СХ) 4:
Изобретение относится к автоматичес.ким регуляторам для объектов сЗапаздыванием и может быть использовано, например, при прокатке и гри управлении массивными печами.
Известны регуляторы для объектов с переменным запаздыванием, изменяющие свою структуру tl.
Недостатком этих регуляторов является сложность их реализации.
Наиболее близким к изобретению является регулятор, содержащий последовательно соединенные блок задания, первый сумматор, инерционное звено, первый блок определения модуля, второй блок согласования, третий сумматор, первый релейный элемент, дифференциатор, четвертый сумматор, второй релейный элемент, переключатель, второй сумматор, интегратор, причем с инерционного звена снимается его промежуточная величина, равная производной его выходной величины, она поступает на второй блок определения модуля, выход которого соединен с входом третьего сумматора, еще на один из входов третьего сумматора поступает уставка с первого блока уставки, как и выход второго блока уставки соединен с входом четвертого сумматора, выход первого сумматора соединен с переключателем и через первый блок согласования соединен с.входом второго сумматора 2
Недостатком известного регулятора является сложность схемного решения и, как следствие, недостаточная надежность работы регулятора.
Цель изобретения - повышение . надежности регулятора, упрощение ег схемы.
Поставленная цель достигается тем, что в регулятор для объектов с переменным запаздыванием, содержащий последовательно соединенные блок задания, первый сумматор, инверционное звено, первый блок определения модуля, первый усилитель и второй сумматор, второй вход которого соединен с блоком уставки, а третий вход - с вторым выходом инерци- онного звена, ,а также последовательно соединенные переключатель, сигнальный вход которого через второй усилитель связан с выходом первого сумматора, третий сумматор, второй вход которого через третий усилитель связан с выходом первого сумматора, и интегратор, введен ждущий мультивибратор, вход которого соединен с выходом второго сумматора, а выход - с управляющим входом переключателя .
На чертеже приведена структурная схема регулятора для объектов с переменным запаздыванием.
Регулятор состоит из блока 1 задания, первого сумматора 2, инерционного звена 3, первого блока 4 определения модуля, первого усилителя 5, второго сумматора 6, одновибратора 7, переключателя 8, третьего сумматора 9, интегратора 10, второго блока 11 определения модуля, второго усилителя 12, блока 13 уставки и третьего усилителя 14. 0 Регулятор работает следующим образом.
Пусть из-за изменения задания блоком 1 или каких-либо возмущений сигнал рассогласования с выхода 5 первого сумматора 2 стал по модулю больше с/УрО, т.е.
iet ,
где /3 - коэффициент усиления первого усилителя 5;
- уставка на выходе блока 13. Ошибка регулирования поступает на вход инерционного звена 3, под первым и вторым выходными сигналами которого понимается непосредственно выходной сигнал у инерционного звена 3 и сигнал у, являющийся промежуточной координатой инерционного звена 3. С помощью блока 4
0 определения модуля и усилителя 5 формируется сигнал /i/y/, а с помощью блока 11 определения модуля сигнал /у/. Сигналы /3/у/ и /у/, а также выходной сигнал сЛ о блока
5 формирования уставки 13 суммируются на втором сумматоре 6, образуя сигнал
