Изобретение относится к подъемно-транспортной технике, а именно к вакуумным грузонольемн1 1м устройствам, и предназначено для захвата, подъема и транспортирования нггучных грузов с плоской поверхностью. По основному авт. св. № 1054269, известен вакуумный захват, содержащий полый корпус и эластичную кольцевую диафрагму, разделяющую полость корпуса на две камеры, одна из которых, поддиафрагменная, посредством штуцера соединена с источником вакуума, а другая посредством патрубка и запорного вентиля соединена с полостью щтуцера и имеет упругие в вертикальном направлении элементы. Захват позволяет осуществлять удержание при-подъеме и транспортировании изделий с плоской поверхностью, размер которых больще корпуса захвата, а также малогабаритных изделий, размером меньше основного корпуса 1. Недостаток известного устройства состоит в его ограниченных функциональных возможностях, т. е. он не обеспечивает удержание при подъеме и транспортировании изделий, имеющих центральное сквозное отверстие. Цель изобретения - расширение иоменклатуры захватываемых изделий с центральным отверстием. Поставленная цель достигается тем, что вакуумный захват содержащий полый корпус и эластичную кольцевую диафрагму, разделяющую полость корпуса на две камеры, одна из которых, поддиафрагменная, посредством штуцера соединена с источником вакуума, а другая посредством патрубка и запорного вентиля соединена с полостью шту. цера и имеет упругие в вертикальном направлении элементы, снабжен дополнительным запорным вентилем, при этом периферийная часть поддиафрагменной полости сообщена с источником вакуума через упомянутый вентиль. На чертеже изображен захват в положении для транспортирования груза, имеющего центральные сквозные отверстия, общий вид. Захват состоит из корпуса 1, центрального штуцера 2 и эластичной диафрагмы 3, которая разделяет корпус на рабочую камеру А и вспомогательную камеру Б. Камера б соединена с центральным штуцером 2 каналом 4 через запорный орган 5. Диафрагма 3 изогнута в камеру А с помощью упругих элементов (пружин) 6 так, что она в свободном состоянии выступает за плоскость уплотиительного кольца 7 корпуса 1 и контактирует уплотняющей поверхностью В с транспортируемым грузом 8. В камере А корпуса на участке между уплотнительным ко.чьцом 7 корпуса и уплотняющей поверхностью В диафрагмы 3 выполнен канал 9, сообп1ающий этот участок камеры А с источником вакуума через запорный вентиль 10. В каналах, сообщающих камеру А с источником вакуума, установлены автоматически действующие отсечные клапаны (на чертеже не показаны). Центральный щтуцер 2 сообщен с источником вакуума запорным вентилем 11. Захват работает следующим образом. При транспортировании малогабаритных грузов запорный вентиль 10, сообщающий камеру А на участке между уплотнительным кольцом 7 корпуса 1 и уплотняющей поверхностью В диафрагмы 3 с источником вакуума, закрывают. Камеру Б через запорный орган 5 соединяют с атмосферой, после чего его закрывают, сохраняя находящееся внутри камеры Б атмосферное давление. Устройство накладывают на транспортируемый груз, диафрагма 3 