1
Изобретение относится к прокатному производству, в частности к устройствам для кантования и перекладки листов, и может быть исполь- зовано в агрегатах производства, отделки и контроля листов.
Цель изобретения - расширение технологических возможнастей и повышение производительности путем сов- мещения в одном устройстве операций кантовки и перекладки листов.
На фиг, 1 показана схема кантователя, поперечный разрезi на фиг, 2 - то же, вид по стрелке А, на фиг, 3, 4 - то з1се, варианты исполнения передаточного механизма кантователя.
Кантователь содержит поворотные рычаги 1, установленные на оси 2, привод поворота 3 рычагов, шарнир1 о установленную на рычагах поворотную грузозахватную траверсу 4 с вакуумными захватными камерами 5,
Кантователь снабжен передаточным механизмом 6, выполнелным в виде ки- нематически связанных между собой цепью 7 ведущей 8 и ведомой 9 звездочек. Ведущая звездочка 8 щарнирно установлена на оси 2 и кинематически связана со стационарным приводом кантовки 10, установленным на фундаменте. Ведомая звездочка 9 жестко закреплена на оси 11 поворотной грузозахватной траверсы 4, Разводка трубопроводов системы вакуумирования ,
Сне показано) с вакуумными захватными камерами 5 осуществляется с помощью двух вакуумных вертлюгов 12, установленных соосно оси 2 и оси 11 поворотной грузозахватной траверсы 4 Для осуществления контроля качества изделий предназначен контрольный стол 13 о
Для приема некондиционных изделий после контроля (разбраковки) установлен транспортер некондиции 14,
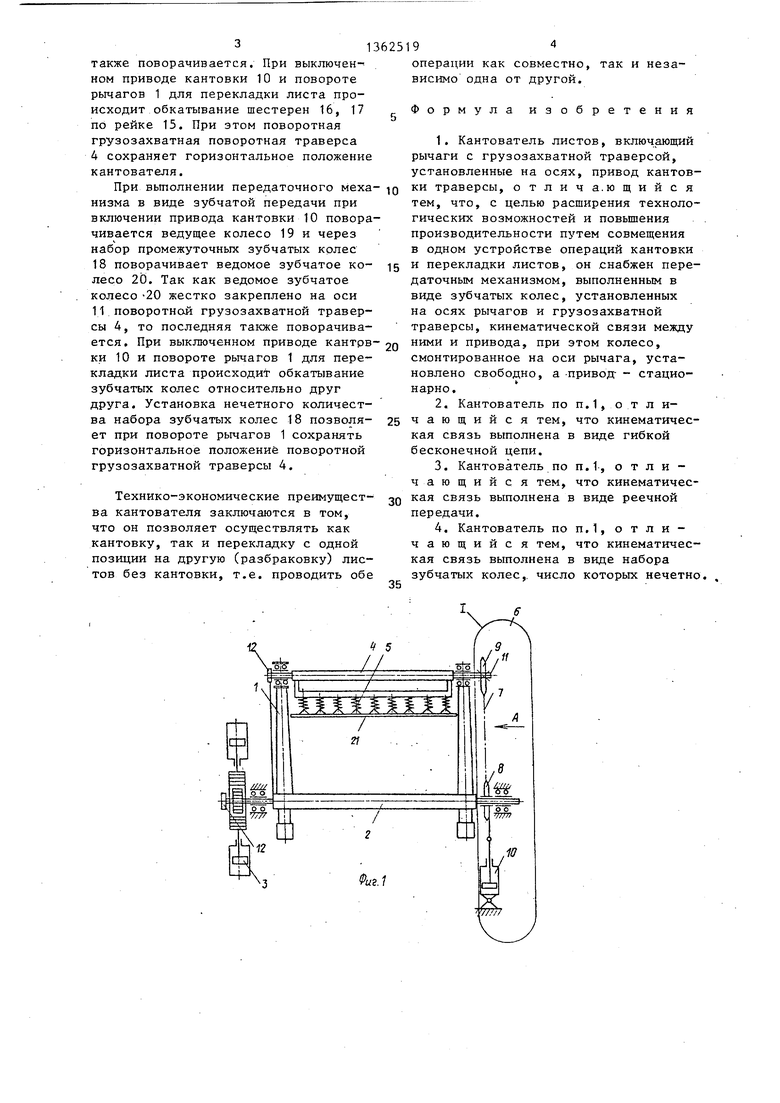
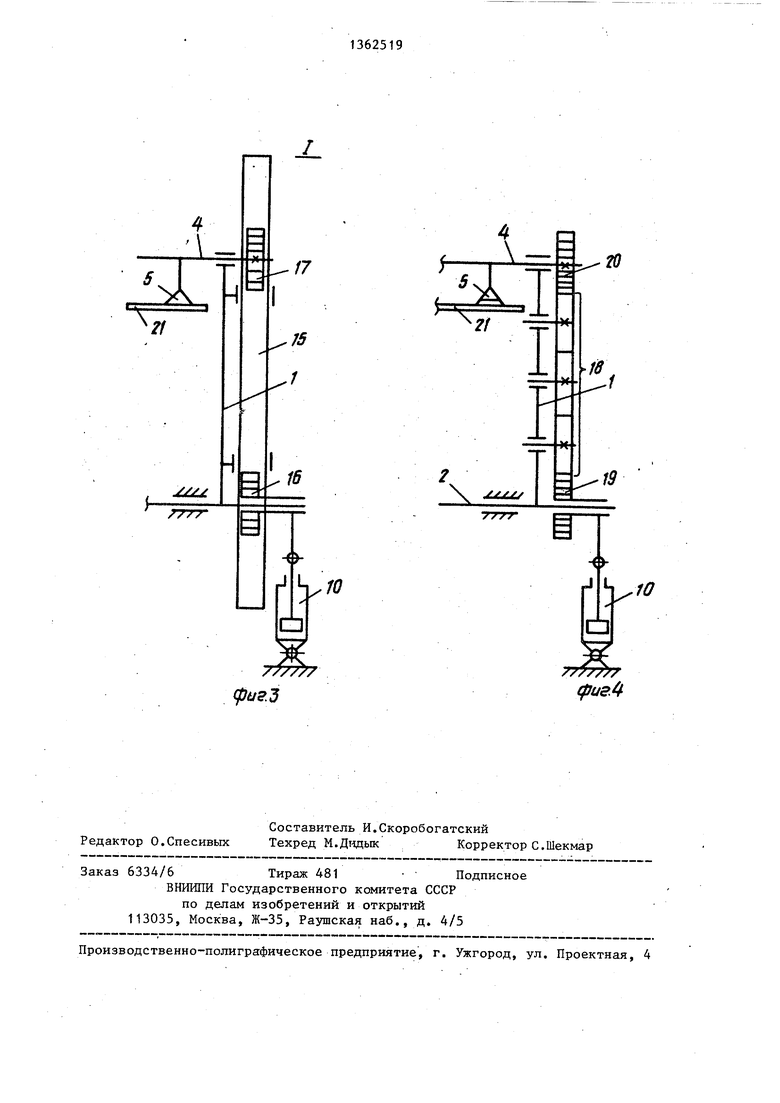
Передаточный механизм кантователя как вариант исполнения, может быть выполнен в виде реечной передачи 15, состоящей из свободно установленной на оси 2 ведущей шестерни 16, ведомой шестерни 17, жестко закрепленной на. оси 11 поворотной грузозахватной траверсы 4, и рейки 15,
Передаточный механизм кантователя может быть выполнен в виде .зубчатой передачи 18, состоящей из свободно установленного на оси 2 ведущего зубчатого колеса 19, ведомого зубча
g
o
6
0
5 О ь
5
0
5
0
192
того колеса 20, жестко закрепленного на оси П поворотной траверсы 4, и набора промежуточных зубчатых колес 18, число которых нечетно,
Работа кантователя осуществляется следующим образом.
