1
Изобретение относится к машиностроению, в частности к устройствам для перемещения штучных грузов с одной позиции на другую.
Известен автооиератор, содержащий корпус с установленным в нем механизмом подъема и горизонтального перемещения, выполненным в виде зубчатого колеса и взаимно перпендикулярных реек, одна из которых соединена со щтоком силового цилиндра, а другая - с захватом 1.
Недостатком известного устройства является большое количество приводов, что усложняет его конструкцию.
Цель изобретения - упрощение конструкции автооператора.
Для этого он снабжен пружиной, установленной в ступице зубчатого колеса и закрепленной в ней одним концом, а другим концом соединенной с корпусом, тягой, установленной на корпусе параллельно оси силового цилиндра, упором, смонтированным на корпусе силового цилиндра, и регулируемым упором, установленным на штанге с возможностью его взаимодействия с упором, смонтированным на корпусе силового цилиндра.
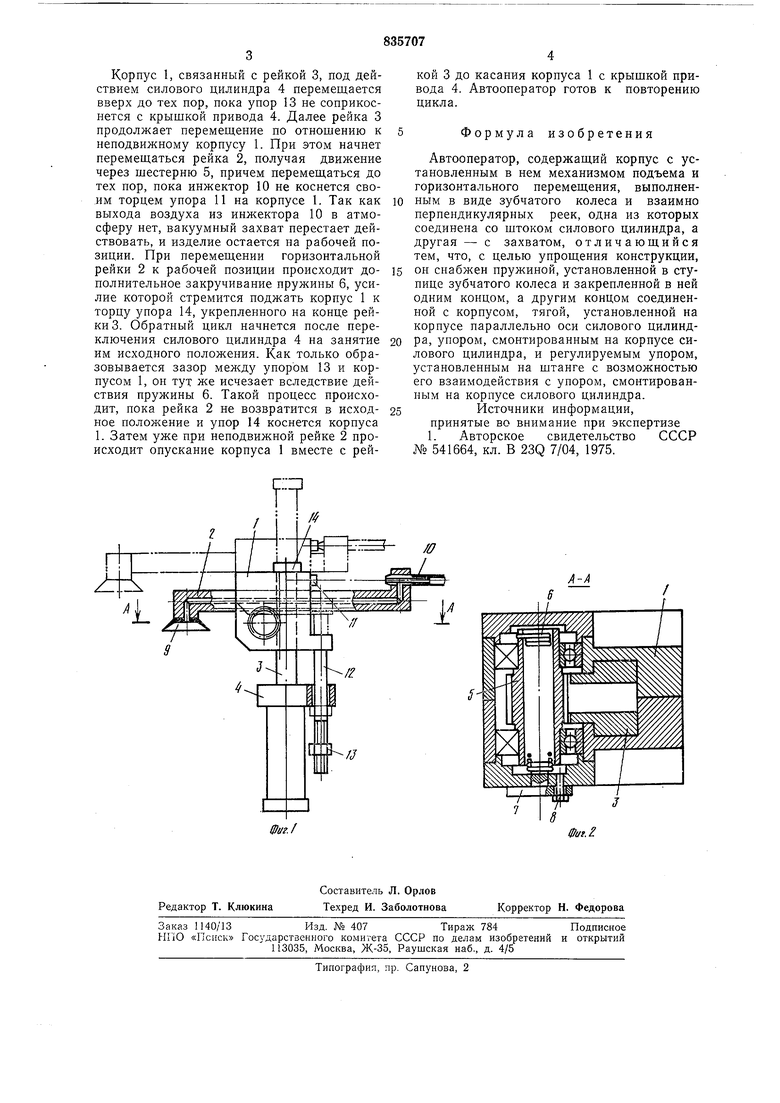
На фиг. 1 дана принципиальная схема автооператора (исходное положение автооператора показано основными линиями, а конечно - пунктирными); на фиг. 2 - разрез А-А фиг. 1.
