Изобретение относится к навесным грузозахватным устройствам и может быть использовано для подъема, удержания штучных грузов грузоподъемными машинами общепромышленного назначения без их дополнительной доработки.
Цель изобретения - улучшение эксплуатационных качеств путем обеспечения автоматического поворота рамы в горизонтальное положение после укладки груза.
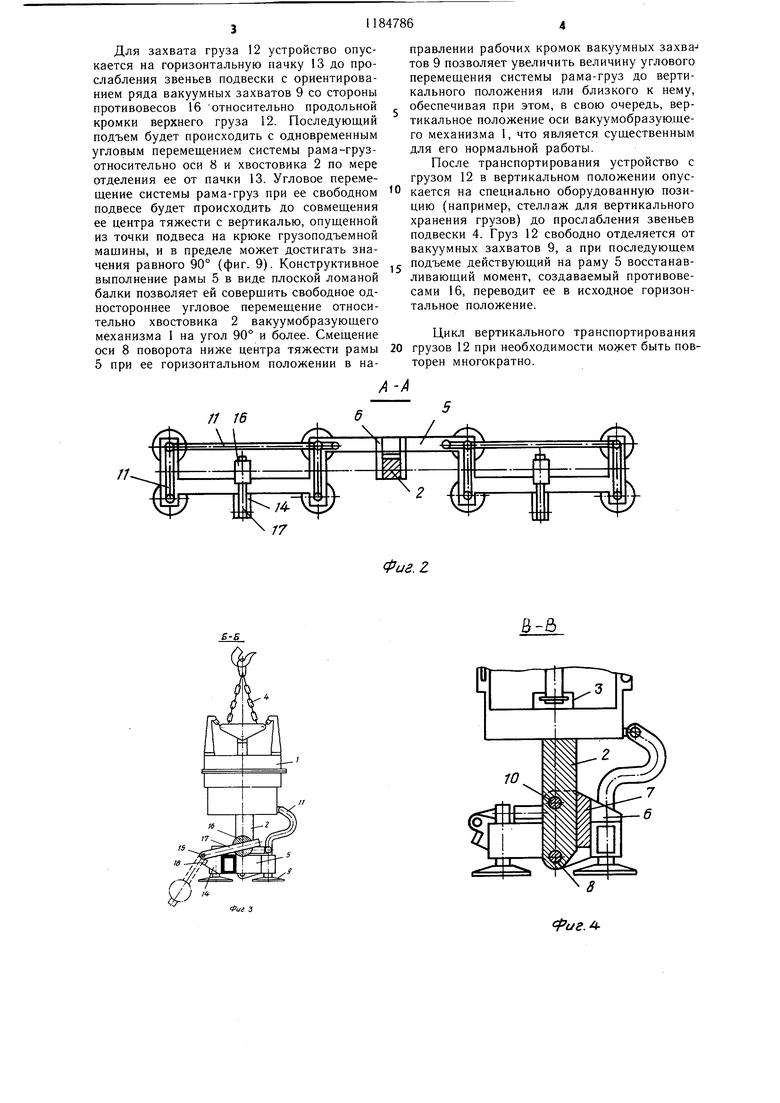
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - устройство в положении опускания установки на горизонтальную пачку груза в момент захвата груза; на фиг. 6 - удержание груза при подъеме и горизонтальном его транспортировании; на фиг. 7 - устройство в положении опускания для вертикального транспортирования; на фиг. 8 - то же, в момент захвата; на фиг. 9 - вертикальное транспортирование.
Устройство содержит безнасосный диафрагменно-поршневого типа вакуумобразующий механизм 1 с хвостовиком 2, встроенный переключатель 3 рабочих тактов и подвеску 4 для крепления к грузойодъемной . К хвостовику 2 шарнирно закреплена рама 5, выполненная в виде плоской ломаной балки с чередующимися продольными и поперечными элементами. К раме 5 закреплен кронштейн 6 с установленным на нем ограничителем 7 одностороннего поворота рамы на оси 8, установленной параллельно продольным элементам рамы 5 и вынесенной вниз в направлении рабочих кромок вакуумных захватов 9. Хвостовик 2 и кронштейн 6 выполнены с возможностью установки между ними фиксатора 10. Вакуумные захваты 9 установлены на раме 5 симметрично в продольном и поперечном направлениях, соединены вакуумпроводами 11 с вакуумобразующим механизмом 1 и являются рабочими органами, контактирующими с грузом 12, который может быть уложен в горизонтальную пачку 13. Рама 5 снабжена кронштейнами 14, к которым посредством пальцев 15 шарнирно закреплены противовесы 16 для изменения положения центра тяжести рамы 5, установленные с возможностью регулировки их положения на рычагах 17. Для ограничения поворота рычагов 17 с противовесами 16 на кронштейнах 14 предусмотрены упоры 18.