Приводные поворотные рычаги 1 из вертикального положения приводом поворота 3 наклоняются в сторону контрольного стола 13, При этом благодаря кинематической связи между приводом кантовки 10, ведущей звёздочкой 8, установленной соосно оси , 2, и ведомой звездочкой 9, жестко закрепленной на оси 11 поворотной грузозахватной траверсы 4, поворотная грузозахватная траверса во время перемещения поворотных рычагов 1 находится постоянно в горизонтальном положении. При подходе поворотной грузозахватной траверсы 4 к контрольному столу 13 лист 21 захватывается вакуумньми захватными камерами 5 и приводные поворотные рычаги 1 при помощи привода поворота 3 поворачиваются в сторону транспортера некондиционных листов 14, I .
Привод поворота 3 останавливает в промежуточном положении поворотные рычаги 1, Приводом кантовки 10 осуществляется поворот ведущей звездочки 8 на угол 0/ кинематически связанной цепью 7 с ведомой звездочкой 9, Так как ведомая звездочка 9 жестко закреплена на оси 11 поворотной грузозахватной траверсы 4, то последняя будет также поворачиваться на угол oi для визуального осмотра контролируемого листа.
После оценки состояния качества обратной стороны листа поворотная грузозахватная траверса 4 с листом возвращается при помощи привода кантовки 10 в горизонтальное положение, В зависимости от результата инспекции обратной стороны лист подается кантователем на контрольный стол 13 или на транспортер некондиционных листов 14,
При выполнении передаточного механизма кантователя в виде реечной передачи при включении привода кантовки 10 поворачивается ведущая щес- терня 16 и через рейку 15 поворачи- в.ает ведомую шестерню 17, Так как ведомая шестерня 17 жестко закреплена на оси 11 поворотной грузозахватной траверсы 4, то последняя
также поворачивается. При выключенном приводе кантовки 10 и повороте рычагов 1 для перекладки листа происходит обкатывание шестерен 16, 17 по рейке 15. При этом поворотная грузозахватная поворотная траверса 4 сохраняет горизонтальное положение кантователя.
При вьтолнении передаточного меха- низма в виде зубчатой передачи при включении привода кантовки 10 поворачивается ведущее колесо 19 и через набор промежуточных зубчатых колес 18 поворачивает ведомое зубчатое ко- лесо 20. Так как ведомое зубчатое колесо -20 жестко закреплено на оси 11 поворотной грузозахватной траверсы 4, то последняя также поворачивается. При выключенном приводе кантрв- ки 10 и повороте рычагов 1 для перекладки листа происходит обкатывание зубчатых колес относительно друг друга. Установка нечетного количества набора зубчатых колес 18 позволя- ет при повороте рычагов 1 сохранять горизонтальное положение поворотной грузозахватной траверсы 4.
Технико-экономические преимущества кантователя заключаются в том, что он позволяет осуществлять как кантовку, так и перекладку с одной позиции на другую (разбраковку) листов без кантовки, т.е. проводить обе
Q 5 о 5
0
5
19 J
операции как совместно, так и независимо одна от другой.
Формула изобретения
1.Кантователь листов, включающий рычаги с грузозахватной траверсой, установленные на осях, привод кантовки траверсы, отлича.ющийся тем, что, с целью расширения технологических возможностей и повышения производительности путем совмещения
в одном устройстве операций кантовки и перекладки листов, он снабжен передаточным механизмом, выполненным в виде зубчатых колес, установленных на осях рычагов и грузозахватной траверсы, кинематической связи между ними и привода, при этом колесо, смонтированное на оси рычага, установлено свободно, а -привод- - стационарно.
2.Кантователь по п.1, о т л и- чающийся тем, что кинематическая связь выполнена в виде гибкой бесконечной цепи.
