направляющих стрелы 2 размещена каретка 4, перемещение которой осуществляется- посред-, ТГтвом привода перемещения, выполненного в виде лебедки 5. На каретке 4 установлена рабочая головка 6 посредством узла креплення, включающего две пары шарнирно сое рычагов 7, связанных с кареТкой, а также закрепленный на рабочей головке ролик 8, перемещающийся в направляющих верхней траверсы 9 каретки 4. К рабочей fj-оловке 6 на.канатах 10 подвешены проти|овесь1 П. Опорные блоки 12 закреплены на | йерхней траверсе 9. Нижняя траверса13 кареткн 4 содержит закрепленную шарнирно рамку 14, внутри которой размещен компенсирующий противовес 15 в виде тележки, связанный канатом с нижней частью рабочей головки 6. На раме каретки 4 Находится приводной механизм 16 наклона рамки 14. На траверсе 9 установлены датчики 17 и 18 перемещения рабочей головки 6. На направляющей механизма 3 установлены датчики 19 и 20 наклона стрелы. Работа манипулятора может осуществляться как по командам оператора, так и в автоматическом копирующем режиме. Манипулятор обеспечивает обработку корпуса судна вертикальным перемещением каретки с рабочей головкой с последующим шаговым перемещением манипулятора вдоль корпуS3 судна. При обработке вертикальной полосы самоходная тележка 1 наезжает на борт судна до упора рабочей головки 6 в обрабатываемую поверхность. При этом ролик 8 отходит от датчика 17, давая сигнал для включения лебедки 5, которая перемещает каретку 4 в вертикальном направлении. Рабочая головка 6, копируя поверхность, поворачивается относительно ролика 8 или утапливается. При изменении погиби поверхности рабочая головка возвращается в исходное положение противовесами П.. Эти же. противовесы обеспечивают постоянное поджатие рабочей головки 6 к обрабатываемой поверхности. В случае предельного утапливания рабочей головки 6 ролик 8 нажимает на датчик 18, который дает сигнал на изменение угла наклона стрелы 2. При отклонении стрелы 2 на угол о( одновременно приводным механизмом 16 отклоняется на угол рамка 14 с компенсирующим противовесом 15. При этом угол наклона рамки составляет о( + и компенсирующий груз уравновешивает составляющую веса рабочей головки 6. При достижении предельного угла наклона стрелы 2 включается датчик 20, подающий сигнал на отход самоходной тележки от борта с одновременным возвращением стрелы в исходное вертикальное положение, фиксируемое датчиком 19. Такое выполнение манипулятора обеспечивает возможность применения широкозахватного рабочего органа, позволяющего отслеживать изменение кривизны обрабатываемой поверхности судна как в поперечном, так и в продольном направлении, что значительнд улучшает эксплуатационные характеристики манипулятора.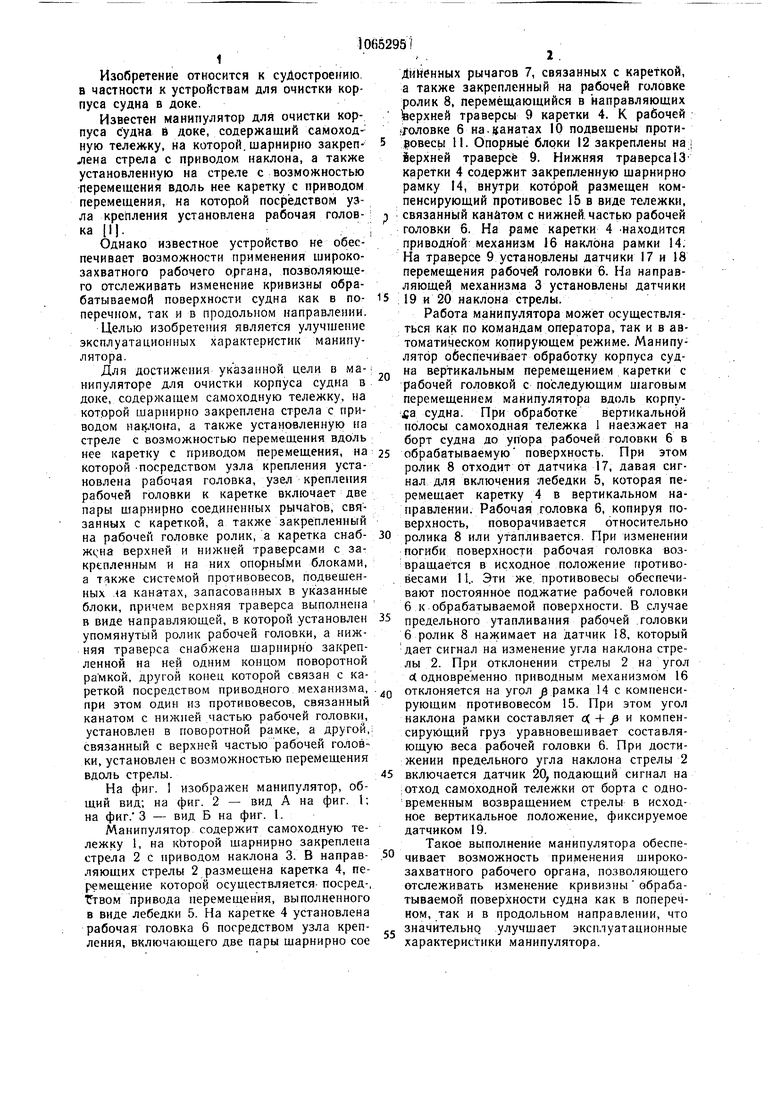
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки корпуса судна в доке | 1983 |
|
SU1105387A1 |
| Устройство для обработки корпуса судна в доке | 1982 |
|
SU1039803A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| СКЛАДНОЙ БАШЕННЫЙ КРАН | 2023 |
|
RU2817662C1 |
| Манипулятор для очистки и окраски корпусов судов | 1978 |
|
SU789320A1 |
| Устройство для сборки балок набора с обшивкой корпуса судна | 1982 |
|
SU1011442A1 |
| Устройство для передачи людей и грузов в море с обслуживающей платформы на судно | 1981 |
|
SU954320A1 |
| Устройство для очистки корпуса судна | 1988 |
|
SU1565748A1 |
| Днищевая очистная машина | 1987 |
|
SU1558767A1 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2006 |
|
RU2320529C1 |

МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ КОРПУСА СУДНА В ДОКЕ, содержащий самоходную тележку, на которой шарнирно закреплена стрела с приводом наклона, а также установленную на стреле с возможностью перемещения вдоль нее каретку с приводом перемещения, на которой посредством узла крепления установлена рабочая головка, отличающийся тем, что, с целью улучшения его эксплуатационных характеристик, узел крепления рабочей головки к каретке включает две пары шарнирно соединенных рычагов, связанных с кареткой, а также закрепленный на рабочей головке ролик, а каретка снабжена верхней и нижней траверсами с закрепленными на них опорными блоками, а также системой противовесов, подвешенных на канатах, запасованных в указанные блоки, причем верхняя траверса выполнена в виде направляющей, в которой установлен упомянутый ролик рабочей головки, а нижняя траверса снабжйН шарнирно закрепленной на ней одним концом поворотной рамкой, другой конец которой связан с кареткой посредством приводного механизма, при этом одни из противовесов, связанный канатом с нижней чаi стью рабочей головки, установлен в, поворотной рамке, а другой, связанный ве рхней частью рабочей головки, установлен с возможностью перемещения вдоль стрелы.
д а Видб
/
Х
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
