нен в виде диска с разными вырезами с ними кромками, а с двумя спиралеоб- ны каждого конца внлкисвободио устазаостренными верх- новлены на осях поворотные в вертикальвнутренней сторо- ной плоскости и подпружиненные упоры. 1077205 


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обвязки мотков проволоки и пачек прутков | 1984 |
|
SU1219460A1 |
| Устройство для обвязки предметов | 1982 |
|
SU1068341A1 |
| Устройство для намотки и обвязки бунтов длинномерного материала | 1983 |
|
SU1204287A1 |
| МАШИНА ДЛЯ ОБВЯЗКИ ПРОВОЛОКОЙ КОНЦОВ ШПАЛ | 2006 |
|
RU2324631C1 |
| Устройство для обвязки кольцеобразных предметов | 1986 |
|
SU1330012A1 |
| МАШИНА ДЛЯ ОБВЯЗКИ ПРОВОЛОКОЙ КОНЦОВ ШПАЛ | 2005 |
|
RU2302360C2 |
| Устройство для скручивания концов обвязочной проволоки | 1983 |
|
SU1111947A1 |
| Способ обвязки рулонов на барабанеМОТАлКи и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU831666A1 |
| Устройство для пакетирования и обвязки пачек длинномерных изделий | 1986 |
|
SU1330011A1 |
| Устройство для обвязки изделий проволокой | 1985 |
|
SU1261843A1 |
1. УСТРОЙСТВО ДЛЯ ОБВЯЗКИ МОТКОВ ПРОВОЛОКИ ИЛИ ПАЧЕК ПРУТКОВ, содержащее механизм подачи обвязочного материала, отрезной механизм с подвижным и неподвижным ножами, механизм гибки обвязочного материала, включающий вилку, закрепленную на штоке привода ее возвратно-поступательного перемещения в вертикальной плоскости, и размещенный под вилкой механизм-скрепления концов обвязочного материала, включаюпщй поворотный элемент, отличающееся тем, что, с целью повышения надежности обвязки путем исключения возможности смещения витков обвязочного материала при транспортироваНИИ и перекладывании мотков или пачек, оно снабжено механизмом прошивки, вьтолненным в виде оснащенной приводом возвратно-поступательного перемещения в направлении, пересекающем направление перемещения вилки, полой иглы, закрепленной на провод- , ке, состоящей не менее чем из двух телескопических связанных полых элементов, из которых внутренний соединен с механизмом подачи обвязочного материала, а наружный - с иглой и ее приводом, при этом вилка механизма гибки выполнена-с возможностью поворота вокруг своей оси на 180 при движении в одном направлении а на концах зубьев вилки выполнены соосно расположенные отверстия для прохода иглыо 2.