Известные конструкции кантователей для блюмингов и блюминговслябингов, смонтированных на линейках манипулятора, не обеспечивают надежности механического движения кантовки, из-за чего они не могут быть автоматизированы.
Описываемая конструкция кантователя обладает надежным механическим движением кантовки и легко поддается автоматизации. Отличительной особенностью этого кантователя является то, что его рабочий орган выполнен в виде горизонтальных катящихся крюков, связанных посредством тяг и рычагов с общим валом.
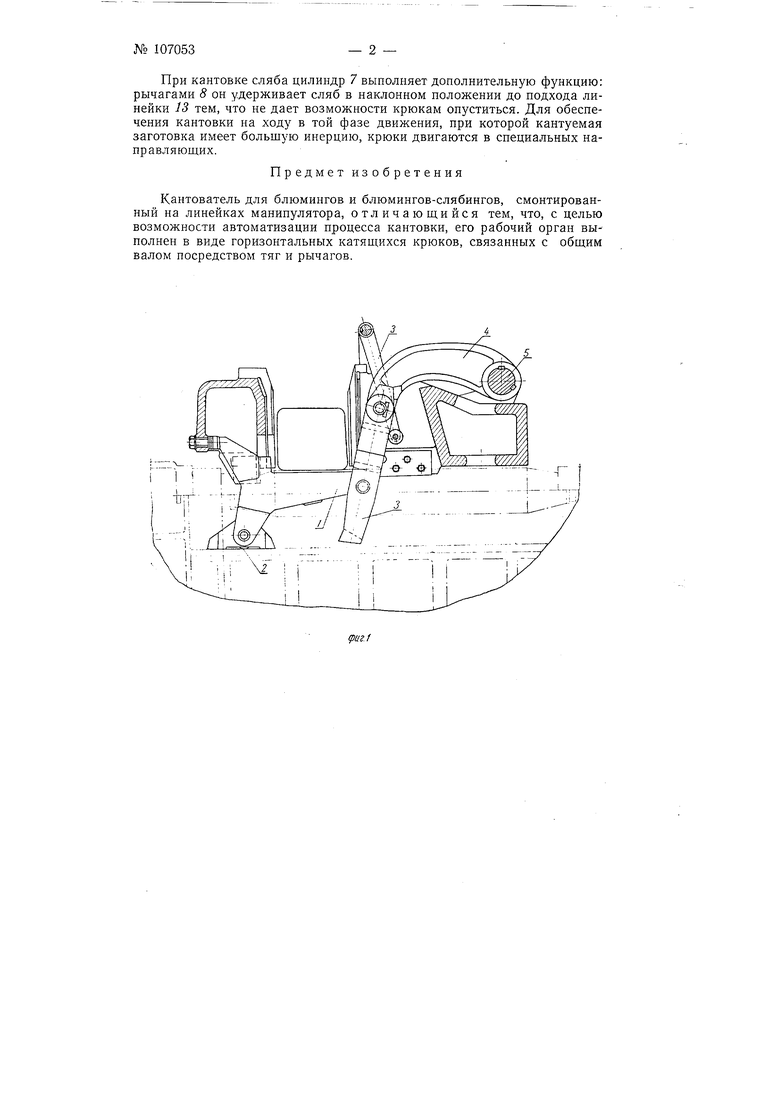
Кантователь, смонтированный на линейках манипулятора, включает кантующий орган /, опирающийся одним концом, на котором укреплен каток 2, защищенный от окалины специальным кожухом, на траверсу, укрепленную на раме рабочего рольганга, а другим - на тягу 3, подвещенную на рычаге 4, жестко укрепленном на валу 5, который опирается на три подщипника скольжения, расположенных на линейке манипулятора (см. фиг. 1).
