Изобретение относится к машиностроению, в частности к робототехнике, и предназначено для захвата, переноса и установки деталей типа ступенчатых втулок, валиков в патроны станков для технологической их обработки.
Цель изобретения - расширение функдиональных возможностей.
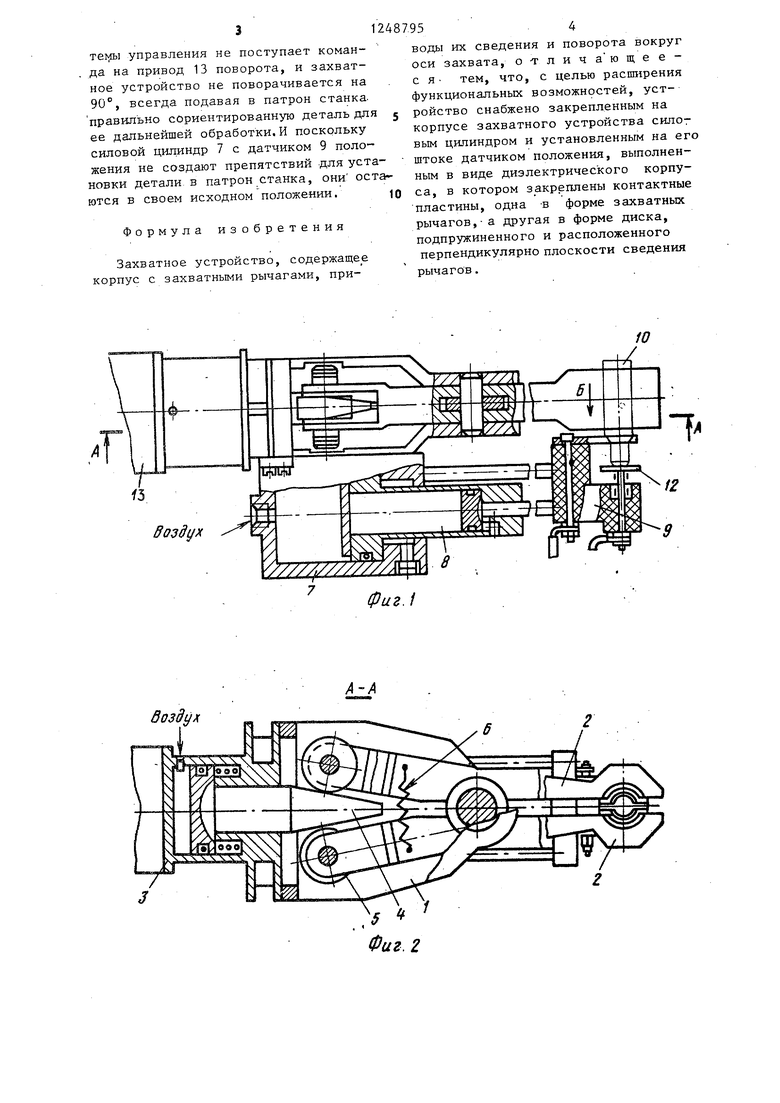
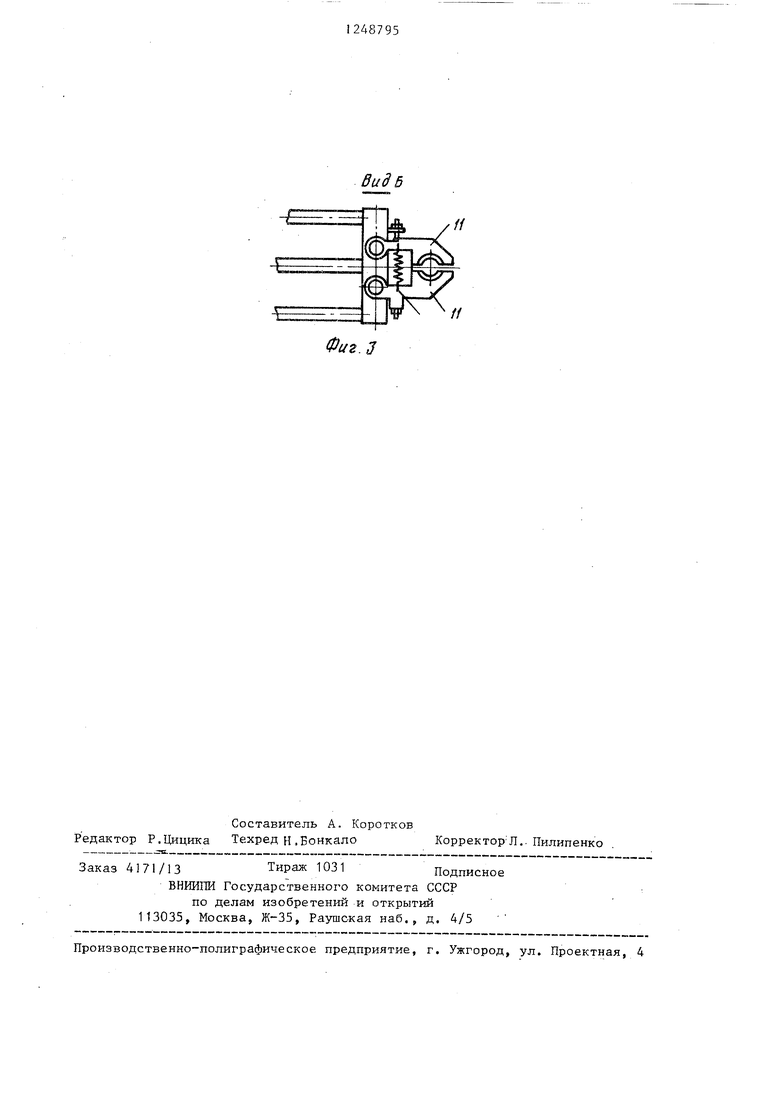
На фиг. 1 изображено захватное устройство, общий вид; на фиг.2 - сечение А-А на фиг. 1, на фиг. 3 - вид Б на фиг. 1.
Захватное устройство содержит корпус 1, захватные рычаги 2 с приводом их сведения, состоящим из пнев- моцилиндра 3 с клином-штоком 4,, взаимодействующим с роликами 5, подпружиненными пружиной 6. К корпусу 1 прикреплен силовой цилиндр 7, на телескопическом штоке 8 которого установлен датчик 9 положения детали 10. Датчик 9 представлен в Е;иде диэлект-,. рического корпуса, в котором закреплены контактные пластины, причем одна пластина выполнена в виде подпружиненных рычагов 11 по форме захватных рычагов 2, а друг.