Устройство по п. 1,.о т л иi чающееся тем, что шток привода вилки механизма гибки обвязоч(Л ного материала размещен во втулке, зафиксированной от проворота при этом на штоке выполнены расположенные диаметрально противоположно пазы, включающие по два прямолинейных участка, соединенных двумя винтовыми участками, а во втулке установлены с возможностью перемещения в пазах штока ролики. 3.Устройство по п. 1, отличающееся тем, что подвижный нож отрезного механизма смонтирован на ггодпружиненном рычаге, при этом рычаг и неподвижный нож установлены в полости элемента проводки, соединенного с иглой, а рычаг выполнен желобообразным и установлен с возможностью взаимодействия со штоком силового цилиндра, закрепленного Аад проводкой, 4.Устройство по п. t, отличающееся тем, что поворотный элемент механизма скрепления концов обвязочного материала выпол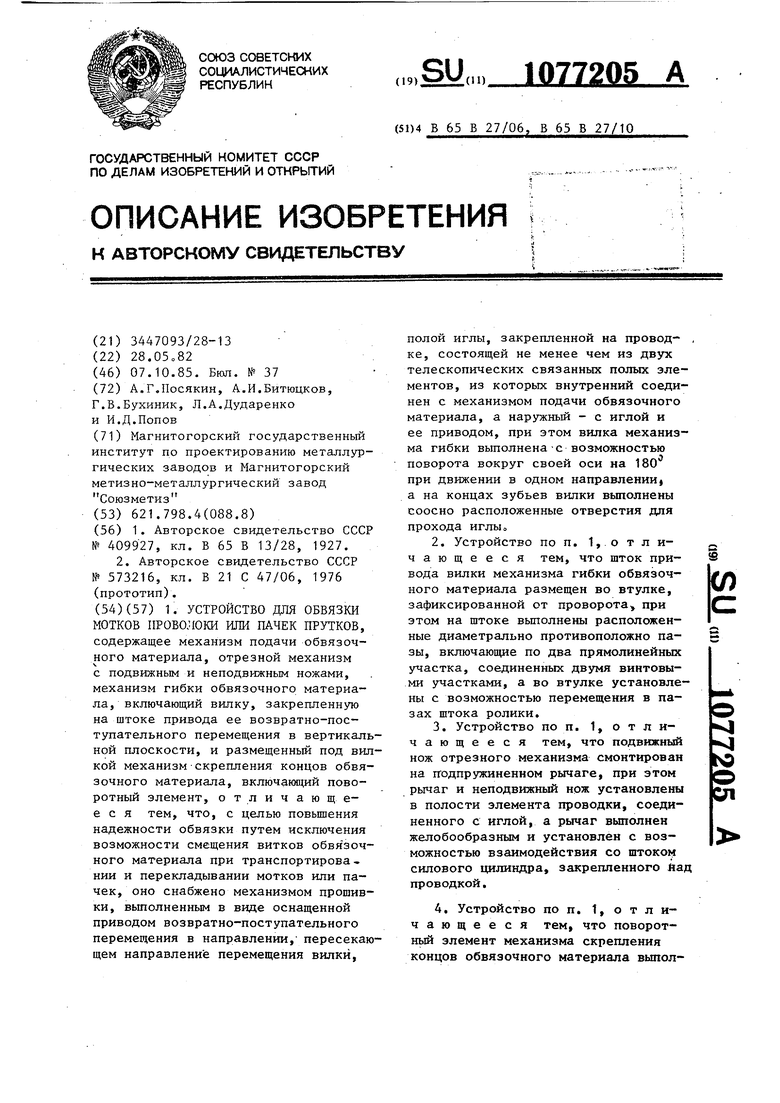
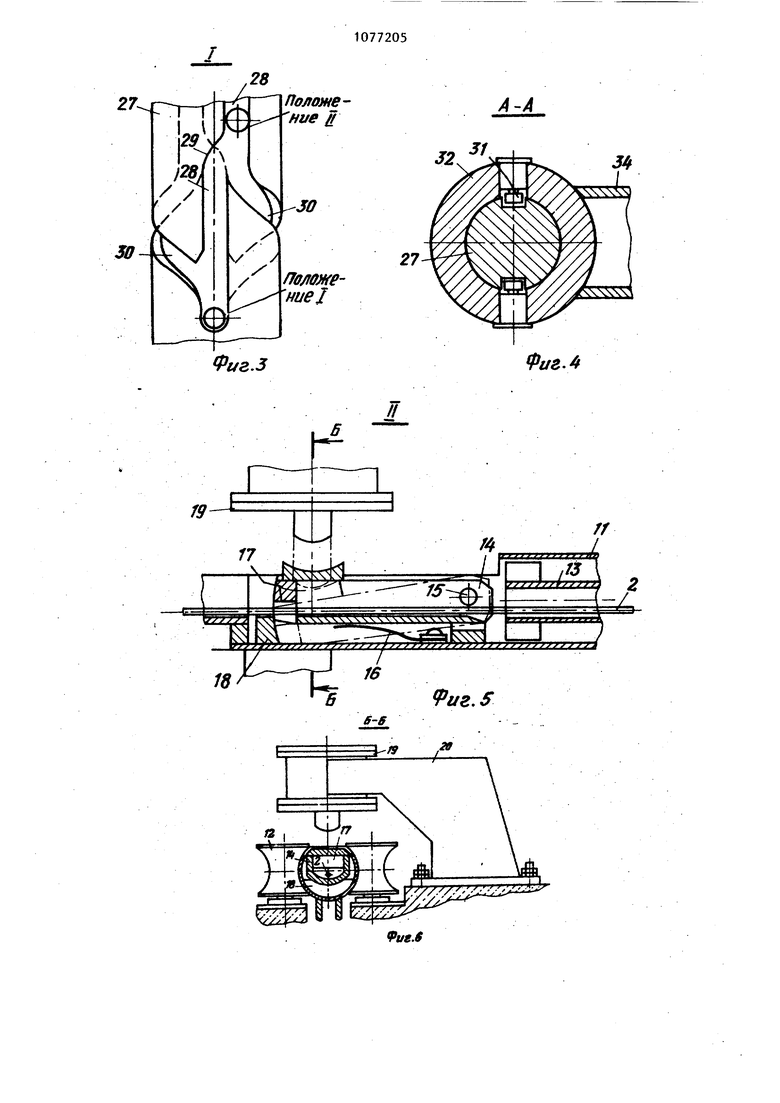
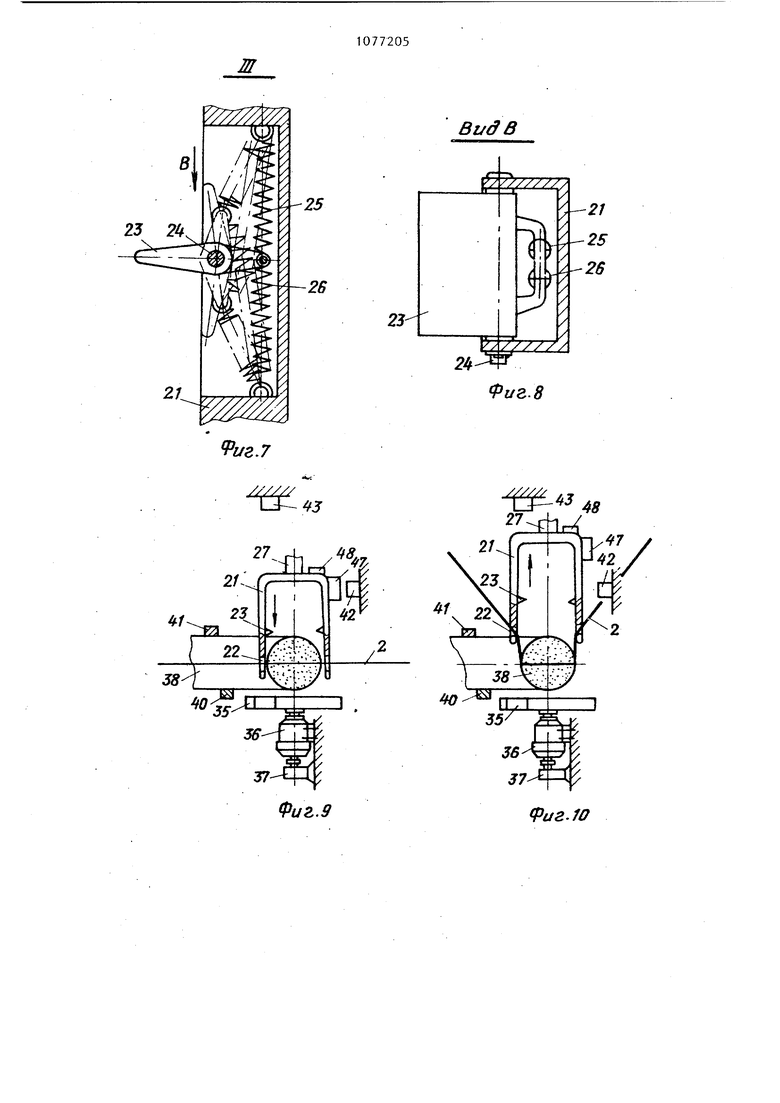
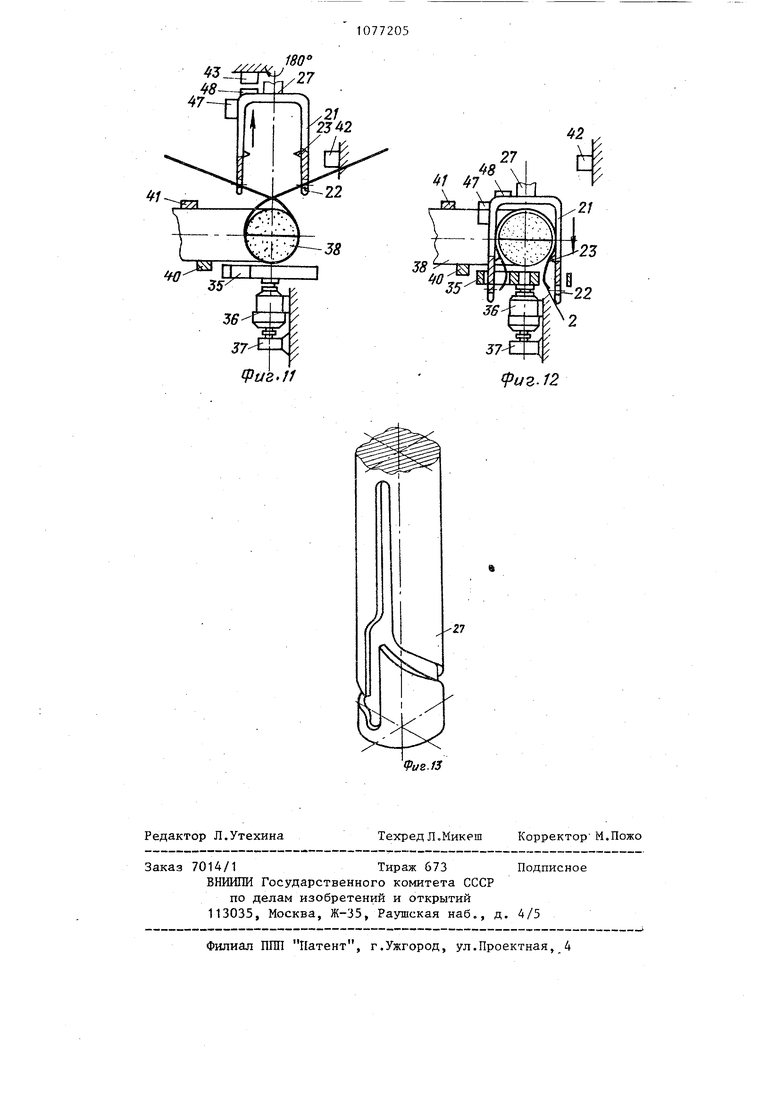
Изобретение относится к области упаковки, а более конкретно к устройствам для обвязки готовой продукции металлопроката. Известно устройство для обвязки проволокой прутков, содержащее вязальную головку lj . Известно также устройство для обвязки мотков проволоки или паче-к прутков, содержащее механизм подачи обвязочного материала, отрезной механизм с подвижным и неподвижным ножами, механизм гибки обвязочного материала, включаюп1ий вилку, закреп ленную на штоке привода ее возвратн поступательного перемещения в верти кальной плоскости, и размещенный под вилкой механизм скрепления концов обвязочного материала, включающий поворотньй элемент 2 . Недостатком известного устройств является то, что осуществляемая на нем обвязка, несмотря на плотную за тяжку, не исключает возможности сме щения витков обвязочного материала по поверхности мотка или пачки. Это снижает надежность обвязки. Целью изобретения является повышение надежности обвязки устройство для обвязки мотков проволоки или па чек прутков путем исключения возмож ности смещения витков обвязочного м териала при транспортировании и перекладывании мотков или пачек. Для достижения данной дели устро