Изобретение относится к управлению приводом рабочего органа одноковшового погрузчика, оснащенного системами автоматического управления процессом зачерпывания или копания, и предназначено для использования в горнодобывающей, строительно и других областях народного хозяйств Известно устройство для автоматического управления рабочим процессом погрузочных Мёцаин с гидравлическим приводом, содержащее датчики, расположенные на платформе машины, гидр приемник и распределитель, управляющи1 работой цилиндра подъема ковша. Причем в качестве датчика в нем используется гидроцилиндр, шток кото рого воспринимает нагрузку, пропорц ональную реакции штабеля на ковш 11. Недостатком этого привода является то, что он имеет небольшую надежнорть, так как гидравлическая система имеет много точек соединения в гидромагистралях, неплотности манжет, зазоры между з.олотником и корпусом в распределителях, что способствует утечке жидкости. Наличие подвижных деталей и грубая регулировка также снижает надежность работы гидропривода, требующего специальной отладки. Кроме того, гидравличес кие узлы унравлення являются громрздкими. Наиболее близким по технической cyutHOCTH к изобретению является гидр привод ковшового погрузчика, содержа щий гидроцилиндр подъема стрелы. соединенный с выходом распределителе подъема стрелы, гидроцилин поворота ковша, соединенный с выходо распределителя поворота ковша, датчик давле;ния гищ оцилиндра подъема стрелыС21. Недостатке известного привода яв ляется то, что рабочим телом являетс жидкость, которая требует постоянной и тщательной очистки от посторонних примесей, например, путем фильтрации а также нгишчие утечки жидкости в за зорах гидpaвJШчecкиx узлрв и соединениях в гидромагистралях; что Снижа ет надежность привода. Грубая регулировка, присутствие подвижных деталей в элементах управления также сни жает его надежность. Нсипичие гидравлических узлов управления супественио увеличив ает габарит привода, его громоздким. , Целью изобретения является Повышение нещежности. Указанная цель достигается тем, что привод ковшового погрузчика, содержащий гидррцилинцр подъема стрелы сое аинениый с выходом распределителя подъема стрелы/ гидроцилинд) поворота ковша, соединенный с выходом ра.спределителя поворота ковша,датчик давления гидроцилиндра подъема стрелы снабжен датчиком давления гидроцилиндра поворота ковша, формирователем программы поворота ковша, и вторым усилителями тока, первым и вторым коммутаторами и командным блоком, соединенным первым входом с выходом датчика давления гидроцилиндра поворота ковша, вторым и третьим входами соответственно с первым и вторым выходами датчика давления, гидроцилиндра подъема стре-- лы, .. первым выходом через формирователь программы поворота ковша, первый усилитель тока и первый.коммутатор с входом распределителя поворота , ковша, вторым выходом через вторбй усилитель тока и второй коммутатор с входом распределителя подъема стрелы. : . На чертеже приведена комбинированная схема привода ковшового погрузчика.