о а эо
Изобретение относится к механизации и автоматизации различных технологических процессов и предназначено для сборки и разборки пакетов пресс-форм алмазных инструментов различных размеров, требующих мягкой фиксации деталей по периферии алмазоносной части и точной ориентации путем центрирования деталей.
Известен схват промышленного робота, содержащий силовой цилиндр, приводные губки, кинематически связанные между собой зубчато-реечной передачей с двумя рейками и амортизирующим устройством til.
Схват снабжен упругим элементом, расположенным между губками, а каждая губка установлена на одной из реек с возможностью регулировки ее положения на этой рейке.
Недостатком известного устройства является то, что губки схвата могут быть причиной хрупкого разрушения периферии спрессрванной заготовки. имеет место в случае с прессовками алмазных инструментов, периферийный слой которых, изготавливаемый методом порошковой металлургии, является очень хрупким до обжигания спекания.
Целью изобретения является повышение надежности транспортировки деталей за счет снижения динамических нагрузок в момент зажима.
Для достижения указанной цели в предлагаемом схвате промышленного робота, содержащем силовой цилиндр, губки, кинематически связанные между собой зубчато-реечной передачей с двумя рейками и амортизирующим устройством, зубчйто-реечная передача выполнена в виде сблокированных на одной оси большого и малого зубчатых колес, а рейки ее выполнены ступенчатыми с возможностью взаимодействия каждой ступени с одним из зубчатых колес, при этом зубчато-реечная передача снабжена дополнительной рейкой, а амортизирующее устройство выполнено в виде насоса и эластичных элементов, установленных на губках, приче дополнительная рейка жестко связана с поршнем силового цилиндра и с поршнем насоса и взаимодействует с большим зубчатым колесом зубчатореечной передачи, а полости эластичных элементов связаны гибкими шлангми с рабочей полостью насоса.
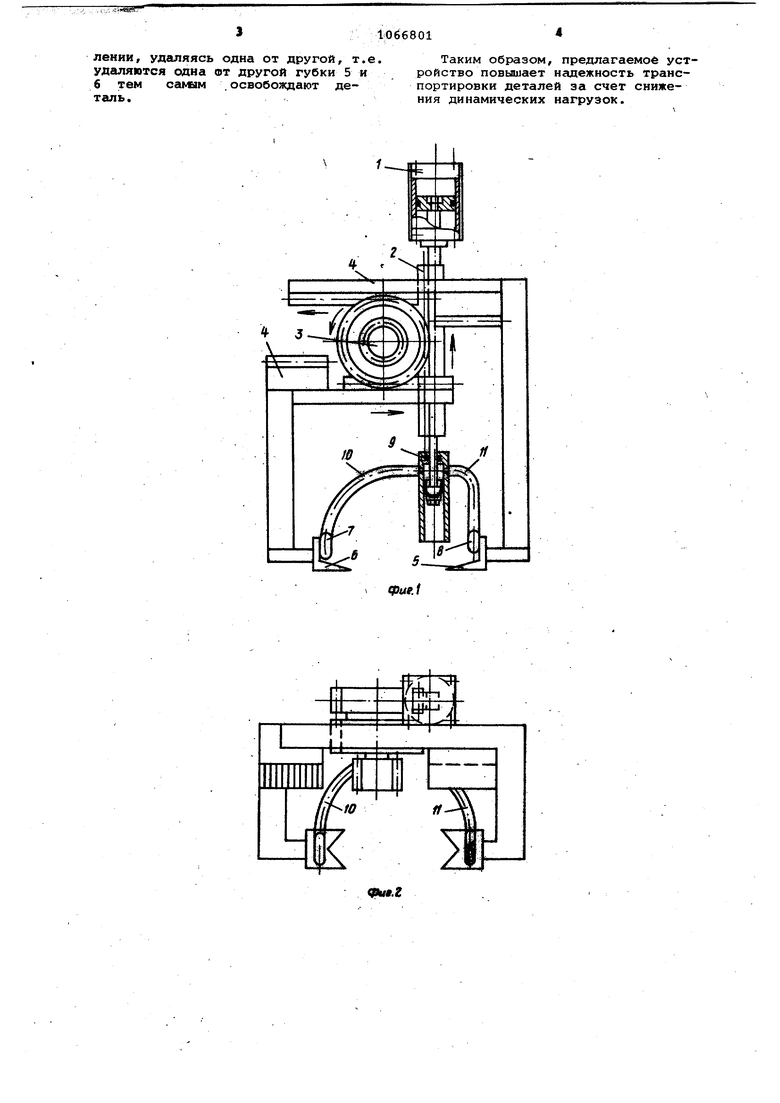
На фиг. 1 изображен предлагаемый схват промышленного робота, на фиг. 2 - то же, вид сверху, на фиг. 3 - то же, вид сбоку.
Устройство состоит из пневматического (или гидравлического) цилиндра 1, сообщающего возвратнопоступательное движение рейке 2,
от которой приходит во вращение сблокированное зубчатое колесо 3, сообщающее возвратно-поступательное движение рейкам 4, несущим на себе правую 5 и левую 6 губки, 5 снабженные амортизационными элементами 7 и 8, упругость которых регулируется посредством насоса 9. Объем рабочей.полости насоса равен сумме рабочих, объемов эластичных
0 элементов 7 и 8. Насос 9 сообщается с амортизационными элементами 7 и 8 посредством шлангов 10 и 11. Устройство работает следующим образом. .
5 В исходном положении поршень
пневматического (или гидравлического) цилиндра 1 находится в нижнем положении, а схват раскрыт. При движении пораиня цилиндра 1 вверх переQ мещается вверх связанная с поршнем зубчатая приводная рейка 2, заставляя вращаться против часовой стрелки сблокированное зубчатое колесо 3, состоящее из большого и малого
5 колес, установленных на одной оси, и сообщая при этом поступательное дв 1жение навстречу одна другой связанным с ним ступенчатым зубчатым рейкам 4, и начинают сближаться
Q губки 5 и 6 j смонтированные на рейках 4.
