8
29
25
СП
OD Ю
Изобретение относится к грузоподъемным элементам, используемых в кранах, и может быть использовано преимущественно для укладки тротуарных плит, а также для других погрузочных работ.
Известно захватное устройство, содержащее корпус с вакуумной камерой, установленную на корпусе стойку с подвижной в вертикальном направлении траверсой, соединенной со стрелой грузоподъемного механизма, подхватные рычаги, шарнирно соединенные с траверсой, и механизм фиксации траверсы относительно стойки 1.
Однако при эксплуатации известного захвата нельзя раздельно использовать механический и вакуумный захваты, ибо они кинематически связаны между собой. Это ограничивает возможности применения, особенно при закреплении грузов шероховатой поверхностью, а также при укладке их на наклонную поверхность.
Це.чью устройства является повышение .ксилуатационных качеств.
Указанная цель достигается тем; что в HdxFsaTHOM устройстве, содержащем корпус е вакуумной камерой, установленную на ))nyce стойку с подвижной в вертикальном направлении траверсой, соединенной со стре.и)й грузоподъемного механизма, .подхватiii.K рычаги, шарнирно соединенные с тра:.|)C(jfi, и механизм фиксации траверсы относительно стойки, последняя выполнена иолой и с окнами, а механизм фиксации включает размещенные в полости стойки подпружиненный сильфон и двуплечие рычаги, одно плечо каждого из которых посредством тяги соединено с сильфоном, а другое расположено в соответствующем окне стойки, при этом в траверсе выполнены окна, соответствующие окнам стойки для других плечей рычагов, а полость сильфона соединена с источником вакуума.
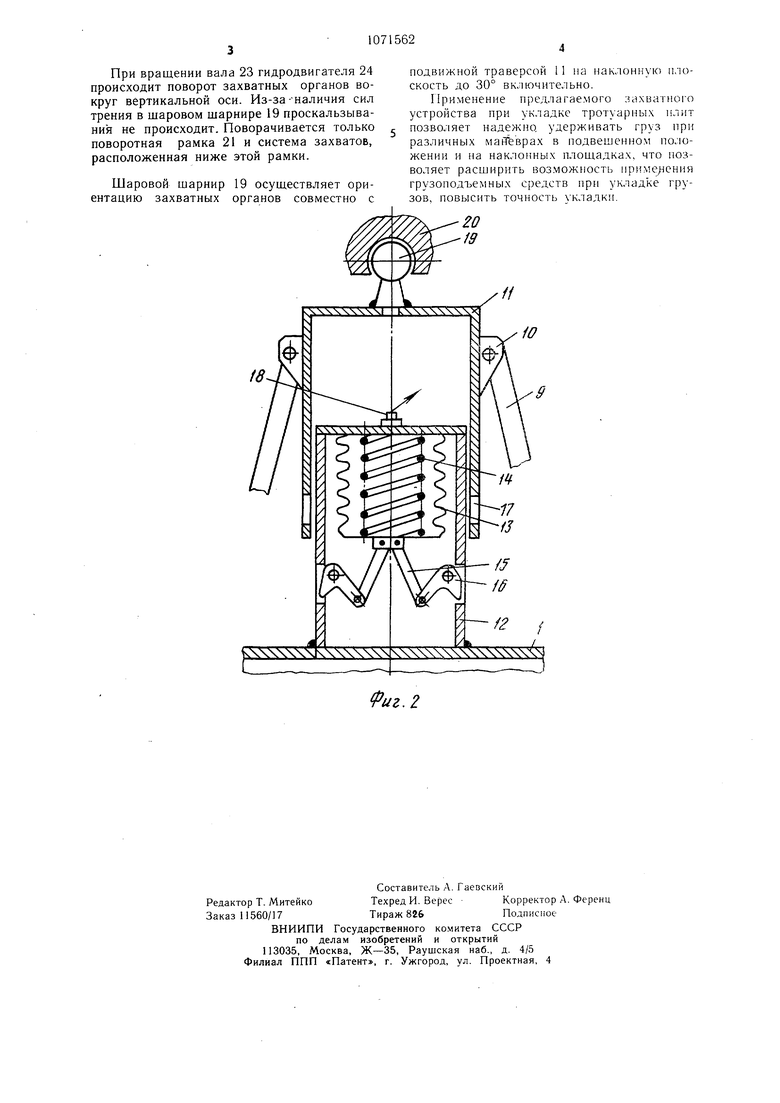
На фиг. 1 изображена кине.матическая схема захватного устройства; на фиг. 2 - стойка с сильфоном и траверса при автономном действии подхватов.