ство для обвязки мотков проволоки или пачек прутков, содержащее механизм подачи обвязочного материала, отрезной механизм с подвижньм и неподвижным ножами, механизм гибки обвязочного материала, включающий вилку, закрепленную на штоке привод ее возвратно-поступательного переме ния в вертикальной плоскости, и раз мещенный под вилкой механизм скрепления концов обвязочного материала, включающий поворотный элемент, снабжено механизмом прошивки, выполненным в виде оснащенной приводом возвратно-поступательного перемещения в направлении, пересекающем направление перемещения вилки, полой иглы, закрепленной на проводке, состоящей не менее чем из двух телескопически связанных польгх элементов, из которых внутренний соединен с механизмом подачи обвязочного материала,- а наружньй - с иглой и ее приводом, при этом вилка механизма гибки выполнена с возможностью поворота вокруг своей оси на 180 при движении в одном направлении, а на концах зубьев вилки выполнены соосно расположенные отверстия для прохода иглы. Шток привода вилки механизма гибки обвязочного материала может быть размещен во втулке, зафиксированной от проворота, при этом на штоке выполнены расположенные диаметрально противоположно пазы, включающие по два прямолинейных участка, соединенных двумя винтовыми участками, а во втулке установлены с возможностью перемещения в пазах штока ролики. Подвижный HO5S отрезного механизма может быть смонтирован на подпружиненном рычаге Рычаг и неподвижный нож установлены в полости элемента проводки, соединенного с иглой, а рычаг вьтолнен желобообразным и уста- . новлен с возможностью взаимодействия со штоком силового цилиндра, закрепленного над проводкой. Поворотный элемент механизма скрепления концов обвязочного материала может быть выполнен в виде диска с двумя спиралеобразными вырезами с заостренными верхними кромками, а с внутренней стороны каждого конца вилки свободно установлены на осях поворотные в вертикальной плоскости и подпружиненные упоры. На фиг, 1 показано устройство для обвязки мотков проволоки или пачек прутков, общий вид (штрих-пунктирной линией показаны крайние положения подвижных частей механизмов); на фиг. 2 - то же, вид в планер на фиг. 3 - узел I фиг. 1, на фиг. 4 - разрез А-А фиг. 1, на