3.Кантователь по п.1, отличающийся тем, что кинематическая связь выполнена в виде реечной передачи.
4.Кантователь по п.1, отличающийся тем, что кинематическая связь выполнена в виде набора зубчатых колес,, число которых нечетно.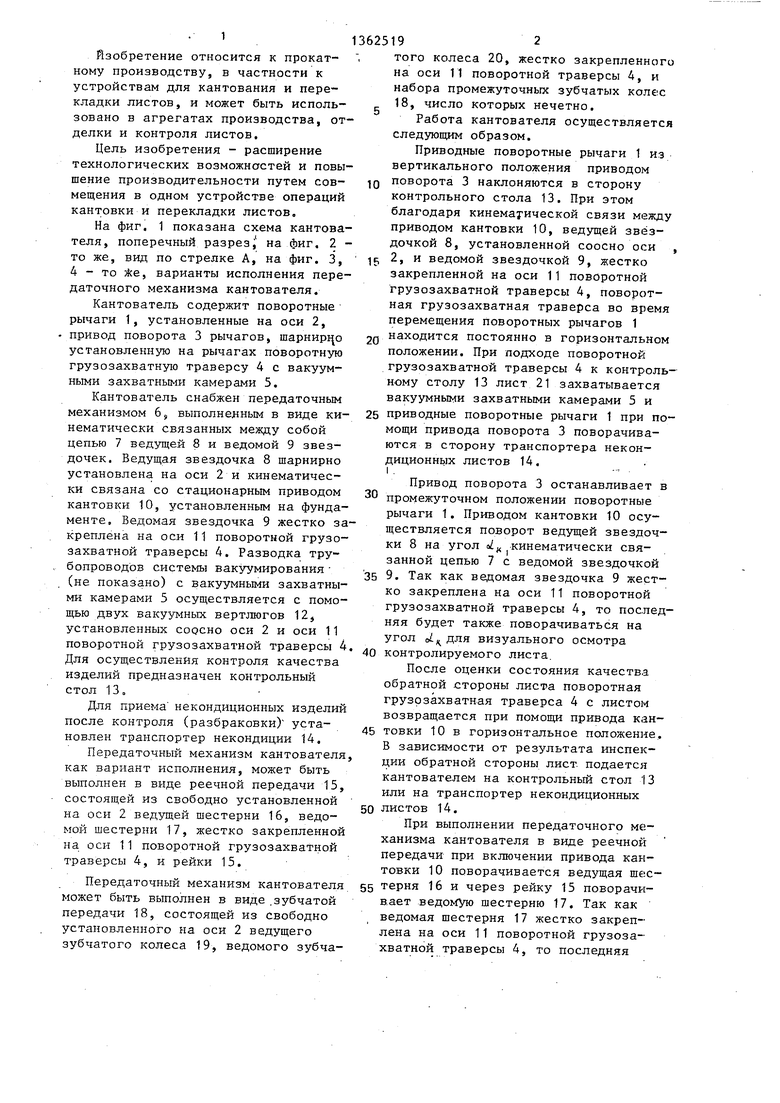
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Автоматизированный комплекс для многопереходной листовой штамповки | 1982 |
|
SU1015984A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Кантователь металлоконструкций под сварку | 1988 |
|
SU1532260A1 |
| Грузозахватное устройство | 1989 |
|
SU1749149A1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Устройство для перекладки изделий | 1977 |
|
SU650948A1 |
| КАНТОВАТЕЛЬ ЛИСТОВ | 1968 |
|
SU217340A1 |
| Захват-кантователь | 1990 |
|
SU1782912A1 |
| КАНТОВАТЕЛЬ | 2009 |
|
RU2392216C1 |
Изобретение относится к области прокатного производства, в частности к устройствам для кантования и перекладки листов, и может быть использовано в агрегатах производства, отделки и контроля листа. Цель изобретения - расширение технологических возможностей и повышение