Захватное устройство содержит плоский диск 1 с кольцевым пазо.м 2, в который вло,жена губчатая резина 3, образующая EsaKyумную ка.меру 4, соединенную через штуцер 5 с вакуумной .системой (не показана).
Для механического захвата грузов имеются симметрично расположенные подхватные рычаги 6, шарнирно укрепленные на кронштейнах 7, служащих одновременно и ребрами жесткости для плоского диска 1. На свободном конце рычагов 6 закреплен вращающийся центр-грибок 8, а другой конец укреплен шарнирной тягой 9 к проушине 10 подвижной траверсы 11, которая телескопически закреплена на пустотелой стойке 12 (фиг. 2).
Внутри стойки 12 установлен сильфон 13 с пружиной 14, соединенный через шарнирные рычаги 15 с защелками 16, взаимодействующими с окнами 17 в боковинах траверсы 11. Сильфон соединен с вакуумной системой штуцером 18. На телескопической траверсе 11 укреплен шаровой шарнир 19, кинематически связанный с шаровы.м гнездом 20, закрепленным в поворотной рамке 21 болтами 22. Поворотная рамка укреплена на выходном конце вала 23 гидродвигателя 24, который в свою очередь опирается на
упорн)й шариковый подшипник 25. Гидродвигатель 24 вмонтирован в скобу 26, которая крепится к рукояти экскаватора 27 пальцем 28. Плита 29 условно показана зажатой во вращающихся центрах-грибках 8 при автономном действии механического захвата.
5 Захватное устройство работает следующим образом.
При автоно.мной работе вакуумным захватом необходимо вакуумную камеру 4 опустить на груз, например тротуарную плиQ ту 29, и через штуцер 5 создать вакуум в ней. Груз при этом присасывается и может транспортироваться. В этом случае телескопическая система находится в сомкнутом положении при помощи защелок 16, в результате чего подхватник рычага 6 находится в
5 нерабочем положении.
Если работа производится только одними подхватными рычагами 6, то телескопическая система размыкается. Для этого захватное устройство опускается на плиту,
0 создается вакуум в сильфоне 13, который сжимается и посредством шарнирных рычагов 15 втягивается во внутрь защелки 16 из окон 17 телескопической траверсы 11. При подъеме захватного устройства происходит взятие груза рычагами 6. Сила,
5 развивае.мая захватом при зажиме, пропорциональна весу груза, т.е. чем больше груз, тем больн е сила зажима и наоборот.
Для отпуска 1фуза производят сброс вакуу.ма в сильфоне 13, который разжимается
и воздействует на шарнирные рычаги 15. Последние выталкивают защелки 16 в исходное положение.
При дальнейщем опускании траверсы 11 происходит самопроизвольное замыкание телескопической системы защелками 16.
5 Подхватные рычаги 6 остаются при этом в раскрытом положении.
Для совместной работы необходимо опустить захватное устройство на плиту 29, создать вакуум в камере 4 и присосать груз. Затем, не поднимая груза, создается вакуум
0 в сильфоне 13, что заставляет убрать защелки 16 во внутрь стойки 12. Телескопическая система размыкается, и груз зажимается дополнительно подхватными рычага.ми 6.
