Изобретение относится к подъемнотранспортному оборудованию, а именно к вакуумным грузозахватным устройствам, и может быть использовано во всех отраслях народного хозяйства для удержания при перемещении вручную горизонтально, наклонно или вертикально расположенных изделий с плоской или криволинейной поверхностью из воздухонепроницаемого материала.
Известен вакуумный захват, содержащий корпус с рукояткой, вакуумобразующую камеру с упругой диафрагмой, закрепленной на подпружиненном щтоке, который установлен подвижно относительно корпуса, и фиксатор вертикального положения щтока 1. ,
Однако в известном захвате все вспомогательные приемы, выполняемые в процессе транспортирования груза, весьма утомительны для рабочего, так как для создания разрежения в вакуумобразующей камере требуется одновременное приложение усилий, затрачиваемых на герметизацию стыка и перемещение щтока с диафрагмой относительно корпуса (последнее усилие создается кистью руки рабочего, что затруднительно), а в процессе разгрузки захвата постоянно заняты две руки рабочего. Все указанное затрудняет процесс обслуживания, вызывает быстрое утомление рабочего и, в конечном счете, ведет к снижению производительности труда.
Цель изобретения - повыщение удобства в эксплуатации.
Поставленная цель достигается тем, что вакуумный захват, содержащий корпус с рукояткой, вакуумобразующую камеру с упругой диафрагмой, закрепленной на подпружиненном щтоке, который установлен подвижно относительно корпуса, и фиксатор вертикального положения щтока, снабжен закрепленными радиально на корпусе одними своими концами изогнутыми упругими стержнями, вторые концы которых размещены над диафрагмой по ее наружному контуру со стороны корпуса.
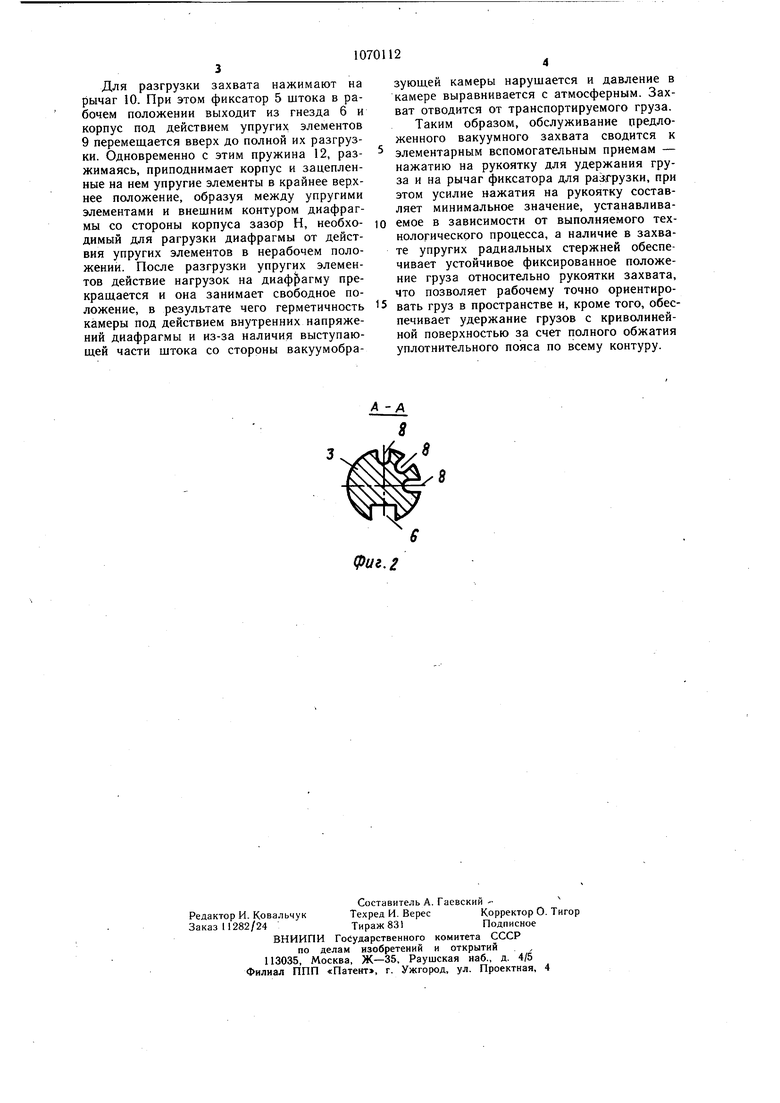
На фиг. 1 изображен вакуумный захват, общий вид; на фиг. 2 - щток , сечение А-А на фиг. 1.
Вакуумный захват имееет корпус 1, соединенный с рукояткой 2, щток 3, соединенный с упругой диафрагмой 4 вакуумобразующей камеры, фиксатор 5 рабочего положения щтока, входящий в зацепление в гнездо 6 щтока 3, фиксатор 7 поворота корпуса относительно штока 3, входящий в зацепление с продольным пазом 8 на щтоке упругие элементы (радиальные изогнутые стержни )9, подпружиненные двуплечие рычаги 10 и 11 для приводов фиксаторов 5 и 7, пружину 12 сжатия.
Вакуумный захват работает следующим образом.