Устройство работает следующим образом.
Принцип работы безнасосного вакуумобразующего механизма основан на известном способе создания разрежения путем одноразового изменения объема вакуумной камеры, осуществляемого при подъеме груза
Для горизонтального транспортирования грузов 12 откидные рычаги 17 с противовесами 16 устройства находятся над рамой 5, а хвостовик 2 вакуумобразующего механизма 1 соединяется фиксатором 10 с кронштейном 6 рамы 5. Поскольку рама 5 уравновешена относительно оси 8 и ее центр тяжести находится на одной вертикали с точкой подвеса механизма 1 на крюк грузоподъемной машины, рабочие кромки вакуумных захватов 9 лежат в горизонтальной плоскости.
В таком положении устройство опускается на горизонтальную пачку 13 до прослабления звеньев подвески 4, обеспечивающей срабатывание переключателя 3 рабочих тактов. При этом необходимо стремиться к совмещению центров тяжести рамы 5 и верхнего груза 12 в пачке 13, для чего установка устройства производится с ориентированием его либо относительно центральных осей груза 12, либо относительно одной из его диагоналей, при этом все вакуумные захваты 9 должны лежать на поверхности груза 12. Соблюдение указанных условий позволяет при последующем подъеме устройства с грузом 12 обеспечить им горизонтальное положение во время транспортирования. При укладке груза 12 устройство также опускается до прослабления звеньев подвески 4 для срабатывания переключателя 3 рабочих тактов, который сообщает полость вакуумных захватов 9 через вакуумпроводы 11 с атмосферой, и груз 12 отделяется от них при последующем подъеме устройства. Цикл горизонтального транспортирования грузов 12 при необходимости может быть повторен многократно.
Для вертикального транспортирования грузов следует произвести разовую переналадку, заключающуюся в удалении фиксатора 10 и повороте рычагов 17 с противовесами 16 до контактирования их с упорами 18. При этом происходит смещение центра тяжести рамы 5 с закрепленными на ней элементами относительно оси 8 и возникает момент, стремящийся развернуть раму 5 до положения устойчивого равновесия, воспринимаемый, однако, ограничителем 7 поворота и хвостовиком 2. Момент является величиной расчетной, определяемой из необходимости компенсации действия моментов противоположного направления, возникающих при отклонении рамы 5 от горизонтального положения, преодолении сил трения в шарнирном соединении рамы 5 с хвостовиком 2 и жесткости деформируемых при повороте участков вакуумпроводов 11 от вакуумобразующего механизма 1 до рамы 5. Однако возможно незначительное отклонение от горизонтального положения всего устройства за счет углового перемещения относительно точки подвеса на крюке грузоподъемной машины, что не имеет сушественного значения.
Для захвата груза 12 устройство опускается на горизонтальную пачку 13 до прослабления звеньев подвески с ориентированием ряда вакуумных захватов 9 со стороны противовесов 16 относительно продольной кромки верхнего груза 12. Последующий подъем будет происходить с одновременным угловым перемещением системы рама-грузотносительно оси 8 и хвостовика 2 по мере отделения ее от пачки 13. Угловое перемещение системы рама-груз при ее свободном подвесе будет происходить до совмещения ее центра тяжести с вертикалью, опущенной из точки подвеса на крюке грузоподъемной мащины, и в пределе может достигать значения равного 90° (фиг. 9). Конструктивное выполнение рамы 5 в виде плоской ломаной балки позволяет ей совершить свободное одностороннее угловое перемещение относительно хвостовика 2 вакуумобразующего механизма 1 на угол 90° и более. Смещение оси 8 поворота ниже центра тяжести рамы 5 при ее горизонтальном положении в на//
правлении рабочих кромок вакуумных захватов 9 позволяет увеличить величину углового перемещения системы рама-груз до вертикального положения или близкого к нему, обеспечивая при этом, в свою очередь, вертикальное положение оси вакуумобразующего механизма 1, что является существенным для его нормальной работы.
После транспортирования устройство с грузом 12 в вертикальном положении опускается на специально оборудованную позицию (например, стеллаж для вертикального хранения грузов) до прослабления звеньев подвески 4. Груз 12 свободно отделяется от вакуумных захватов 9, а при последующем
подъеме действующий на раму 5 восстанавливающий момент, создаваемый противовесами 16, переводит ее в исходное горизонтальное положение.
Цикл вертикального транспортирования грузов 12 при необходимости мо;«ет быть повторен многократно.
