f Изобретение относится к подъемно-транспортному оборудованию, а именно к вакуумным . грузозахватным устройствам, и может быть использовано во всех отраслях народного хозяйства для удержания пр перемещении вручную горизонтально, наклонно или вертикально расположенных изделий с плоской или криволинейной поверхностью из воздухонепроницаемого материала, По пснозному арт.св. № Ю70112 j известен вакуумный захват, содер жащий корпус с рукояткой, вакуумобразующую камеру с упругой ди афрагмой, имеющей наружный ,$урт, закрепленной на подпружиненном штоке, который установлен подвижно относительно корпуса, фиксатор верти кального положений штока, закрепленные радйально на корпусе одними своими концами изогнутые упругие стержни, вторые концы которых paisMe щены над диафрагмой по ее нар ужному контуру со стороны корпуса 1. Недостаток известного вакуумного захвата состоит в низкой надежности работы, особенно в случае перемещения достаточно тяжелых грузов, из горизонтального положения в наклонное или вертикальное. При определенном значении массы .удерживаемого груз деформации вакуумобразующей камеры могут достигать такой величины, в результате которой упругие радиальные стержни выходят КЗ соприкосновения с диафрагмой, а следовательно, нарушается фиксация положения груза относительно рукоятки захвата, что ведет к самопроизвольному отрыву груза, особенно при транспортировании его из горизонтального в наклонное или вертикальное положение. Кроме того, радиальные упругие стержни имеют, как правило, неравномерно распределенные напряжения изгиба, в .результате чего в процесс работы изменяются уп зугие свойства стержней или происходят их поломки .что снижает надежность работы захвата. Цель изобретения - повышение надежности работы. Поставленная цель достигается тем, что в вакуумном захвате бурт диафрагьзы выполнен с вертикальным прямолинейным участком с внутренней 102 сторонь, при этом вторые концы стержней размещены над диафрагмой с возможностью взаимодействия их конечных участков с вертикальным участкой бурта. На чертеже схематично изображен вакуумный захват, общий вид. Вакуумный захват имеет корпус 1, соединенный с рукояткой 2, шток 3, соединенный с упругой диафрагмой 4 вакуумобразующей камеры, фиксатор 5 рабочего положения штока, входящий в зацепление в гнездо 6 штока 3, фиксатор 7 поворота корпуса относительно штока 3, входящий в зацепление с продольным пазом 8 на штоке, упругие радиальные стержни 9, подпружиненные двуплечие рычаги 10 и И для приводов фиксаторов 5 и 7, пружину сжатия 12. На периферии вакуумобразующей камеры выполнен бурт А, выступающий над плоскостью Б диафрагмы 4 в сторону корпуса 1. Упругие радиальные стержни 9 снабжены опорной поверхностью в виде полукольца радиуса R и участка I, изогнутого в сторону боковой стенки В бурта А вакуумобразующей камеры, и выполнены в виде бруса равного сопротивления изгибу. Вакуумный захват работает следующим образом. Вакуумньй захват устанавливается на поверхность транспортируемого груза и производится нажим на рукоятку 