На поверхность транспортируемого груза устанавливают вакуумный захват и производят нажим на рукоятку 2 до ввода фиксатора 5 рабочего положения щтока в гнездо 6 щтока и производят транспортирование груза. Подпружиненный фиксатор 5 входит в зацепление со щтоком автоматически.
При нажатии на рукоятку 2 корпус 1 захвата перемещается вдоль оси щтока 3, сжимая упругие элементы 9 и пружину 12. При этом упругие элементы 9, опираясь на внещнюю поверхность Б диафрагмы вакуумобразующей камеры, герметизируют стык между внутренней поверхностью В диафрагмы и поверхностью транспортируемого груза и накапливают энергию сжатия. Пружина 12 перемещает среднюю часть диафрагмы 4 в крайнее нижнее положение, вытесняя атмосферный воздух из вакуумобразующей камеры, ограниченной диафрагмой и поверхностью транспортируемого груза.
При снятии нагрузки на рукоятку 2 (переходный момент, предществующий подъему захвата с закрепленным грузом) упругие элементы 9 под действием наклонной энергии перемещают корпус 1 и соединенный с ним через фиксатор 5 щток 3 и среднюю часть диафрагмы 4 вверх от поверхности груза. При этом в вакуумобразующей камере создается разрежение воздуха, необходимое для удержания груза при транспортировании.
В зависимости от характера выполняемой технологической операции устанавливают заданное значение разрежения воздуха в вакуумобразующей камере. Для этого фиксатор 7 поворота корпуса относительно щтока устанавливают в один из продольных пазов 8 на щтоке 3, которому соответствует гнездо 6 под фиксатор 5, расположенное в определенном сечении по длине щтока.
Например, если в процессе транспортирования груза не требуется его наклон или перемещение в вертикальную плоскость, то захват настраивают на наиболее легкие условия работы, для чего, нажав на рычаг 11, выводят фиксатор 7 из зацепления с продольным иазом 8 щтока, и поворотом рукоятки 2 устанавливают фиксатор 7 в паз 8, которому соответствует гнездо 6, расположенное в верхнеей части щтока, т. е. в положение, когда для ввода в рабочее положение щтока фиксатором 5 потребуется наименьщее усилие, прикладываемое рабочим к рукоятке. Положение контролируется по указателю, нанесенному на корпусе и торце щтока (не показано).
При более тяжелых условиях работы фиксатор 7 устанавливается в продольный паз, обеспечивающий зацепление фиксатора 5 в крайнем нижнем положении в гнезде 6.
Для разгрузки захвата нажимают на рычаг 10. При этом фиксатор 5 штока в рабочем положении выходит из гнезда 6 и корпус под действием упругих элементов 9 перемещается вверх до полной их разгрузки. Одновременно с этим пружина 12, разжимаясь, приподнимает корпус и зацепленные на нем упругие элементы в крайнее верхнее положение, образуя между упругими элементами и внешним контуром диафрагмы со стороны корпуса зазор Н, необходимый для рагрузки диафрагмы от действия упругих элементов в нерабочем положении. После разгрузки упругих элементов действие нагрузок на диафрагму прекращается и она занимает свободное положение, в результате чего герметичность камеры под действием внутренних напряжений диафрагмы и из-за наличия выступающей части штока со стороны вакуумобразующей камеры нарушается и давление в камере выравнивается с атмосферным. Захват отводится от транспортируемого груза. Таким образом, обслуживание предложенного вакуумного захвата сводится к элементарным вспомогательным приемам - нажатию на рукоятку для удержания груза и на рычаг фиксатора для разгрузки, при этом усилие нажатия на рукоятку составляет минимальное значение, устанавливаемое в зависимости от выполняемого технологического процесса, а наличие в захвате упругих радиальных стержней обеспечивает устойчивое фиксированное положение груза относительно рукоятки захвата, что позволяет рабочему точно ориентировать груз в пространстве и, кроме того, обеспечивает удержание грузов с криволинейной поверхностью за счет полного обжатия уплотнительного пояса по всему контуру.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1984 |
|
SU1152910A2 |
| Вакуумный захват | 1983 |
|
SU1102763A2 |
| Вакуумный захват | 1983 |
|
SU1105438A2 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| Вакуумный захват | 1984 |
|
SU1284930A1 |
| Вакуумный захват | 1982 |
|
SU1054269A1 |
| Вакуумный захват | 1983 |
|
SU1113352A1 |
| Вакуумное грузозахватное устройство | 1989 |
|
SU1676989A1 |
| Вакуумное грузозахватное устройство | 1984 |
|
SU1184786A1 |
| Вакуумное грузозахватное устройство | 1984 |
|
SU1199734A1 |
ВАКУУМНЫЙ ЗАХВАТ, содержащий корпус с рукояткой, вакуумобразующую камеру с упругой диафрагмой, закрепленной на подпружиненном штоке, который установлен подвижно относительно корпуса, и фиксатор вертикального положения штока, отличающийся тем, что, с целью повышения удобства в эксплуатации, он снабжен закрепленными радиально на корпусе одними своими концами изогнутыми упругими стержнями, вторые концы которых размещены над диафрагмой по ее наружному контуру со стороны корпуса. иг 1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вакуумный захват | 1974 |
|
SU590234A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