Привод содержит гидроцилиндр 1 подъема стрелы, гидроцилиндр 2 поворота ковша, связанные с основными распределителями 3 и 4 подъема стрелы и поворота ковша соответственно. В поршневой полости гидроцилиндра 1 стрелы размещен датчик 5 давления гидроцилиндра подъема стрелы, преобразующий давление жидкостей в электрический сигнал, а в штрковой полости гидроцилиндра 2 поворота ковша размещен датчик 6 давления гидроцилиндра поворота ковша. Датчик 5 имеет два (пропорциона Пэно количеству вы-, даваемых сигналов выходфа дат- . чик б - один выход.С каждого из . выходов снимается по два сигнала при различных уровнях давления жидкости в соответствующих гидроцилиндрахл Выходы датчиков 5 и б связаны с входами командного блока 7, первый выход которого подключен к последовательно соединенным между собой фоЕжи)рователем 8 програшш поворота ковша, первым усилителем тока 9 и первым кок1мутаторс 1 10, второй выход к последовательно соединенным вторым усилителем тока 11 и вторьш коммутатором 12. Выходы коммутаторов 10 и 12 соединены с электромагнитами 13 распределителей поворота ковша 4 и : подъема стрелы 3. Дривсхд ковшового погрузчика, работает апЕедукпфнм образсж. Перед началом внедрения ковша riштабель стрела опускается на раму или ковш на почву. При этсм давление жидкости в пориневой полости гидроцилиидра 1 подъема стрелы, где установлен датчик 5, устанавливается равным нулю. С датчика 5 поступает Сигнал О на командный блок 7, кото1%1й выдает на подъем Стрелы. Далее сигнал, усиленный усилителем 11 тока, поступает на коммута-лор 12, нагрузкой которого сложит электромагнит 13 распределителя 3. Стрела поднимается. Давление в поршневой полости гидроцилиндра 1 стрелы расте до давления Pi, соответствующего массе пустого ковша со стрелой. При давлении Р1 от датчика 5 на командный блок 7 поступает сигнал на п-рекращение подъема стрелы. Подъем прекращается. Стрела приподнята над рамой (КОВШ - над почвой на 1-3 см. Такое состояние.устройства является исходным для осуществления авто матического управления зачерпыванием При перемещении машины ковш внедряется в штабель, и жидкость в гидроцйлиндре 1 оказывается под дав лением, пропорциональным усилию внед рения. Внедрение ковша в штабель уве личивает давление впоршневой полости гидроцилиндра 1 стрелы до величины Р2, соответствующей режиму, близкому к буксованию колес, при котором от датчика 5 на вход командного блока 7 выдается сигнал на фо{ 4ирователь 8 программы поворота ковша. Затем сигнал упра вленйя, усиленный усилителем 9 тока, поступает на кс «мутатор 10, нагрузкой которого явЛяется электромагнит 13 распределителя 4, который переключает распреде литель 4, управляющий работой гидроцилиндра 2 поворота ковша при зачерпывании. Формирователь 8 программы задает скорость ступенчатого поворота ковша по программе, не доводя; машину до режима буксования. .В конце зачерпывания, когда выбирается полностью угол поворота ковша, давление в штоксвой полости гидроцилиндра 2 ковша увеличивается до соответствующего давления РЗ., близкого .