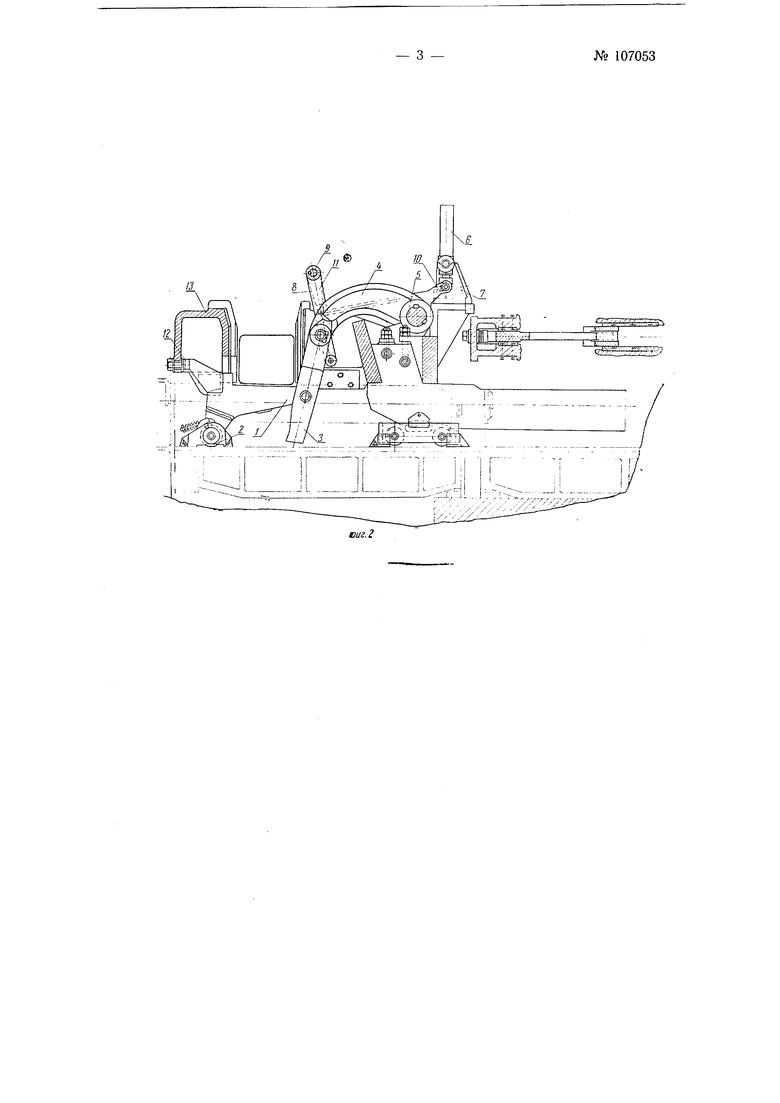
Механизм возврата крюков в исходное положение состоит из двух гидравлических или пневматических цилиндров 6 и 7, смонтированных на линейке манипулятора, и четырех рычагов 8, жестко насаженных на валу 9. Цилиндр 6 соединен с валом 5 через рычаг 10, а цилиндр 7 соединен с валом 9 через рычаг 11 (см. фиг. 2).
Работа кантователя производится следующим образом.
После принятия заготовки линейками манипулятора дается импульс на кантовку. От этого импульса привод поворачивает вал 5. При повороте вала рычаги 4 через тяги 3 перемещают и поворачивают катящиеся крюки в положение, необходимое для кантовки. После кантовки линейки манипулятора перемещают заготовку к калибру и задают ее в валки. Как только заготовка выйдет из линеек, крюки возвращаются в исходное положение одновременным включением цилиндров 6 к 7. Цилиндры подобраны таким образом, что сила цилиндра 7, преодолевая силу цилиндра б, выводит опорный ролик 2 крюка из зоны распора, после чего согласованным действием обоих цилиндров крюки складываются и выдвигаются вперед до упора 12 в линейке 13.
При кантовке сляба цилиндр 7 выполняет дополнительную функцию: рычагами 8 он удерживает сляб в наклонном положении до подхода линейки J3 тем, что не дает возможности крюкам опуститься. Для обеспечения кантовки на ходу в той фазе движения, при которой кантуемая заготовка имеет большую инерцию, крюки двигаются в специальных напр ав„1яющих.
Предмет изобретения
Кантователь для блюмингов и блюмингов-слябингов, смонтированный на линейках манипулятора, отличающийся тем, что, с целью возможности автоматизации процесса кантовки, его рабочий орган выполнен в виде горизонтальных катящихся крюков, связанных с общим валом посредством тяг и рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Блюминг-автомат для прокатки блюмов и слябов | 1961 |
|
SU149376A1 |
| Способ подачи затравки в кристаллизатор машины непрерывной разливки металла | 1957 |
|
SU115715A1 |
| Кривошипно-шатунный механизм | 1980 |
|
SU998807A1 |
| Манипулятор с кантователем к обжимному стану | 1936 |
|
SU51014A1 |
| СПОСОБ РЕВЕРСИВНОЙ ПРОКАТКИ В СМЕЖНЫХ КАЛИБРАХ ПРЯМОУГОЛЬНОЙ ИЛИ ФАСОННОЙ ЗАГОТОВКИ | 1999 |
|
RU2197337C2 |
| Манипулятор с кантователем к обжимному стану | 1936 |
|
SU51053A1 |
| МАНИПУЛЯТОР —КАНТОВАТЕЛЬ ОБЖИМНОГО ПРОКАТНОГО СТАНА | 1972 |
|
SU327954A1 |
| Манипулятор с кантователем обжимного прокатного стана | 1982 |
|
SU1217517A1 |
| Утепляемые подвижные пальцы на линейке манипулятора, действующие синхронно с крюками кантователя | 1957 |
|
SU115350A1 |
| Манипулятор с кантователем | 1982 |
|
SU1219198A1 |