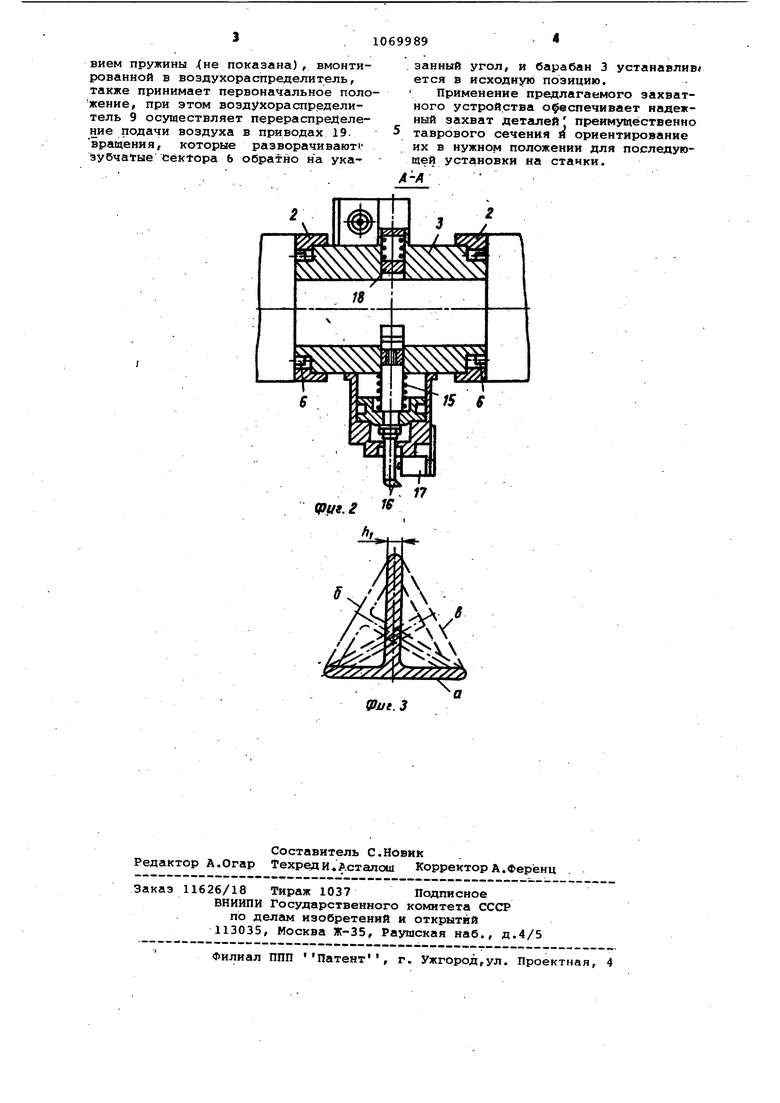
Изобретение относится к роботостроению, в частности к .заг ватным .органам промышленных роботов и мани туляторов, и предназначено для захвата детелей преимущественно тавро вого сечения. Известно захватное устройство для деталей типа рельсов, содержащее корпус с закрепленными подвижны и йеподвижным згшимами.Блок згшимов установлен на вращающемся валу корпуса и приводится в действие гйдрав |лическим ПРИВОДОМ l. Однако извест.ное устройство не может самостоятельно определить положение детали в пространстве и осуществить ее ориентацию, что необходимо при захвате детали и дальнейшей передаче ее непосредственно на позицию станка в заданном положе нии. цель изобретения - расширение технологических возможностей захват .ного устройства путем обеспечения ориентации деталей преимущественно таврового сечения; Поставленная цель достигается тем, что захватное устройство, содержащее корпус, в направляющих . которого размещен блок зажимов,, оди из которых свящан с силовым цилиндром, причем блок зажимов кинематй ески связан с приводом в защения, пневматически cвязaнны, с воздухораспреде лителями, снабжейо закрепленными на блоке зажимов по крайней мере двумя распознакедими шупами в виде рычагов,, кинематически связанных с воздухораспределителями, при этом блок зажимов выполнен в виде барабана С-образного сечения с диаметрально расположенными окнами, в одном из которых размещен зажим, связанный с силовым цилиндром, а в другом - рычаги с возможностью взаимодействия с деталью. На фиг. изображено захватное устройство, общий вид; на фиг. 2 разрез А-А на фиг. 1; на. фиг. 3 контур сечения детали. Захватное устройство содержит корпус 1, в направляющих 2 которого установлен блок зажимов, выполненный в виде барабана 3 С-образного сечения с диаметрально расположенны ми окнами 4 и 5. На торцах барабана жестко закреплены два зубчатых сектора 6. В окне 4 барабана 3 располо жены распознающие шупы, выполненны в виде рычагов 7 и 8, кинематически связанных с воздухпоаспределителями 9 и 10 .Расстояние h между рабочими поверхностями рыча1 ов 7 и 8 выбира ют несколько большим толщины детали. В окне 5 барабана 3 устано лен подвижный зажим 11, связанный с силовым цилиндром 12, на што°ке 1 которого закре плены поршень 14 и возвратная пружина 15, а такясе упор 16, взаимодействующий с датчиком 17. На барабане 3 находится подпружинен ный зажим 18. .С обеих сторон корпус 1 расположены приводы19 вращения, связанные пневматически, с возду хЪраспределителями 9 и 10 и кинематически с зубчатыми секторами 6. Приводы 19 вращения снабжены флажками .20, взаимодействующими с бесконтакт- ными датчиками 21 Захватное устройство работает следующим образом. . На позиции захвата деталь может находиться в трех возможных положениях (фиг. 3). Положение а является необходимым для захвата детали; положеиия .6 и е требуют разворота детали до положения с(, что и выполняет механизм поворота. Устройство при положении р| детали работает, следующим обраэом. Рука (не показана)-робота доставляет захватное устройство в зону расположения детали. Из системы уп- . равления подается команда на силовой цилиндр 12, шток 13 которого с помощью зажима 11 поднимает деталь .