к давлению срабатывания предохранительного клапана всего гидропривода. При этом уровне давления с датчика 6 снимается сигнал на пре;кращениё работы гидроцилиндров 1 и 2 и подается на соответствунвдий вход командного блока 7, который выдает команду на блокировку работы гидроцилиндров 1 и 2i Описанный привод обладает высокой надежностью за счет использования в формирователе команд высоконадежных элементов схемы управления - полупроводниковых приборов и ци44: рвых микросхем, а также исключает режим буксования, снижает из HOC дорогостоящих шин, более простой в изготовлении, так как исключаются гидравлические элементы блока управления, сложные при изготовлении/ высокой производительностью за счет режима зачерпывания, задаваемого выбранной програ1имой, учитывающей изменение условий грунта, что положительно отражается на заполнении ковша. Применение полупроводниковых приборов и интегральных микросхем позволило значительно уменьшить габаритные размеры и массу привода. Кроме того, данный привод позволяет автоматизировать работу гидроцилиндров стрелы и ковша при дистанционном управлении, что облегчит работу оператора особенно в условиях, когда не видно набираемую массу.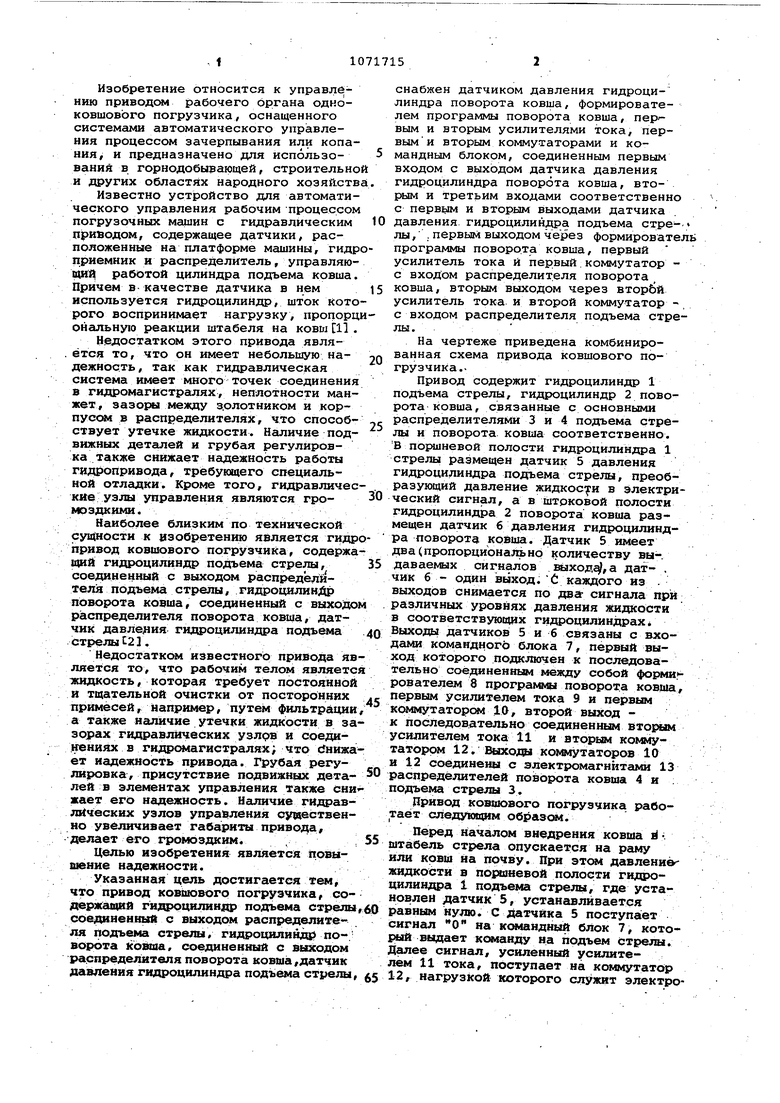
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод ковшового погрузчика | 1980 |
|
SU905396A1 |
| Гидропривод ковшового погрузчика | 1979 |
|
SU1273463A1 |
| Система управления рабочим процессом погрузчика | 1985 |
|
SU1355679A1 |
| ФРОНТАЛЬНЫЙ ПОГРУЗЧИК С ЭНЕРГОСБЕРЕГАЮЩИМ ГИДРОПРИВОДОМ ПОГРУЗОЧНОГО ОБОРУДОВАНИЯ | 2005 |
|
RU2306389C2 |
| Гидропривод фронтального погрузчика | 1986 |
|
SU1583553A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
| Гидропривод фронтального погрузчика | 1983 |
|
SU1126669A1 |
| Ковшовый погрузчик | 1977 |
|
SU705082A1 |
| Гидравлическая система погрузчика | 1981 |
|
SU962197A1 |
| Гидропривод управления рабочим оборудованием фронтального погрузчика | 1987 |
|
SU1490235A1 |
ПРИВОД КОВШОВОГО ПОГРУЗЧИКА, . содержащий гидроцилиндр подъема стрелы, соединенный с выходом распределителя подъема стрелы,.соединенный с выхода распределителя подъема стрелы, гидроцилиндр поворота ковша, соединенный с выходом распределителя поворота ковша, датчик давления гидроцилиндра подъема стрелы, о т л и ч аю щ и и с я тем, чтоу с целью повышения надежности, он снабжен датчиком давления гидроцилиндра поворота ковша , формирователем программы поворота ковша, первым и усилителями тока, первым и вторым коммутаторами и командным блоком, соединенным iiepвым входом с выходом датчика давления гидроцилиндра поворота ковша, втЫялм и третьим входами соответственно б первьв и вторым выходами датчика давления гидроцилин фа подъема стрелы, первым выходом через формиров атель программы поворота ковша, первый Усилитель тока и первый кo yтaтop с входом распределителя поворота ковша, вторым выходом через второй уси(Л литель тока и второй кокмутатор с входом распределителя подъема стрелы. о 1 W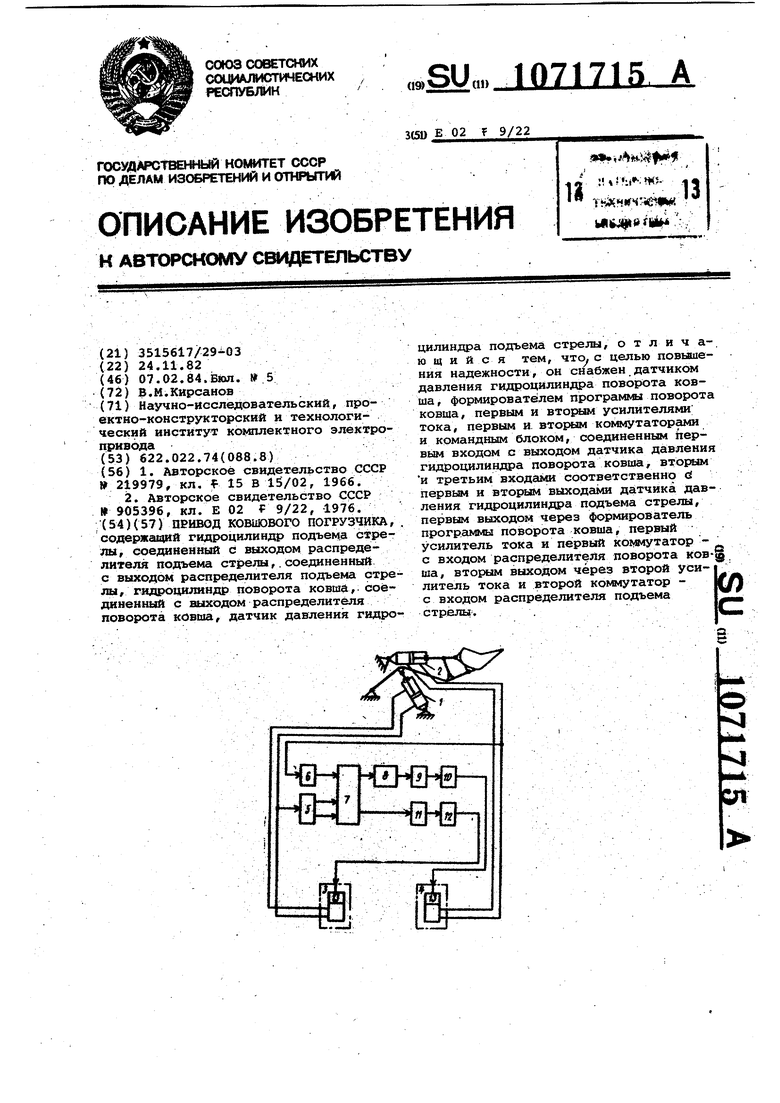
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 0 |
|
SU219979A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гидравлический привод ковшового погрузчика | 1980 |
|
SU905396A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