Фиг.г гб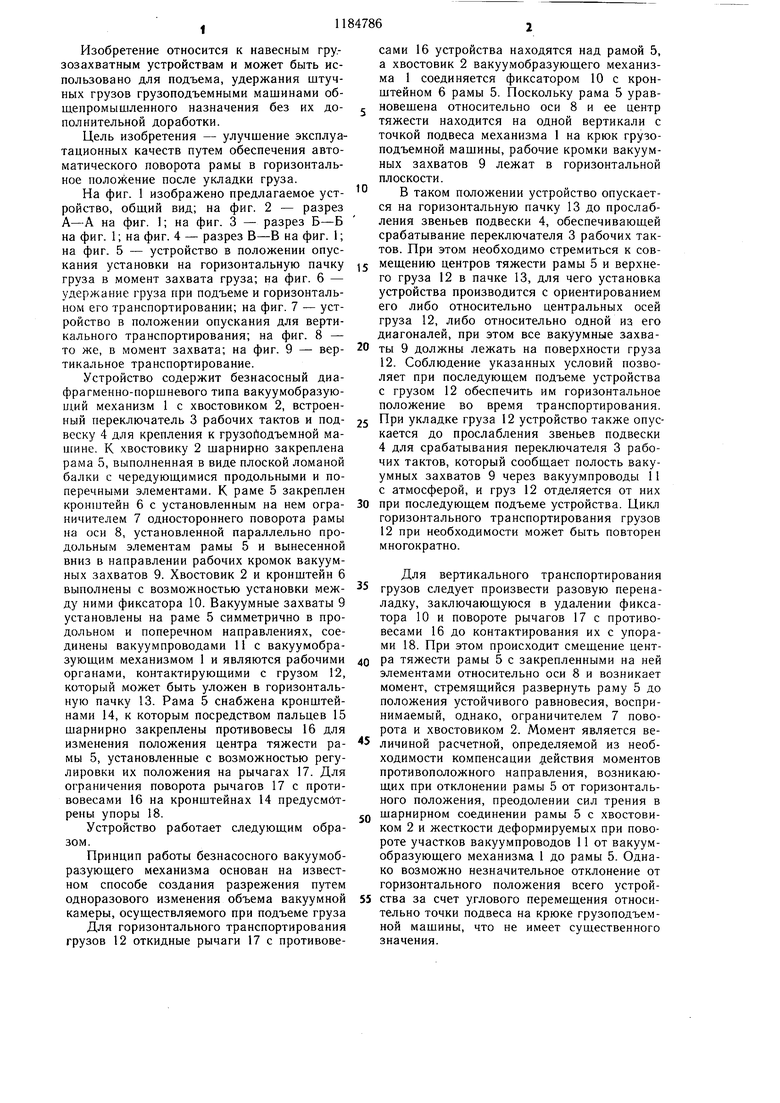
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНСОЛЬНАЯ ТРАВЕРСА | 1991 |
|
RU2025446C1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| Вакуумное грузозахватное устройство | 1984 |
|
SU1199734A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ ГРУЗОПОДЪЕМНОГО СТРЕЛОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2281242C1 |
| Захватное устройство для грузов со скобой | 1985 |
|
SU1502454A1 |
| Устройство для обслуживания светильников в промышленных зданиях | 1989 |
|
SU1710487A1 |
| Захват-кантователь | 1985 |
|
SU1339081A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство для подъема штучных грузов коробчатого сечения | 1974 |
|
SU550330A1 |
ВАКУУМНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО, содержащее раму, на которой закреплены вакуумные захваты, навешиваемый на крюк грузоподъемной машины вакуумобразующий механизм, с корпусом которого соединена с возможностью поворота в вертикальной плоскости рама, механизм фиксации взаимного папожения р;;мы и корпуса, отличающееся тем, что, с целью улучп1еиия эксплуатационных качеств путем обеспечения автоматического поворо та рамы в горизонтальное по.юженнс после укладкп груза, рама образована расположенными взаимно перпоидику.чярпс) с чередованием между собой э,1емептами, .чежаш,ими в одной плоскости и образукмцимп ломаную балку, и снабжена поворотН1 1м в вертикальной плоскости противовесом, причем корпус вакуумобразующего механизма выполнен с выступаюн1пм вниз хвостовиком, шарнирно соединенным с рамой, а ось Hiapнира расположена горизонтально в вертикальной плоскости, проходяп1ей через центр тяжести рамы и точку подвеса корпуса куумобразуюцд.его меха1шзма к крюку грузоподъемпой машины. (Л 00 00 О5
S-5
| Вайнсон А | |||
| А., Андреев А | |||
| Ф | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| ДВОЙНОЙ ГАЕЧНЫЙ КЛЮЧ | 1920 |
|
SU288A1 |
| Подвижной рельс для пересечений железнодорожных путей | 1922 |
|
SU456A1 |
| Вайнсон А | |||
| А.,Андреев А | |||
| Ф | |||
| Специализированные крановые грузозахваты для штучных грузов | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
