по п, 1, отличающееся выдвижения реек зацеплении с рейками связанные между чееки
по п.
отличающееся
тем, что каждый фиксатор перемещения груза вдоль каждого стержня представляет собой два стянутых между собой посредством пружины полухомута, расположенных на каждом стержне с возможностью перемещения вдоль него.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1980 |
|
SU927710A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватное устройство | 1982 |
|
SU1126525A1 |
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Грузозахватное устройство | 1985 |
|
SU1393747A1 |
| Захватное устройство | 1986 |
|
SU1493586A1 |
| Автоматическая транспортная установка для передачи изделий с одного конвейера на другой | 1974 |
|
SU557014A1 |
| Кантователь листов | 1986 |
|
SU1362519A1 |
| Захватное устройство для листовыхМАТЕРиАлОВ | 1979 |
|
SU850546A1 |

1. ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус с прикрепленными к нему захватными органами, выполненными в виде стержней, фиксаторы перемещения груза вдоль стержней и траверсу с петлей для навещивания на грузоподъемный механизм, отличающееся тем, что, с целью расщирения эксплуатационных возможностей путем увеличения диапазона захватываемых грузов, оно снабжено скрещивающимися в двух точках корпуса и установленными на нем попарно в двух параллельных между собой плоскостях четырьмя рейками, а расположенные в одной плоскости рейки параллельны между собой, механизмом выдвижения реек и стопорным устройством, при этом захватные органы закреплены на койцах реек перпендикулярно последним. (Л СП 05 N
Изобретение относится к поъемно-транспортному обо|)удоБанию и может быть использовано для захвата и транспортирования изделий типа дисков, например, шлифовальных кругов.
Известно грузозахватное устройство, содержащее корпус с прикрепленными к нему захватными органами, выполненными в виде стержней, фиксаторы перемещения груза вдоль стержней и траверсу с петлей для навещивания на грузоподъемный механизм 1.
Недостатком указанного устройства является отсутствие возможности использования его для за.хвата и транспортирования щлифовальных кругов или других изделий типа дисков различных габаритных размеров.
Цель изобретения - расщирение эксплуатационных возможностей путем увеличения диапазона захватываемых грузов.
Указанная цель достигается тем, что грузозахватное устройство, содержащее корпус с прикрепленными к нему захватными органами, выполненнь ми в виде стержней, фиксаторы перемещения груза вдоль стержней и траверсу с петлей для навешивания на грузоподъемный механизм, снабжено скрещивающимися в двух точках корпуса и установленными на нем попарно в двух параллельных между собой плоскостях четырьмя рейками, а расположенные в одной плоскости рейки параллельны между собой, механизмом выдвижения реек и стопорным устройством, при этом захватньге органы закреплены на концах реек перпендикулярно последним.
Кроме того, механизм выдвижения реек включает находящиеся в зацеплении с рейками шестерни, кинематически связанные между собой.
Каждый фиксатор перемещения груза вдоль каждого стержня представляет собой два стянутых между собой посредством пружины полухомута, расположенных на каждом стержне с возможностью перемеидения вдоль него.