Автооператор содержит корпус 1, в котором расположены перпендикулярно друг к другу горизонтальная рейка 2 и вертикальная рейка 3, силовой цилиндр 4 шестерня 5, которая одновременно находится в зацеплении с рейками 2 и 3. Рейка 3 соединена со щтоком силового цилиндра 4. Внутри шестерни 5 установлена пружина 6, один конец которой закреплен в ступице шестерни 5, а другой - в крышке 7 корпуса 1, угловое положение которой может меняться относительно продольной оси шестерни 5 за счет наличия в торце корпуса 1 отверстий и фиксирующего болта 8. На одном конце горизонтальной рейки 2 смонтирован вакуумный захват 9, соединенный внутренним каналом с инжектором 10 в конце рабочего хода рейки 2, контактирующим своим выходным отверстием с упором 11, укрепленным на корпусе 1. Через крышку силового цилиндра 4 проходит тяга 12 с регулируемым упором 13, а на конце рейки 3 смонтирован упор 14. Усилие пружины 6 направлено так, что оно стремится поджать корпус 1 к торцу упора 14.
Автооператор работает следующим образом.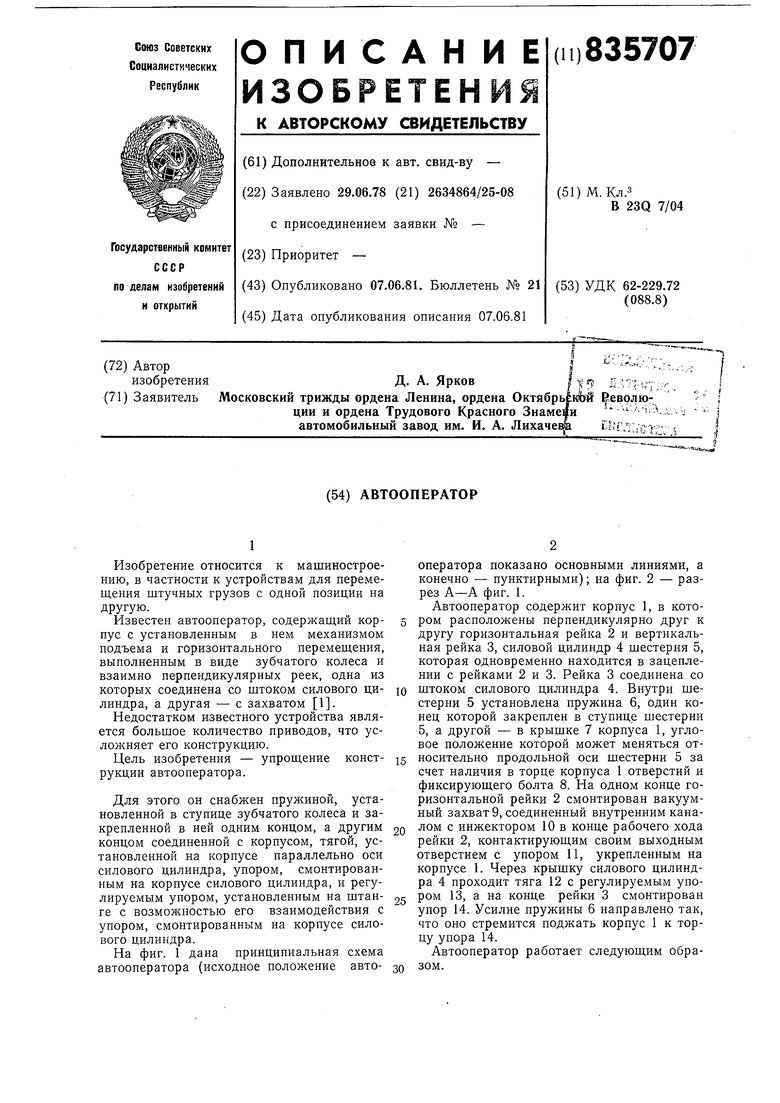
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1983 |
|
SU1073073A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Устройство для резки труб | 1986 |
|
SU1375414A1 |
| АВТООПЕРАТОР | 1973 |
|
SU386747A1 |
| Способ штамповки деталей из полосового материала и установка для его осуществления | 1987 |
|
SU1586826A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Промышленный робот | 1981 |
|
SU1042992A1 |
| Устройство для хранения и подачи бортовых крыльев покрышек пневматических шин | 1980 |
|
SU871409A1 |
| Захват | 1980 |
|
SU905061A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