По мере сближения губок 5 и б к зажимаемой детали первые ступени
5 реек 4 выходят из зацепления с большим зубчатым колесом сблокированного зубчатого колеса 3 и одновременно входят следующие их ступени в зацепление с меньшим колесом сбло0 кированногр зубчатого колеса 3, в результате чего скорость движения реек 4 замедляется и губки 5 и 6 медленно приближаются к зажимаемой детали. При этом поршень
с насоса 9, связанный с приводной рейкой 2, также движется вверх, вытесняя воздух Из 4 абочего объема насоса 9 и подавая его по шлангам 10 и 11 в рабочие полости эластичных элементов 7 и 8, смонтированных на обращенных к .зажимаемой делг
тали сторонах губок 5 и 6. Эластичные элементы 7 и 8 входят в контакт с деталью, мягко центрируя ее; а затем губки 5 и б окончательно 5 фиксируют деталь.
Для раскрытия охвата и освобождения зажатой детали изменяется по команде направление движения
0 поршня цилиндра 1. Связанная с ним приводная рейка 2 движется вниз, заставляя вращаться по часовой стрелке зубчатое колесо 3. Связанные с зубчатым колесом 3 рейки 4
5 двигаются в противоположном направлении, удгшяясь одна от другой, т.е. удаляются одна от другой губки 5 и 6 тем сакам .освобождают деталь.
Таким образом, предлагаемое устройство повышает надежность транспортировки деталей за счет снижения динамических нагрузок.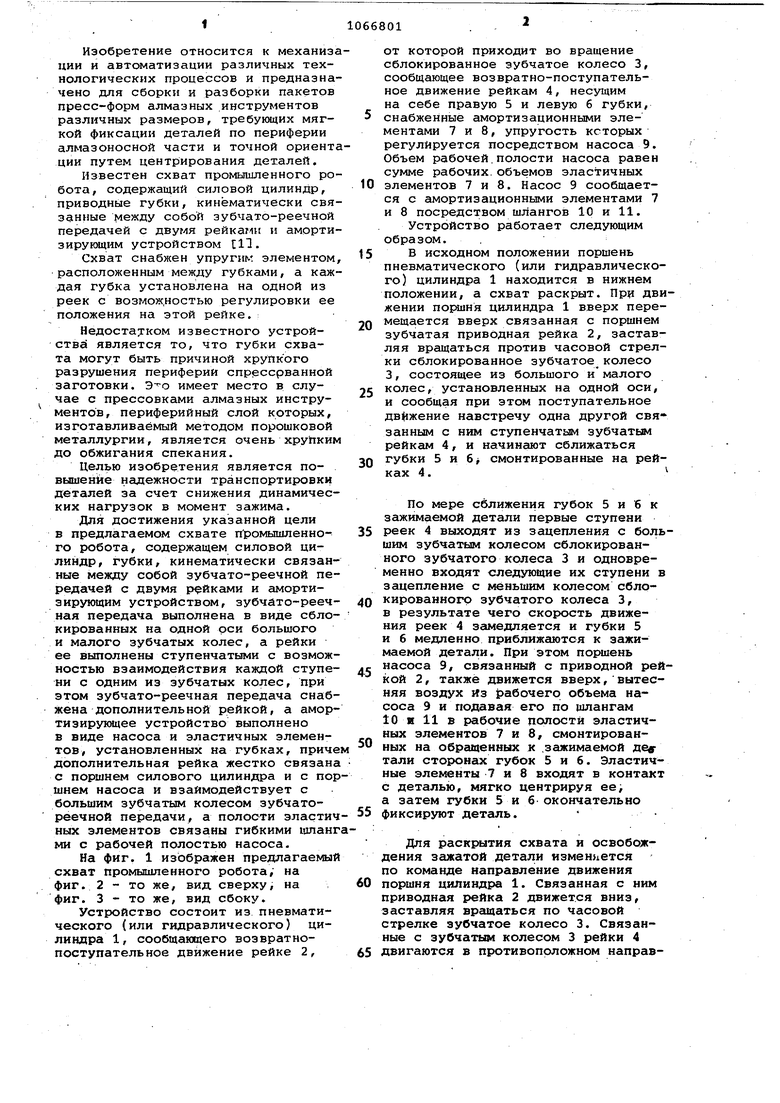
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват промышленного робота | 1977 |
|
SU638462A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Манипулятор | 1979 |
|
SU823118A1 |
| Схват манипулятора | 1978 |
|
SU703323A1 |

СХВАТ ПРОМЫШЛЕННОГО РОБОТА, содержащий силовой цилинда, губ-г ки, кинематически связанные между собой зубчато-реечной передачей с двумя рейками и амортизирующим устройством, отличающийся тем, что, с целью повышения нещежности за счет снижения динамических нагрузок в момент захвата детали, зубчато-реечная передача выполнена в виде сблокированных на одной оси большого и малого зубчатых колес, а ее рейки выполнены ступенчатыми и расположены с возможность взаимодействия каждой птупейи с одним из зубчатых колес, при этом зубчатореечная передача снабжена дополнительной рейкой, а амортизирукицее устройство выполнено в виде насоса и зластичных элементов, установленных на губках, причем дополнительная рейка жестко связана с порш- С нем силового цилиндра и поряпнем насоса и взаимодейстЕ/ет с большим (Л зубчатым колесе зубчато-реечной передачи, а полости эластичных элементов связаны с рабочей полостью насоса.
| Схват промышленного робота | 1977 |
|
SU638462A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