При отпуске груза сброс вакуума произ водят в обратном порядке, т.е. вначале вакуум сбрасывается в сильфоне 13, а затем - в вакуу.мной камере 4. При вращении вала 23 гидродвигателя 24 происходит поворот захватных органов вокруг вертикальной оси. Из-за-наличия сил трения в шаровом шарнире 19 проскальзывания не происходит. Поворачивается только поворотная рамка 21 и система захватов, расположенная ниже этой рамки. Шаровой шарнир 19 осуществляет ориентацию захватных органов совместно с
иг.2 подвижной траверсой П на наклонную плоскость до 30° включительно. Применен не предлагаемого захватно|-о устройства при укладке тротуарных нлит позволяет надежно удерживать груз нрн различных MaiTeBpax в подвешенном по.моженни и на наклонных площадках, что нозволяет расширить возможность нрименення грузоподъемных средств прн укладке грузов, повысить точность укладки.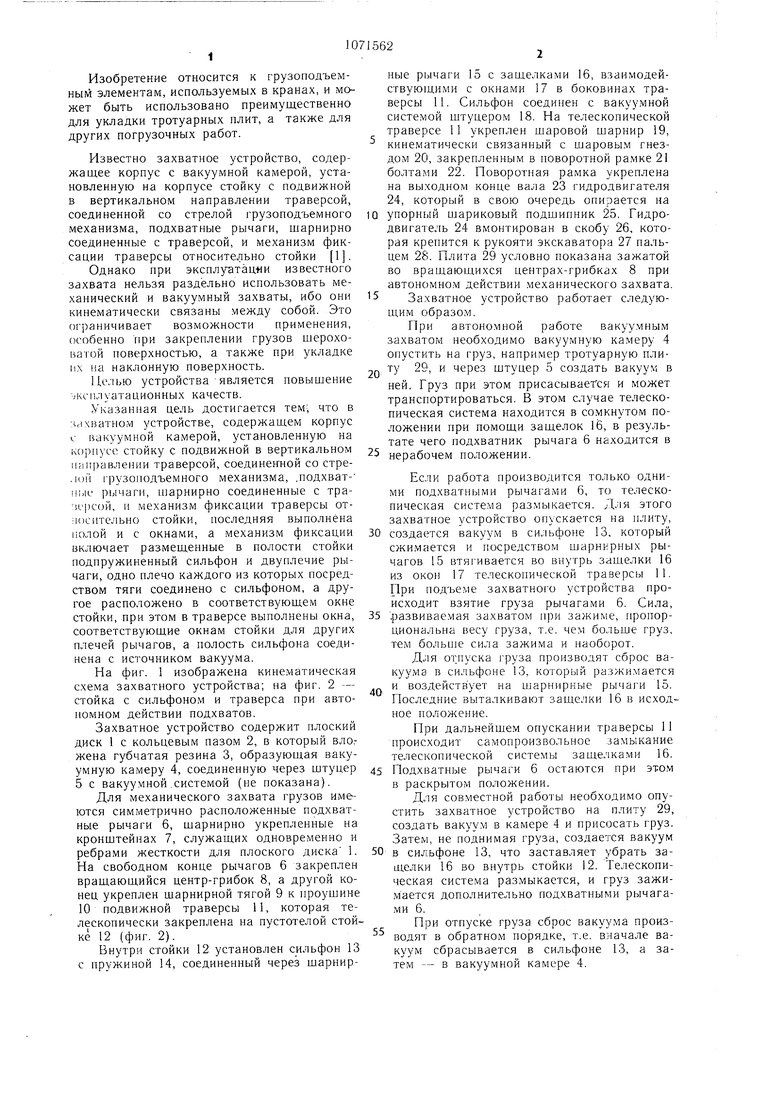
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захватное устройство для облицовочных плит | 1976 |
|
SU600068A1 |
| Грузозахватное устройство | 1982 |
|
SU1129165A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Грузозахватное устройство | 1990 |
|
SU1766815A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус с вакуумной камерой, установленную на корпусе стойку с подвижной в вертикальном направлении траверсой, соединенной со стрелой грузоподъемного механизма, подхватные рычаги, шарнирно соединенные с траверсой, и механизм фиксации траверсы относительно стойки, отличающееся тем, что, е целью повышения эксплуатационных качеств, стойка вьиюлнена полой и с окнами, а механизм фиксации включает размещенные в полости стойки подпружиненный сильфон и двуплечие рычаги, одно плечо каждого из которых посредством тяги соединено е сильфоном, а другое расположено в соответствующем окне стойки, при этом в траверсе вьиюлнепы окна, соответствующие окнам стойки для други.х плечей рычагов, а полость сильфона соединена с источником вакуума. сл -2ff 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР ло заявке N° 3454962, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