2 до ввода фиксатора 5 рабочего положения штока в гнездо 6 штока и производится транспортирование груза. Подпружиненный фиксатор 5 входит в зацепление со штоком автоматически. При нажатии на рукоятку 2 корпус 1перемещается вдоль оси щтока 3, сжимая упругие стержни 9 и пружину 12, При этом упругие стержни 9, опираясь на внешнюю поверхность бурта А вакуумобразующей камеры, герметизируют стык транспортируемого груза и накапливают энергию сжатия. Пружина 12 перемещает среднюю часть диафрагмы 4: в крайнее нижнее положение, вытесняя атмосферный воздух из вакуумобразующей камеры, ограниченной поверхностью транспортируемого груза. При снятии нагрузки на рукоятку 2(переходный момент, предшествующий подъему захвата с закрепленным грузом) упругие стержни 9 под деиствием накопленной энергии перемещают корпус 1 и соединенный с ним через фиксатор 5 шток 3 и среднюю часть диафрагмы 4 вверх по поверхности груза. При этом в вакуумобразующей камере создается разреже1ше воздуха, необходимое для удержания груза при транспортировании. Для разгрузки захвата нажимают на рычаг 10. При этом фиксатор 5 штока в рабочем положении выходит и гнезда 6 и корпус 1 под действием упругих стержней 9 перемещается вве до полной разгрузки упругих элементов. В дальнейшем под действием пружи ны I2 корпус 1 перемещается вверх и образует зазор Н между опорной поверхностью радиальных стержней и бу том А вакуумобразующей камеры, в результате чего действие нагрузок н диафрагму полностью прекращается. Д афрагма занимает свободное положение и образует зазор в стыке груззахват. Захват отводится от транспор тируемого груза, В зависимости от характера выполняемой технологической операции устанавливается заданное значение разрежения воздуха в вакуумобразующей камере. Для этого фиксатор 7 по ворота корпуса относительно штока устанавливают в один из продольных пазов 8 на штоке 3, которому соответствует гнездо 6 под фиксатор 5, расположенное в определенном сечении по длине штока. Последующая работа ведется, как указано выше. Во всех случаях захвата подлежащих транспортированию грузов при на жатии на рукоятку 2 в начальный момент к бурту А подходит опорная поверхность из полукольца радиальных стержней 9, выбирает зазор между буртом и ра.диальными стержнями и со дает сосредоточенные нагрузки, перемещающие периферийную часть диафрагмы с уплотнительной поверхностью в сторону груза. Такое воздействие на периферийную часть диафрагмы создает благоприятные условия для обеспечения ге метичности стыка груз-захват. При дальнейшем перемещении рукоятки 2 в сторону груза радиальные стержни 9 прогибаются, их участокГ входит в сопряжение с буртом А и ох ватывает его боковую стенку В. При 9104 таком положении на бурт А вакуумобразующей камеры передаются равномерно распределенные по всей опорной поверхности нагрузки, а концы радиальных стержней, изогнутые в сторону боковой стенки В, препятствуют перемещению периферийной части вакуумобразующей камеры к центр сохраняя тем самым герметичность стыка груз-захват. При