фиг. 5 - узел II фиг. 1; фиг. 6 разрез Б-Б фиг. 5, на фиг. 7 узел III фиг. 1, на фиг. 8 - вид по стрелке В на фиг. 7, на фиг. 912 показаны положения вилки и обвязочного материала на различных этапах обвязки (стрелками показано направление движения вилки, после которого она занимает положение, показанное на чертеже), на фиг. 13 показана часть штока, привода вилки механизма гибки обвязочного материа ла. Устройство для обвязки мотков проволоки или пачек прутков содержи механизм подачи, который имеет размоточное устройство 1 для размещения проволоки 2 для обвязки, корпус с холостыми правильными роликами 4 1И приводными подающими роликами 5, 1редуктор 6, электродвигатель 7 и ко .мандоаппарат 8. : Механизм прошивки содержит заост ренную иглу 9 в форме желоба и гидроципиндр 10. Игла .9. жестко прикреп лена к наружной трубе 11 телескопической проводки, которая присоедине на к штоку гидроцилиндра 10 и удерживается четырьмя опорными роликами 12. Внутренняя труба 13 телескопической проводки одним концом присоединена к корпусу 3. Отрезной механизм содержит рычаг 14 в форме желоба, установленны в трубе 11 на осях 15 и поджатый пластинчастой пружиной 16. Отрезные пластины 17, 18 с криволинейными поверхностями реза закреплены на ры чаге 14 и трубе 11 соответственно. Привод отрезного механизма - пневмо цнлиндр 19, установленный на фундамент посредством консольной опоры 2 над рычагом 14. Механизм гибки содержит вилку 21 на концах зубьев которой выполнено по одному отверстию 22, размеры которых превышают размеры поперечного сечения иглы 9 приблизительно в два раза. С внутренней стороны концов вилки 21 установлены кулачки 23 на осях 24 с пружинами 25, 26 растяжения. Вилка 21 прикреплена к концу штока 27 привода. На поверхности штока 27 вьшолнены два прямолинейных паза 28 с перегибом 29 паза и два криволинейных винтовых паза 30, переходящие в прямолинейные пазы 28 в месте перегиба 29.В пазы входят два ролика 31 обоймы 32, охватывающей шток 27 по скользящей посадке. Второй конец штока 27 присоединен к штоку гидроцилиндра 33 с возможностью осевого поворота относительно последнего. Обойма 32 и гидроцилиндр 33 смонтированы на общей раме 34, установленной стационарно . Механизм скрепления концов проволоки содержит диск 35, насаженный на вал тихоходного электродвигателя 36, и командоаппарат 37i Диск имеет два спиралевидных сужающихся выреза, верхние кромк которых в зауженной части заострены под углом 90-120 . Обвязываемый моток 38 размещен на поворотном столе (на черт, не .