прижимается к поверхности груза пружинами 6. Камеру А соединяют с источником вакуума через центральный щтуцер 2 и запорный вентиль 11. Устройство под действием разности давлений внутри и снаружи части камеры А присасывается к транспортируемому грузу. Разгерметизация устройства (отпуск груза) осуществляется соединением части камеры А через центральный штуцер 2 и запорный вентиль 11 с атмосферой. При последующих циклах работы с малогабаритными грузами запорные органы 5 и 10 остаются закрытыми. При транспортировании крупногабаритных грузов камеру Б через запорный орган 5 соединяют с источником вакуума, для чего открывают запорный орган 5, а полость центрального штуцера 2 со стороны камеры А перекрывают. Центральный штуцер может быть перекрыт, например, с помощью автоматического отсечного клапана (не показан), который закрывается при заданной разности давлений под клапаном и над ним. Диафрагма 3 под действием разности давлений, преодолевая сопротивление пружин 6, перемешается внутрь корпуса 1 и занимает положение выше плоскости опорной поверхности уплотнительного кольца 7 корпуса 1. Запорный орган 5 закрывают, сохраняя находящийся внутри камеры Б вакуум и занятое диафрагмой 3 положение. Захват накладывается на поверхность груза. Опорная поверхность уплотнительного кольца 7 корпуса 1 входит в контакт с поверхностью груза и герметизирует стык между корпусом 1 и поверхностью груза. Камера А сообщается с источником вакуума через центральный штуцер 2 и запорный вентиль 11 (возможно соединение камеры А с источником вакуума через запорный вентиль 10 или одновременное включение вентилей 10 и 11). Вследствие разности давлений внутри и снаружи камеры А устройство присасывается к поверхности груза. Разгерметизация устройства (отпуск груза) производится соединением камеры А с атмосферой. Для транспортирования груза с центральным сквозным отверстием камеру Б через запорный орган 5 сообщают с атмосферой и захват накладывают на транспортируемый груз 8 из расчета охвата площади сквозного отверстия уплотнительной поверхностью В диафрагмы 3. Под действием массы захвата, а также под действием воспринимаемых им усилий (массы других элементов гру зоподъемного механизма) опорная поверхность уплотнительного кольца 7 корпуса 1 входит в контакт с поверхностью груза, преодолевая сопротивление упругих элементовпружин б, которые, в свою очередь, прижимают уплотняющую поверхность В диафрагмы 3 к грузу и создают замкнутую полость в камере А на участке между уплотнительным кольцом 7 корпуса 1 и уплотняющей поверхностью В диафрагмы 3. Эту полость через запорный вентиль 10 сообщают с источником вакуума. В результате разности давлений внутри и снаружи камеры Л, ограниченной корпусом 1 с уплотнительным кольцом 7, мембраной 3, на участке ее заделки в корпусе 1 и уплотняющей поверхностью В, а также поверхностью груза 8, захват присасывается к грузу. Разгерметизация захвата (отпуск груза) осуществляется соединением камеры А через запорный вентиль 10 с атмосферой. Преимуществом предлагаемого устройства является возможность использования его для подъема и