Изобретение относится к машиносрое11кк),в частности к устройствам для перемещения штучных грузов с одной позиции другую.
Известен автооператор, содержащий корпус, установленный на вертикальной направляющей, расположенные в корпусе механизм фиксации и механизм подъема и горизонтального перемещения, выполненный в виде зубчатого колеса и взаимно перпендикулярных реек, одна из которых соединена со щтоком силового цилиндра, а другая - с захватом 1.
Недостатком известного устройства является то, что механизм фиксации горизонтальной рейки, выполненный в виде пружины, ограничивает ход горизонтальной рейки и грузоподъемность устройства.
Цель изобретения - расщирение технологических возможностей.
Для достижения цели в автооператоре, содержащем корпус, установленный на вертикальной направляющей, расположенные в корпусе механизм фиксации и механизм подъема и горизонтального перемещения, выполненный в виде зубчатого колеса и взаимно перпендикулярных реек, одна из которых соединена со штоком силового цилиндра, а другая - с захватом, механизм фиксации выполнен в виде кулачкового валика и подвижных упоров, расположенных в корпусе параллельно зубчатым рейкам, причем кулачковый валик установлен в корпусе с возможностью взаимодействия с горизонтальной рейкой и вертикальной направляющей, а подвижные упоры имеют возможность взаимодействия как с кулачковым валиком, так и с подвижными элементами автооператора.
На фиг. 1 изображен автооператор, общий вид; на фиг. 2 - сечение-А-А на фиг. 1.
Устройство сосоит из корпуса 1, в котором установлен механизм подъема и горизонтального перемещения, выполненный в виде взаимно перпендикулярных горизонтальной 2 и вертикальной 3 реек. Горизонтальная рейка находится в зацеплении с шестерней 4, а вертикальная - с щестерней 5, насаженными на общий вал 6. Параллельно горизонтальной рейке установлена направляющая 7, которая соединяется с горизонтальной рейкой с одной стороны траверсой 8, а с другой - захватом 9. Вертикальная рейка 3 соединена со щтоком 10 силового цилиндра 11. Параллельно оси силового цилиндра 11 в корпусе 1 установлена, вертикальная направляющая 12. Механизм фиксации горизонтальной рейки 2 выполнен в виде установленного в. корпусе 1 кулачкового валика 13 с секторами 14 и 15. На горизонтальной рейке 2 выполнена прорезь 16, а на вертикальной направляющей 12 выполнена прорезь 17. Для поворота кулач0 кового валика 13 предназначены подвижные упоры 18 и 19. Кулачковый валик фиксируется фиксатором 20.
Автооператор работает следующим образом.
В исходном положении корпус 1 находится в нижнем положении при котором щток 10 силового цилиндра 11 с закрепленной рейкой 3 выдвинут. Кулачковый валик 13 установлен так, что находясь в зацеплении с рейкой 2, стопорит ее выдвиже0 ние с захватом 9. Фиксатор 20 фиксирует положение кулачкового валика 13. Г1ри включении силового цилиндра 11 шток 10 с рейкой 3 поднимается вверх. Движение передается через зубчатое колесо 5 и застопоренную рейку 2 на корпус 1. Корпус 1
5 поднимается вверх, сектор 14 кулачкового валика 13 этому не препятствует. В крайнем верхнем положении упор 19 нажимает на кулачковый валик, который поворачивается так, что он входит в зацепление с прорезью 17 вертикальной направляющей 12 и
0 освобождает сектором 15 рейку 2. Движение от рейки 3 передается через зубчатые колеса 5 и 4 на рейку 2, и происходит горизонтальное перемещение захвата 9 с деталью до окончания движения щтока 10.
При движении штока 10 силового цилиндра 11 с рейкой 3 в обратном направлении, рейка 2 с разгруженным захватом 9 возвращается и торцовой частью захвата 9 нажимает на упор 18. Нажатие упора 18 поворачивает кулачковый валик 13 так, что он
0 входит а прорезь 16 рейки 2 и сектором 14 освобождает вертикальное перемеи1ение. Движение передается через рейку 3, зубчатые колеса 4 и 5, застопоренную рейку 2 на корпус 1, перемещая его в нижнее исходное положение.
5 Использование изобретения позволяет увеличить грузоподъемность и зону действия автооператора.