показан) с осью 39 вращения. Стол имеет |уплотняющие рычаги 40, 41. Устройство для обвязки снабжено , бесконтактными (например, типа КВН-15) датчиками 42-46 и регистри-рующими пластинами 47-50 для срабатывания датчиков. Устройство работает следующим образом. В исходном положении механизмы занимают следующее положение (фиг,1, 2). Вилка 21 поднята в крайнее верхнее положение, игла 9 отведена в крайнее правое положение, проволока 2 заправлена в подакяцие ролики 5, И передний конец ее находится возле отрезных пластин 17,-18, моток 38 с прокатным профилем (катанкой) подают в позицию для обвязки с помощью поворотного стола. Импульс ддя начала работы устройства получают либо от датчика наличия бунта, либо от пусковой кнопки пульта управления. Процесс обвязки начинают с опускания вилки 21, При этом шток 27 перемещается относительно обоймы 32 ролики 31 которой обкатываются по прямолинейным пазам 28 и по перегибу 29 из положения I в положение II (фиг. 3). В этот момент пластина 47 приближается к датчику 42 (фиг. 9), последний срабатывает и выдает сигнал на выключение гидроцилиндра 33 для остановки вилки 21, отверстия 2 которой в этот момент располагаются на уровне иглы 9. Выданный датчиком 42 сигнал одновременно является сигналом управления приводом иглы ,9 и приводом подачи проволоки 2, Гидроцилиндр 10 перемещает наружную трубу 11 с иглой 9 в опорных роликах 12, В это же время электродвигатель 7 через редуктор .6 подающими роликами 5 перемещает проволоку 2 по внутренней трубе 13 со скоростью равной скорости перемещения иглы 9, Игла 9 проходит через ближнее отвер стие 22 вилки 21, затем протыкает моток 38, далее проходит через второе отверстие 22 и останавливается вследствие полного выхода штока гид роцилиндра 10- (это положение показа но на фиг. 1 штрих-пунктирной линией). После остановки иглы 9 продолжают подавать проволоку 2, которая скользит по каналу иглы 9, прошивая таким образом моток 38 по его поперечному сечению. После запасовки длины, достаточной для обвязки, подачу обвязочной проволоки прекращают. Сигнал для остановки подающих роликов выдается от командоаппарата 8. Этот же сигнал используют дли отведения иглы 9 в исходное положение. При достижении иглой 9 исходного положения срабатывает датчик 46 от пластины 50 и выдает .