транспортирования груза, поверхность которого имеет значительную кривизну или волнистость путем создания повыщенных контактных напряжений в местах сопряжения уплотнительного кольца 7 корпуса 1 с поверхностью транспортируемого крупногабаритного груза, или при прочих равных условиях обеспечивает возможность радикального снижения массы грузоподъемного механизма, действующей на захват для создания требуемых контактных напряжений, в результате чего может быть снабжена общая металлоемкость механизмов в целом или увеличена полезная грузоподъемность действующего оборудования. В этих случаях, при транспортировании крупногабаритного груза, поверхность которого имеет значительную кривизну или волнистость, работа осуществляется следующим образом. Захват подготавливается в положение транспортирования малогабаритного груза и накладывается на поверхность транспортируемого груза. Под действием упругих элементов 6 диафрагма 3 прижимается к поверхности транспортируемого груза и уплотняющей поверхностью В выделяет из общей камеры Л полость, ограниченную диафрагмой и поверхностью груза. Эта полость по центральному щтуцеру 2 сообщается с источником вакуума и корпус захвата с уплотнительным кольцом 7 действием разности давлений прижимается к поверхности груза с усилием, определяемым геометрическими размерами камер. После этого камера Б через запорный орган 5 также сообщается с источником вакуума, в результате чего создаются дополнительные усилия, прижимающие уплотнительное кольцо 7 к поверхности груза и общая камера Л надежно герметизируется. Камера Л через запорный вентиль 10 сообщается с источником вакуума, в результате чего камера Л полностью включается в работу. В этом случае упругие элементы 6 оказывают нежелательные действия, способствующие отрыву захвата от поверхности груза, однако их усилия малы по сравнению с усилиями, развиваемыми разностью давлений и ими можно пренебречь, используя лищь положительный эффект герметизации захвата на волнистой поверхности груза. Таким образом, предложенный захват позволяет значительно увеличить ассортимент захватываемых изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1984 |
|
SU1284930A1 |
| Вакуумный захват | 1983 |
|
SU1102763A2 |
| Вакуумный захват | 1982 |
|
SU1054269A1 |
| Вакуумный захват | 1983 |
|
SU1113352A1 |
| Вакуумный захват | 1986 |
|
SU1393635A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1992 |
|
RU2050255C1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1094831A1 |
| Вакуумный электромагнитный захват | 1984 |
|
SU1204538A1 |
| ВЕНТИЛЬ ИГОЛЬЧАТЫЙ ПОД МАНОМЕТР | 2012 |
|
RU2495230C1 |
| Вакуумный эжекторный захват | 1983 |
|
SU1134521A1 |
ВАКУУ/ НЫИ ЗАХВАТ по авт. св. № 1054269, отличающийся тем, что, с полью расширения номенклатуры захватываемых изделий, он снабжен допо.тнительным запорным вентилем, при этом периферийная часть поддиафрагменной полости сообщена с источником вакуума через упомянутый вентиль. о (Л ел со оо мй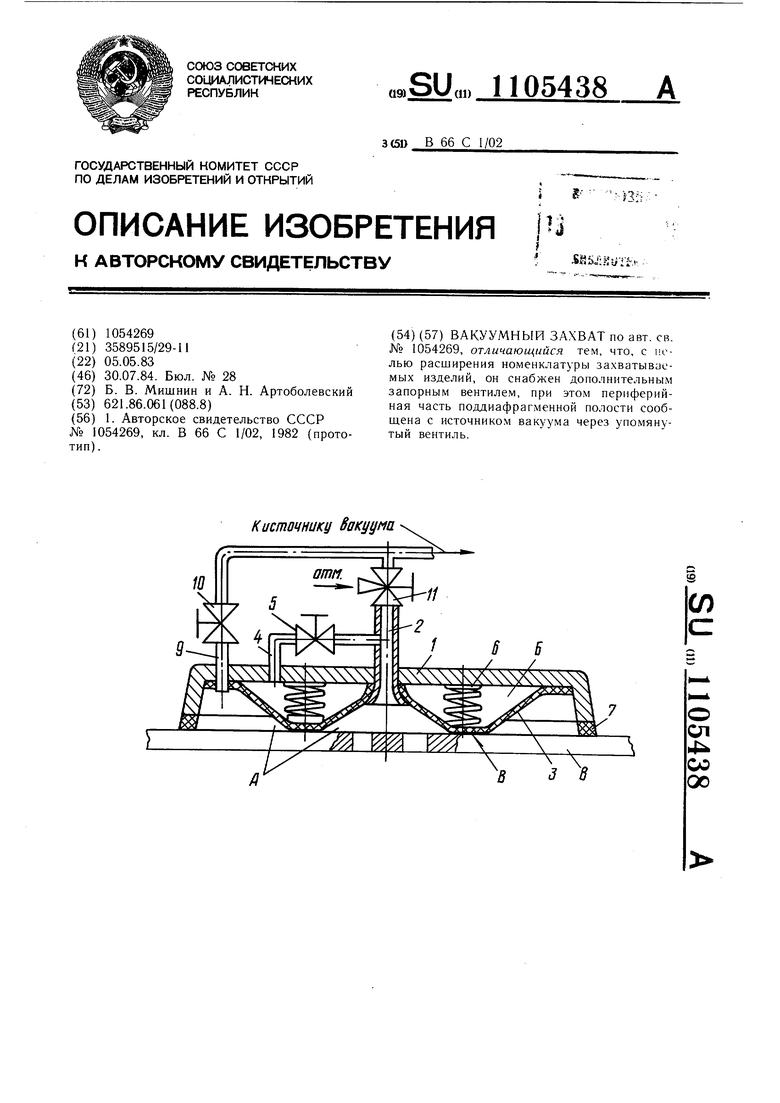
| I | |||
| Вакуумный захват | 1982 |
|
SU1054269A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