вверх до соприкосновения ее. с подпружиненным зажимом 18. При этом деталь толщиной h., входит в зазор li между рычагами 7 и 8. Упор 16 воздействует на датчик 17, который выдает сигнал на перенос детали рукой робота на следующую позицию технологического i цикла. Работа устройства- при положении 5 детали, (положение в идентично положений 5 ) проходит следующим образом. В этом случае при подъеме штока 13 силового цилиндра 12 зажим 11 поднимает деталь, которая своей боковой поверхностью воздействует на рычаг 7 и разворачивает его. При этом рычаг 7 взаимодействует с клапаном воздухораспределителя 9, подающего затем воздух в соответствующие полости приводов 19 9ращения, которые, взаимодействуя с зубчатыми секторами 6/ разворачивают барабан 3 вместе с зажатой деталью на тот же угол до положения а детали. После разворота детали флажки 20 взаимодействуют с бесконтактными датчика-, ми 21, вьадающими сигнал на перенос руки с захватным устройством на следующую позицию технологического цикла. После переноса детали роботом и установки ее на позицию последующей обработки из системы управления поступает команда на прекращение подачи воздуха в силевой цилиндр 12 и под действием пружины 15 зажим 11 возвращается в исходное положение, высвобождая деталь. Рычаг 7 воздействием пружины Хне показана), вмонтированной в воздухораспределитель, также принимает первоначальное положение, при этом воздухораспределитель 9 осуществляет перераспределение подачи воздуха в приводах 19. вращения, которые разворачивают зубчатые сектора 6 обратно на ука.занный угол, и барабан 3 устанавлив ется в исходную позицию. :
Применение предлагаемого захватного устройства обеспечивает надежный захват деталей преимущественно 5 таврового сечения и ориентирование их в нужном положении для последующей установки на станки.
А-А 
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1986 |
|
SU1350004A1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| Манипулирующее устройство | 1985 |
|
SU1261792A1 |
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
| Многопозиционное зажимное устройство | 1981 |
|
SU975305A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Захватное устройство | 1984 |
|
SU1248795A1 |
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус, в. направляющих которого размещен блок зажимов, один из которых связан с силовым цилинд-. ром;- причем блок зажимов кинематически связан с приводом вращения, пневматически связанным с воздухораспределителями , отличаю-, щ е е с я тем, что, с целью расширения технологических возможностей путем обеспечения ориентации деталей преимущественно таврового сечения, оно снабжено закрепленными на блоке зажимов по крайней; мере двумя ра спбзнгиощими щупами в виде рычагов, кинематически связанных с воздухораспределителями при этом блок зажимов |ВЫПс)Лнён в виде барабана С -образного сечения с диаметрально расположенными окнами, в одном из которых размещен зажим,, связанный с силовым цилиндром, а в другом - рычаги. § (Л с: а со со оо со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ГИПЕРКОРРЕКЦИИ МУЖСКОГО ПОЛОВОГО ЧЛЕНА | 1999 |
|
RU2175220C2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