сигнал на действие трех исполнитель|ных механизмов: отрезного механизма, механизма гибки, уплотняющих рычагов. При этом шток пневмоцилиндра 19 надавливает на рычаг 14, отрезные пластины перерезают проволоку 2, отрезная пластина 17 возвращается в исходное положение, а рычаг 14 под действием пружины 16 занимает прежнюю позицию, -Уплотняющие рычаги 40, 41 сжимают моток 38 в дву сечениях и удерживают его от перемещения в процессе вязки. Гидроцилиндр 33 начинает перемещать вверх щток - вал 27 с вил.кой в. обойме 32, ролики 31 которой, обкатываясь по криволинейным пазам 30, разворачивают вилку 21 на половину ее полного оборота при достижении крайнего верх него положения. Проволоку 2 таким образом переводят из первоначальной позиции (фиг. 9) во вторую позицию (фиг. 10), В этот момент от пластины 48 срабатывает датчик 43 и выдает сигнал на действие- гидроцилиндра 33, который начинает опускать вилку 21 При этом ролики 31 обкатываются по прямолинейным пазам 28 и с незначительным поворотом направляют КОНЦЕ вилки 21, ас ним и обвязочную проволоку 2 в широкую часть вьфезов поворотного диска 35, который автоматически установлен в нужное положение при помощи командоаппарата 37, При протаскивании проволоки через вьфезы поворотного диска 35 и происходит загиб концов проволоки 2 через края отверстий 22, При дальнейшем движении она натягивается, уплотняет обвязываемое сечение мотка 38, проскальзывает в отверстиях 22 и освобождается в крайнем нижнем положении вилки 21 (фиг, 12). В момент натяжения и проскальзывания относительно концов вилки 21 проволоки 2 последняя своим воздействием разворачивает и утапливает кулачки 23, затем при ослаблении кулачки 23 под действием пружин 25, 26 занимают прежнее положение и выводят загнутые концы проволоки 2 из отверстий 22 (фиг. 12). В крайнем нижнем положении штока 27 с вилкой 21 пластина 49 приближена к датчику 44, который вы дает сигнал на переключение гидроцилиндра для