S /J/y/ - /у/ -о,
0 так как постоянная времени инерционного звена 3 выбирается минимальной, то траектории движения изображающей точки в фазовых пространствах у, У и , е с большой степенью точ5 ности совпадают. Учитывая это, имеем, что при ошибке (, которая еще не отрабатывается исполнительным механизмом, 0 . Отсюда 3 /Ь/у/- (в то время как при
Q ошибке , S 0). Положительный сигнал со второго сумматора б поступает на одновибратор ( ждущий мультивибратор/ 7, который срабатывает, и на его выходе появляется требуемой длительности прямо5 угольный импульс r(t}, который поступает на переключатель 8. С переключателем 8 на первый вход третьего сумматора 9 через второй усилитель 12 поступает сигнал, пропорцио0 нальный ошибке рассогласования - d на время tj, на другой вход сумматора .9 через третий усилитель 14 поступает сигнал €. С выхода третьего сумматора 9 сигнал оС8 +/U.8 пода5 ется на интегратор 10 (для уяснения 3 10784 работы регулятора примем |U. 0 J. Выходная величина интегратора 10 ,и I Ы( t )dt а( tj 05 (поскольку /t/ в малом интервале i времени постоянна). Этот сигнал управления, остается постоянным и воздействует на объект с запаздыванием f через исполнитель-10 ный механизм. При этом /6/ начнет уменьшаться, и, следовательно, . 07« Появление скорости изменения ошибки приводит к перемене знака в сигнале S(S 0). При ,Q /E f-xf/ftX сигнал S вновь изменит знак () и с интегратора будет поступать сигнал управления U g Ы tj + U fj oit + , . Описанный процесс повторяется до тех пор, пока /i/ tSYpi. Изобретение имеет меньшее число блоков, проще в изготовлении, дешев,ле и надежнее в работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор для объектов с переменным запаздыванием | 1976 |
|
SU579597A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Адаптивный регулятор | 1984 |
|
SU1228073A1 |
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| Дозатор непрерывного действия | 1987 |
|
SU1506286A1 |
| Система оптимизации режимов работы объекта | 1989 |
|
SU1636831A1 |
| СИСТЕМА "ТОНКОГО" РЕГУЛИРОВАНИЯ ТОЛЩИНЫ ПОЛОСЫ НА НЕПРЕРЫВНОМ СТАНЕ ХОЛОДНОЙ ПРОКАТКИ | 1993 |
|
RU2065790C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
РЕГУЛЯТОР ДЛЯ ОБЪЕКТОВ С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ, содержащий последовательно соединенные блок задания, первый сумматор, инерционное звено, первый блок определения модуля, первый усилитель и второй сумматор, второй вход которого соединен с блоком уставки, а третий вход - с вторым выходом инерционного звена, а также последовательно соединенные переключатель, сигнальный вход которого через второй усилитель связан с выходом первого сумматора, третий сумматор, второй вход которого через третий усилитель связан с выходом первого сумматора, и интегратор, отличающийся тем, что, с целью повышения надежности и упрощения, в него введен ждущий мультивибратор, вход которого соединен с выходом второго сумматора, а выход S с управляющим входом .переключателя (Л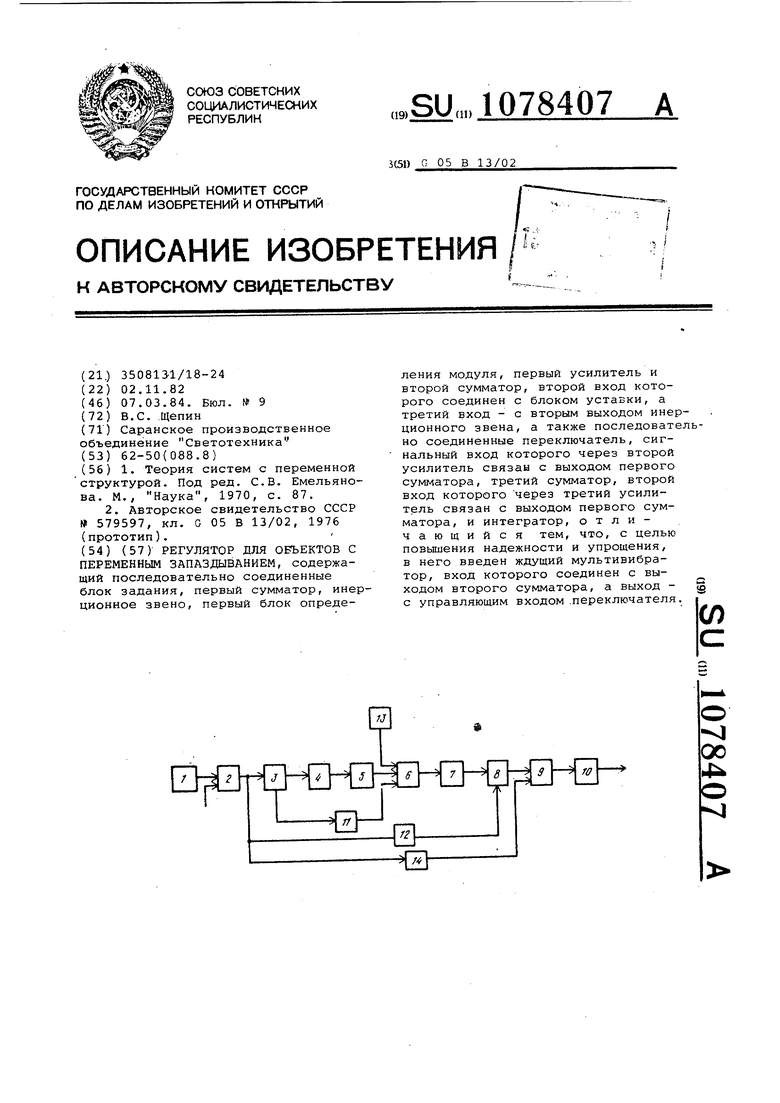
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Теория систем с переменной структурой | |||
| Под ред | |||
| С.В | |||
| Емельянова | |||
| М., Наука, 1970, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулятор для объектов с переменным запаздыванием | 1976 |
|
SU579597A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