5
3 Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения материала | 1987 |
|
SU1447493A1 |
| Автооператор | 1978 |
|
SU835707A1 |
| Стенд для сборки и обжатия уплотнительных муфт с воздуховодными трубками | 1982 |
|
SU1050846A1 |
| Автооператор | 1987 |
|
SU1465249A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Устройство для открывания и закрывания крышек люков полувагонов | 1981 |
|
SU948724A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| Устройство для осуществления двух независимых вращательных движений оптических деталей | 1974 |
|
SU533992A1 |
| Автооператор | 1976 |
|
SU650780A1 |
| Автомат для изготовления радиаторных пластин и сборки радиаторов | 1960 |
|
SU133457A1 |

АВТООПЕРАТОР, содержащий корпус, установленный на вертикальной направляющей, расположенные в корпусе механизм фиксации и механизм подъема и горизонтального перемещения, выполft-:3-fe-cz:Jj ненный в виде зубчатого колеса и взаимно перпендикулярных реек, одна из которых соединена со штоком силового цилиндра, а другая - с захватом, отличающийся тем, что, с целью расширения технологических возможностей, механизм фиксации выполнен в виде кулачкового валика и подвижных упоров, расположенных в корпусе параллельно зубчатым рейкам, причем кулачковый валик установлен 8 корпусе с возможностью взаимодействия с горизонтальной рейкой и вертикальной направляющей, а подвижные упоры имеют воз.можность взаимодействия как с кулачковым валиком, так и с подъемными элементами автооператора. Фиг. 2 8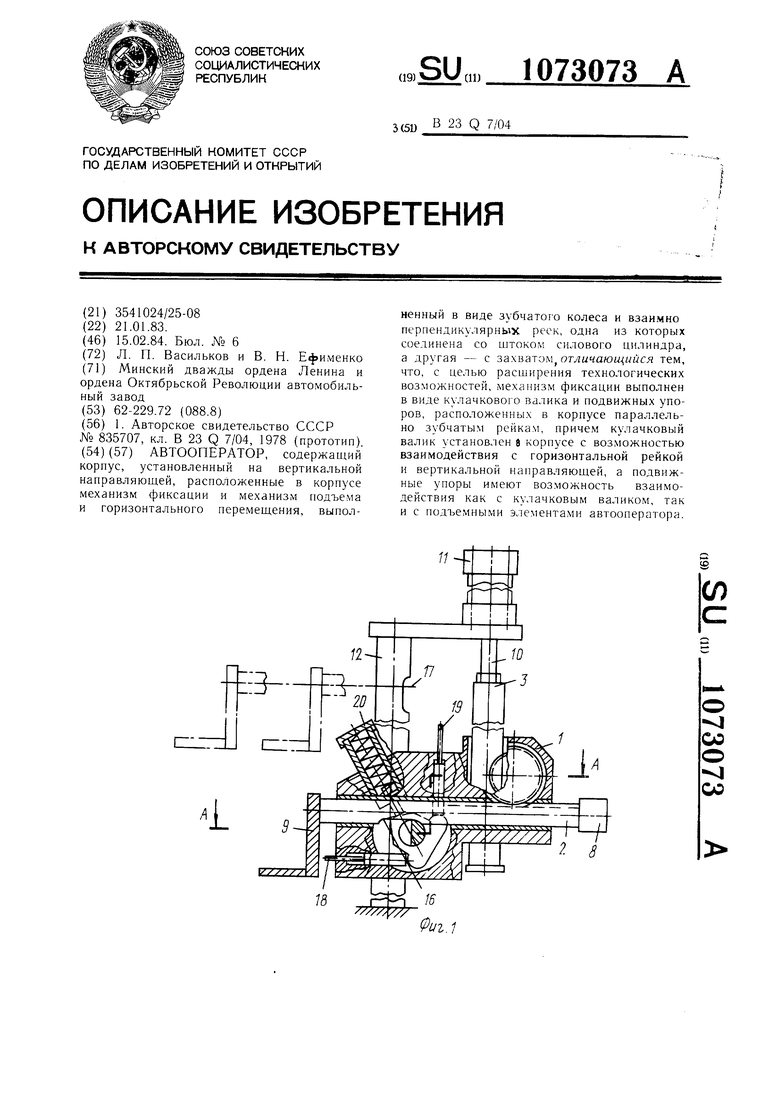
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автооператор | 1978 |
|
SU835707A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