ая в форме диска 12, подпру7киненного и расположенного перпендикулярно плоскости сведения указанных рычагов 2. Внутренний диаметр рычагов 11 устанавливает. ся меньшим диаметром захватных рйчагов 2„ но большим меньшего диаметра детали 10 типа -ступенчатой втулки Захватное устройство снабжено также приводом 13 поворота его вокруг своей продольной оси.
Устройство работает следующим образом.
В исходном положении клин-шток 4 пневмоцилиндра 3 занимает крайнее левое положение, захватные рычаги 2 разведены. Телескопический шток 8 вместе с датчиком 9 положения детали выдвинут таким образом, чтобы обеспечить соосность захватываемой детали 10, рычагов 11 и пластины 12 датчика 9.
При поступлении команды из систе- Miii управления (не показана) робота з.-1хватное устройство доставляется на позицию захвата детали 10, которая из загрузочного устройства подается -в захватные рычаги 2. Их сжатие осуществляется воздействием на них клина-штока 4, который после подачи сжатого воздуха в поршневую полость
12487952
пневмоцилиндра 3 перемещается вправо и раздвигает подпружиненные пружиной 6 ролики 5,
При этом в захватные рычаги 2 из 5 загрузочного устройства деталь 10 ти- па ступенчатой втулки попадает участком большего диаметра вверх, а в патрон станка деталь должна направляться заданной поверхностью, например 10 меньшим диаметром.