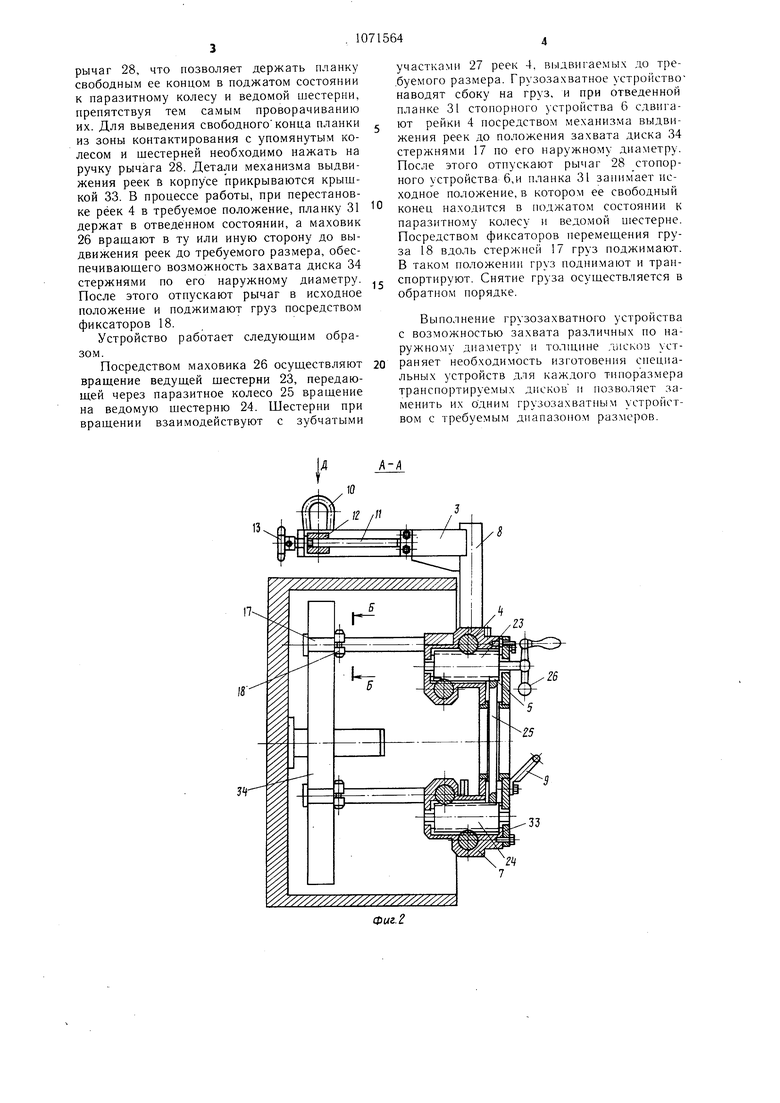
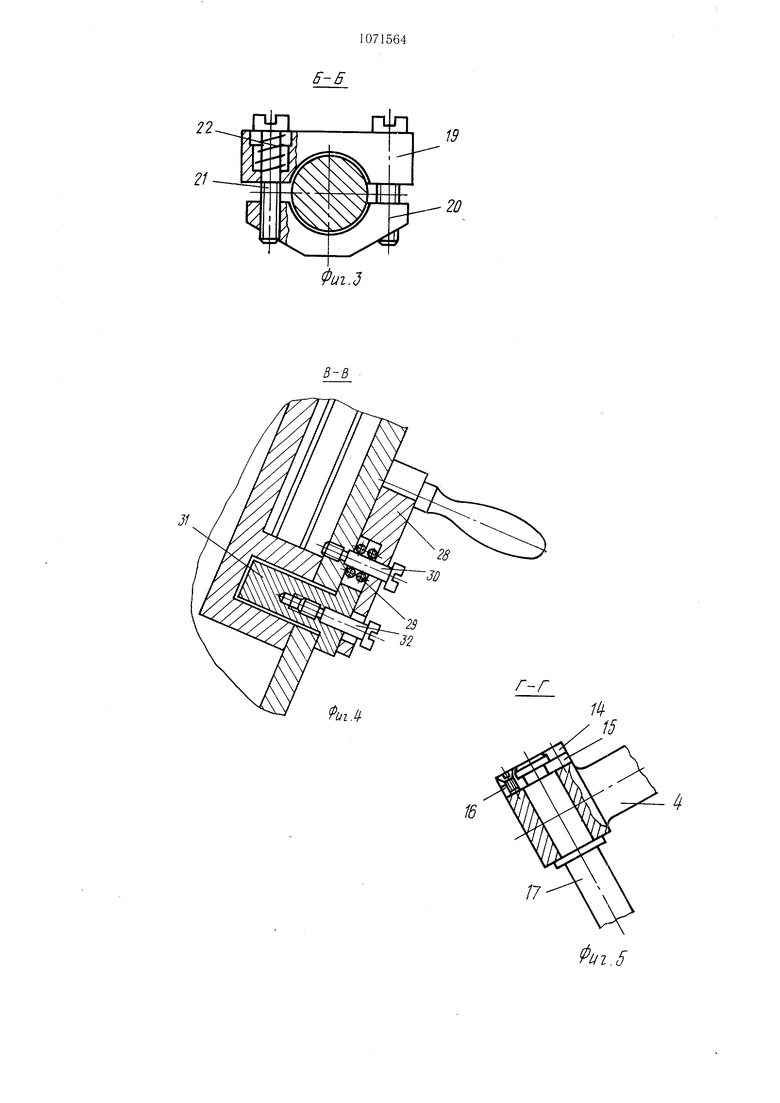
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг.З - разрез Б-Б на фиг. 2; на фиг. 4разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг.1; на фиг. 6 - вид Д на фиг. 2; на фиг. 7 - узел I на фиг. 1.