транспортировании груза захватом из горизонтального в наклонное или вертикальное положение изогнутые концы Г опорной поверхности радиальных стержней 9, контактируя с боковой стенкой В бурта А, удерживают вакуумобразукяцую камеру с грузом от перемещений относительно корпуса 1 и рукоятки 2, в результате чего повьш1ается надежность удержания груза во всех положениях и надежность работы захвата в целом. Высота бурта А и длина участка Г радиальных стержней 9, сопрягаемая с боковй стенкой В бурта А, назначается с учетом допустимой деформации диафрагмы 4 вакуумобразующей камеры от действия массы груза, поэтому контакт упругих радиальных стержней с боковой стенкой В не нарушается в течение всего процесса перемещения груза в пространстве, чем обеспечивается надежная работа захвата путем фиксации груза относительно рукоятки. Повьшение надежности работы захвата дополнительно достигается тем, что радиальные упругие стержни выполнены в виде бруса, равного сопротивления изгибу. Конструктивный .элемент радиального стержня -опора из полукольца обеспечивает в определенной степени равномерное сопротивление изгибу, кроме того, стер-. жень при равной толщине выполняется с переменной шириной в виде усеченного конуса, или при равной ширине стержня на его поверхности выполняются отбортовки переменной высоты, чем обеспечивается равенство изгибных напряжений по всей длнне радиального стержня и, как следствие, его высокая надежность в работе. Такнм образом, предлагаемый вакуумный захват имеет повышенную надежность работы, особенно в случае перемещення изделий из горнзонтального Б наклонное илн вертикальное положение, что обеспечивается введением в конструкцию вакуумобразующей камеры бурта, выступающего над плоскостью диафраг1Ф1, сопряженного с радиальтимЛ упругими стержнями через опорную поверхность из полукольца и участка, изогнутого в сторону его боковой стенки, а также тем, что радиальные упругие стержни выполнены в виде бруса равного сопротивления изгибу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1982 |
|
SU1070112A1 |
| Вакуумный захват | 1983 |
|
SU1102763A2 |
| Вакуумный захват | 1983 |
|
SU1105438A2 |
| Вакуумный захват | 1982 |
|
SU1054269A1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373666A1 |
| Вакуумный захват | 1979 |
|
SU981176A1 |
| Вакуумное грузозахватное устройство | 1989 |
|
SU1676989A1 |
| Вакуумное грузозахватное устройство | 1984 |
|
SU1184786A1 |
| Вакуумный захват | 1984 |
|
SU1284930A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
ВАКУУМШ)Й ЗАХВАТ, по авт. св. № 10/0112, отличающийс я тем, что, с целью повышения надежности работы, бурт диафрагмы выполнен с вертикальным прямолинейным участком с внутренней стороны, при этом вторые концы стержней размещены над диафрагмой с возможностью взаимодействия их конечных участков с вертикальным участком бурта.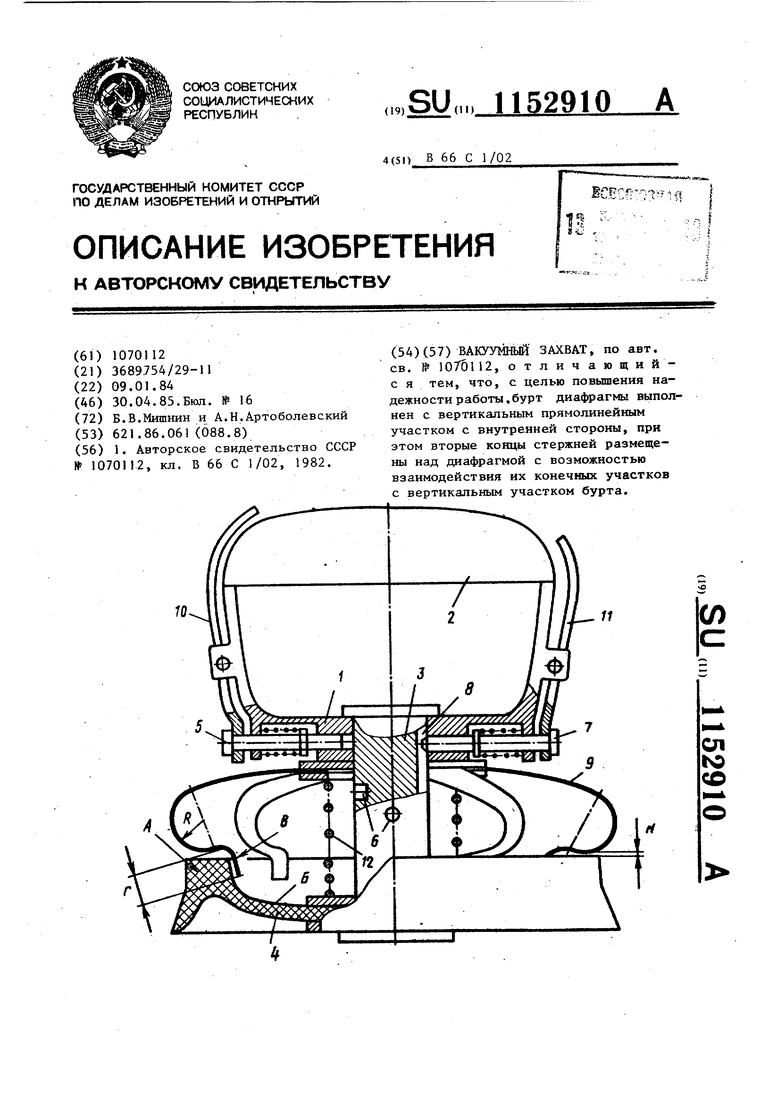
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вакуумный захват | 1982 |
|
SU1070112A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