производительности путем совмещения в одном устройстве операций кантовки и перекладки листов.V Кантователь снабжен передаточным механизмом 6, взаимодействующим с поворотной грузозахватной траверсой 4 и приводом кантовки 10. В процессе работы кантователя благодаря кинематической связи в виде бесконечной цепи между приводом кантовки 10, ведущей звездочкой 8, свободно установленной на оси 2, и ведомой звездочкой 9, жестко закрепленной на оси 11, грузозахватная траверса во время перемещения поворотных рычагов 1 находится в горизонтальном положении. При подходе-траверсы 4 к контрольному столу 13 лист 21 захватывается вакуумными захватными камерами 5, и приводные поворотные рычаги 1 при помощи привода поворота поворачиваются в сторону транспортера некондиционных листов 14. 3 3.п. ф-лы, 4 ил. & (f) Вид а Фиг. г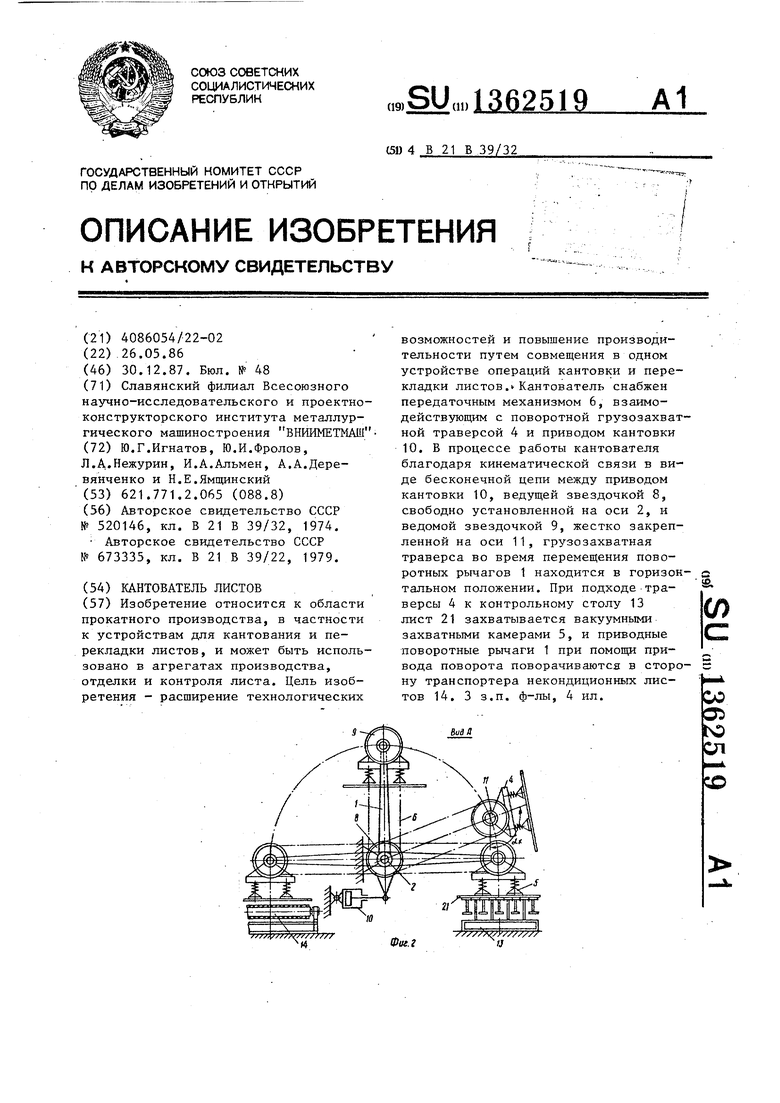
| Устройство для кантовки листового проката и плоских изделий | 1974 |
|
SU520146A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кантователь листов | 1976 |
|
SU673335A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