Грузозахватное устройство содержит корпус 1, захватные органы 2, траверсу 3, четыре рейки 4, механизм выдвижения реек 5, стопорное устройство 6. На корпусе I установлены в верхней и нижней части направляющие 7 под рейки 4, стойка 8 и скоба 9.Траверса 3 жестко связана со стойкой 8 и имеет петлю 10, взаимодействующую с ходовы.м винтом 11 посредством гайки 12, которая выполнена заодно с осью и имеет возможность перемещения в продольных пазах П-образной планки при проворачивании ходового винта рукояткой 13. Фиксирование гайки осуществляется посредством кольца 14 С-образной шайбы 15 и винта 16 (фиг. 6). Указанные крепежные элементы используются и в захватном органе 2, выполненном в виде- стержней 17 (фиг. 5), закрепленных на концах реек. На стержни надеты фиксаторы перемещения груза 18 вдоль стержней, выполненные в виде двух полухомутов 19 и 20 (фиг. 3), стянутых между собою посредством винтов 21 и пружины 22, что позволяет фиксатором перемещаться вдоль стержней. . еханизм выдвижения реек 5 выполнен в виде ведущей и ведомой шестерней 23 и 24, взаимодействующих между собой посредством паразитного колеса 25. Вращение шестерен осуществляется вручную носредством маховика 26. Рейки 4 выполнены с зубчатыми участками 27 и установлены в направляющих таким образом, что от каждой щестерни они расходятся в противоположные стороны.
Стопорное устройство 6 имеет рычаг 28, пружину 29, надетую на винт 30,планку 31, один конец которой связан с рычагом 28 посредством щарнира 32,а второй расположен по месту схождения паразитного колеса 25 и ведомой шестерни 24. Пружина 29 имеет два концевых усика. Одним из них она унирается в винт 30, а вторым - в
рычаг 28, что позволяет держать планку свободным ее концом в поджатом состоянии к паразитному колесу и ведомой шестерни, препятствуя тем самым проворачиванию их. Для выведения свободногоконца планки из зоны контактирования с упомянутым колесом и шестерней необходимо нажать на ручку рычага 28. Детали механизма выдвижения реек и корпусе прикрываются крышкой 33. В процессе работы, при перестановке реек 4 в требуемое положение, планку 31 держат в отведенном состоянии, а маховик 26 вращают в ту или иную сторону до выдвижения реек до требуемого размера, обеспечивающего возможность захвата диска 34 стержнями по его наружному диаметру. После этого отпускают рычаг в исходное положение и поджимают груз посредством фиксаторов 18.
Устройство работает следующим образом.
Посредством маховика 26 осуществляют вращение ведущей щестерни 23, передающей через паразитное колесо 25 вращение на ведомую шестерню 24. Шестерни при вращении взаимодействуют с зубчатыми
17
18
участками 27 реек 4, выдвигаемых до тре.буемого размера. Грузозахватное устройствонаводят сбоку на груз, и при отведенной планке 31 стопорного устройства 6 сдвигают рейки 4 посредством механизма выдвижения реек до положения захвата диска 34 стержнями 17 по его наружному диаметру. После этого отпускают рычаг 28 стопорного устройства 6,и планка 31 занимает исходное положение, в котором ее свободный конец находится в поджатом состоянии к паразитному колесу и ведомой шестерне. Посредством фиксаторов перемещения груза 18 вдоль стержней 17 груз поджимают. В таком положении груз поднимают и транспортируют. Снятие груза осуществляется в обратном порядке.
Выполнение грузозахватного устройства с возможностью захвата различных по наружному диаметру и толщине дисков устраняет необходимость изготовения снециальных устройств для каждого типоразмера транспортируемых дисков п позволяет заменить их Одним грузозахватным устройством с требуемым диапазоном размеров.
24
.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грузозахватное устройство | 1978 |
|
SU753773A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