перемещения вилки 21 вверх. Концы проволоки 2 остаются в вьфезах поворотного диска 35. При движении штока 27 с вилкой 21 вверх ролики 31 обкатываются сначала по верхней части прямолинейных пазов 28, затем переходят на криволинейные пазы 30. Поэтому вилка 21 вначале движется вверх без поворота, а затем разворачивается над мотком 38 на половину оборота и занимает исходное положение. Пластина 47 воздействует , на датчик 45, который вьщает сигнал для выключения гидроцилиндра 33 и включения электродвигателя 36 вращения поворотного диска 35 (на фиг.2-, против часовой стрелки). Концы проволоки 2 захватьгеаются заостренными краями зауженной части вырезов и закручиваются. Командоаппарат 37 останавливает электродвигатель 36, включает его на реверс и останавливает его в исходном положении (фиг.2) Концы проволоки 2 освобождаются. В момент остановки поворотного диска 35 командоаппарат 37 выдает сигнал по которому отводятся уплотняющие рьтаги 40, 41,и моток 38 разворачивается вокруг оси 39 на угол 90 , если увязка мотка предусмотрена в четырех местах, или на угол 120 , если в трех местах. Концевые выключатели поворота мотка (на черт, не показаны) осуществляют автоматическую остановку и вьщачу сигнала на начало работы обвязочкого уст1 ойства. При этом все вьшеописанные действия механизмом повторяются .
Фиг. 2 После выполнения последней увязки мотка устройство для обвязки не включается в работу. Указанный моток удаляют (например, общим разворотом стола) , а на его место подводят новый моток. Далее весь цикл обвязки повторяется, как описано вьше. Обвязка мотков проволоки с помощью данного устройства позволяет исключить брак, возникающий вследствие сползания витков обвязочной проволоки и последующего спутывания мотков.. Такие спутанные мотки проволоки идут в металлолом. Вследствие относительно высокой стоимости проволоки применение данного устройства обеспечивает значительный экономический эффект от снижения брака.
Поломе Hue Л
JO
17вложеHueJ
иг.З
А-А
игЛ
Виде
23Риг. 8
VuzJ
иг.9
fpi/s.fff
,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 1972 |
|
SU409927A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для обвязки бухт проволоки | 1976 |
|
SU573216A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