В этом случае деталь 10, проходя через подпружиненные рычаги 11 датчика 9, воздействует на вторую контактную пластину датчика - диск 12, 5 так как меньший диаметр детали несколько меньше зева рычагов 1 1.
При зтом замыкается электричес. кая цепь, после чего из системы,уп- ,равления поступает команда на при-.
20 вод 13 поворота, и захватное устройство разворачивается вокруг своей оси на 90 в требуемом направлении, например по часовой стрелке. Одновременно с этим поворотом в штоко25 вую полость,силового цилиндра 7 подается сжатый воздух, под действием которого начинает перемещаться его, ,шток 8, жестко связанньй с датчиком 9, который выводится, штоком 8 из 3030 ны захватных рычагов 2. При этом подпружиненные рычаги 11 легко разжимаются под действием детали 10, зажатой другим концом в захватных рычагах 2. Таким образом, участок
35 детали с меньшим диаметром свободен и подготовлен для установки его в патрон станка после указанного поворота всего захватного устройства вокруг оси.
40 После операции установки детали ,в патрон устройство возвращается в исх;одное положение, и телескопический шток 8 под действием сжатого воздуха, поступившего в пор1лневую
45 полость силового цилиндра 7, вьщви- гается до тех пор, пока не совпадут вертикальные оси захватных рычагов 2 и контактных пластин 11 и 12 датчика 9.
50 Возможен случай, когда несориентированная деталь 10 из загрузочного устройства в захватные рычаги 2 попадает участком с большим диаметром вниз. Поскольку зев рычаго.в 11
gg меньше большего диаметра детали, последняя в зтом случае не взаимодействует с контактной пластиной - диском 12, цепь разомкнута, из сиекая цепь, после чего из системы,уп- равления поступает команда на при-.
вод 13 поворота, и захватное устройство разворачивается вокруг своей оси на 90 в требуемом направлении, например по часовой стрелке. Одновременно с этим поворотом в штоковую полость,силового цилиндра 7 подается сжатый воздух, под действием которого начинает перемещаться его, ,шток 8, жестко связанньй с датчиком 9, который выводится, штоком 8 из 30ны захватных рычагов 2. При этом подпружиненные рычаги 11 легко разжимаются под действием детали 10, зажатой другим концом в захватных рычагах 2. Таким образом, участок
детали с меньшим диаметром свободен и подготовлен для установки его в патрон станка после указанного поворота всего захватного устройства вокруг оси.
После операции установки детали ,в патрон устройство возвращается в исх;одное положение, и телескопический шток 8 под действием сжатого воздуха, поступившего в пор1лневую
полость силового цилиндра 7, вьщви- гается до тех пор, пока не совпадут вертикальные оси захватных рычагов 2 и контактных пластин 11 и 12 датчика 9.
Возможен случай, когда несориентированная деталь 10 из загрузочного устройства в захватные рычаги 2 попадает участком с большим диаметром вниз. Поскольку зев рычаго.в 11
меньше большего диаметра детали, последняя в зтом случае не взаимодействует с контактной пластиной - диском 12, цепь разомкнута, из сиеTei i управления не поступает коман- . да на привод 13 поворота, и захватное устройство не поворачивается на 90, всегда подавая в патрон станка, правильно сориентированную деталь для ее дальнейшей обработки.И поскольку силовой цилиндр 7 с датчиком 9 положения не создают препятствий -для уста- новки детали в патрон станка, они остаются в своем исходном положении.
Формула изобретения
Захватное устройство, содержащее корпус с захватными рычагами, приводы их сведения и поворота вокруг оси захвата, о-тлича ющее- с я- тем, что, с целью расширения функциональных возможностей, устройство снабжено закрепленным на корпусе захватного устройства силот вым цилиндром и установленным на ег штоке датчиком положения, выполненным в виде дизлектрического корпуса, в котором закреплены контактные пластины, одна -в форме захватных рычагов,-а другая в форме диска, подпружиненного и расположенного перпендикулярно плоскости сведения рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство | 1985 |
|
SU1261792A1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Захватное устройство | 1982 |
|
SU1069989A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Многопозиционное зажимное устройство | 1981 |
|
SU975305A1 |
| Захватное устройство промышленного робота | 1987 |
|
SU1426783A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Приспособление к металлообрабатывающим станкам для подачи и съема детали | 1940 |
|
SU61552A1 |
Изобретение позволяет определить положение захватываемой детали в пространстве при необходимости со- ориентировать деталь для подачи в станок в требуемом положении. Устройство содержит корпус с захватными рычагами, привод их сведения и привод поворота захвата вокруг оси, закрепленный на корпусе цилиндр с установленным на его штоке датчиком положения детали в пространстве, при этом датчик выполнен в виде диэлектрического корпуса с закреплен- . ными на нем контактными пластинами;; одна - в форме захватных рычагов, другая - в форме диска. Особенность функционирования захвата заключает- , ся в определении посредством датчика положения захватываемой детали в .- захватных рычагах, причем после срабатывания датчика последний убирается, а деталь устанавливается в требуемое для установки на станок положение. 3 ил. (Л го 4;ib 00 4j СО ел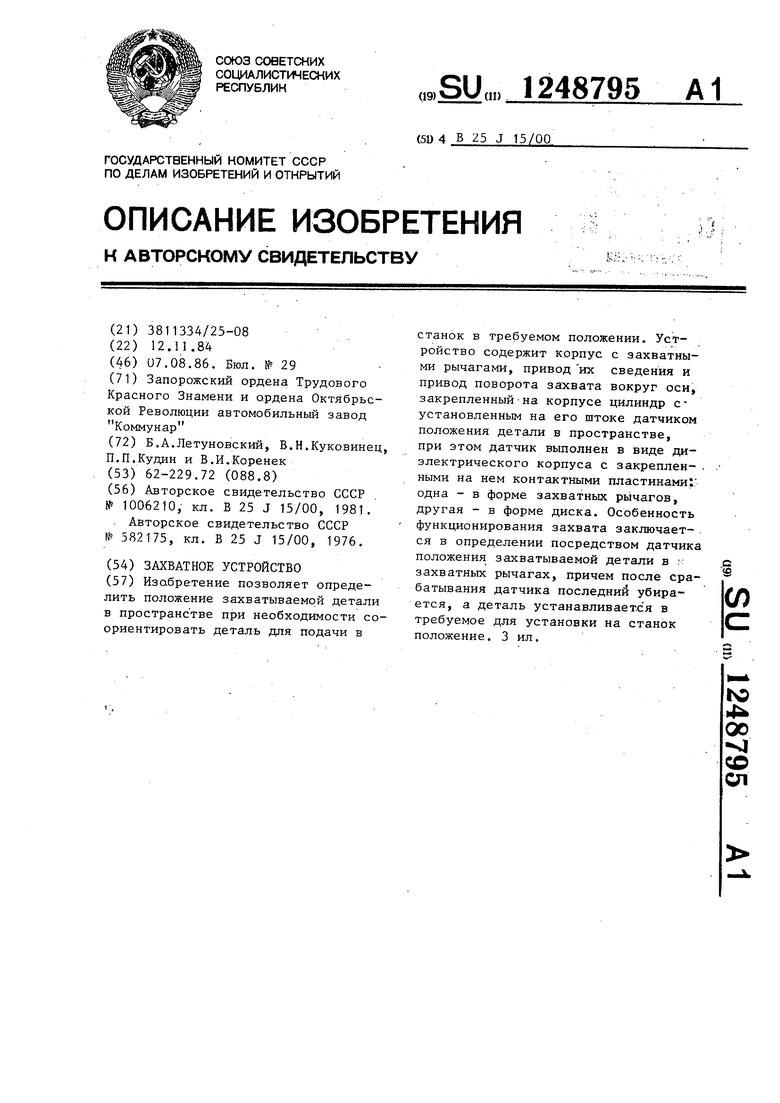
Воздух
Фиг.
Воздух
Фиг. 2
Вид 5
ff
Фиг.З
| Схват промышленного робота | 1981 |
|
SU1006210A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Захват манипулятора | 1976 |
|
SU582175A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
