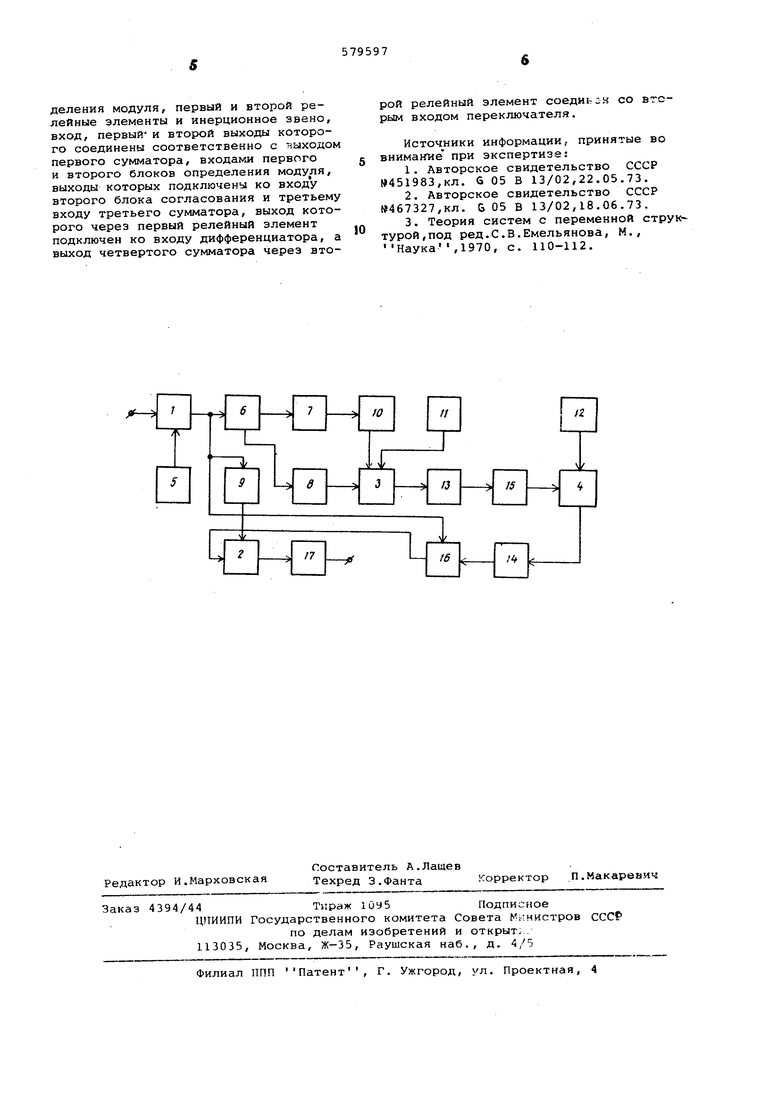
(54) РЕГУЛЯТОР ДЛЯ ОБЪЕКТОВ С ПЕРЕМЕЯНЫМ ЗАПАЗДЫВАНИЕМ торы,блок 5 задания, инерциовнов звено 6, первый 7 и второй 8 блоки определения модуля, первый 9 и второ 10 блоки согласования, первый 11 и второй 12 блоки формирования уотайки, первый 13 и второй 14 релейные элементы, дифференциатор 15, переклю чатель 16, интегратор 17, Регулятор работает следующим образом. В регуляторе реализуется закон уп равления U(t)J(jue+ -C}di (U где - ошибка регулирования, получаемая на выходе сумматора 1, на входе которого входной сигнал регулятора X и выходной блока задания 5; 4(f)i - выходной сигнал переключателя 16 на входе которого сигнал и выходной сигнал fCt) релейного элемента 14, причем d-, если r(t) 0 или не сущест вует интервала времени ta t - Tn .t , при котором rCi)0 ,, , о в противном случае (Тл такс Т ) сигнал , проходя через блок 9 согласования, суммируется на сумматоре 2 с сигналом ф ; выходной сигнал сумматора 2 входной интегратор 17, чей выход -U(t) . Ошибка регулирования С поступает на вход инерционного звена 6, под первым и вторым выходными сигналами которого понимаются непосредственно выходной сигнал у инерционного звена 6 и сигнал у , являющейся промежуточной координатной инерционного звена 6, С помощью блока определения модуля 7 и блока согласования 10 формируется сигнал ,1у( , ас помощью блока определения модуля 8- сигнал 101 . Сигналы Му п|у| , а также выходной сигнал блока формирования уставки 11, суммируются на сумматоре 3,- образуя сиг нал S-ji|y(-ly|-fr , (3)(3) который поступает на вход релейного элемента 13. Сигнал,получаемый в результате реального дифференцирования дифференциатором 15 выходного сигнала q. релейного элемента 13, алгебраически складывается на сумматоре 4 с сигналом, поступающим с блока формирования уставки 1, Выходной сигнал сумматора 4 - входной релейно го элемента 14. Рассмотрим принцип работы регуля- ° для объектов с переменным запаз дыван ер на примере регулирования не эаи1умленного объекта, представляющего собой чистое запаздывание. Пусть произошло скачкообразное изменение задания . Заметим, что ju выбирается малым f/и 0) . Пусть, например, . Так как объект незашумлен, постоянная времени и нерционного звена выбирается минимальной и, как следствие этого, траектории движения изображающей точки в фазоэых пространствах (у,у} и (€,) с большой степенью точности совпадают. Итак, изменение задания вызывает появление ненулевой ошибки регулирования . И если до изменения задания &40 и ,то после и yug , что влечет на некоторый промежуток времени ts , значение которого зависит от параметров дифференциатора и сигнала с блока формирования уставки 12. Если в ot (2) настроить так, что oct3 Ко,(5) где Ко - постоянный коэффициент усиг ления объекта, то через время Т переходный процесс закончится. Пусть, например, запаздывание изменилось до Т( . В этом случае следующий переходной процесс закончится через время Т , т.е. будет продолжать оставаться оптимальным. Таким образом, использование регулятора для объектов с переменным запаздыванием в отличии от существующих устройств обеспечивает высококачественное регулирование, объектов с чистым запаздыванием, меняющимся п широком диапазоне. Формула изобретения Регулятор для объектов с переменным запаздыванием, содержащий последовательно сое,циненные блок задания, первый сумматор и первый блок согласования, вы.--:од которого подключен к первому входу второго сумматора, третий сумматор, первый и второй входы которого соединены соответст:енно с первым блоком формирования уставки и выходом второго блока сог.,эсования, дифференциатор и второй Глок формирсаании уитавки, подключенные соответственно к первому и второму входам четвеотогс --умматора, переключатель, первый вход и выход которого соединены соответственно с выходом первого сумглатора и со вторым входом второго сумматоре, выход которого подключен к интегратору, отличающийся тем, тто, с целью повышения качества регулирования, в него введены первый и второй локи определения модуля, первый и второй релейные элементы и инерционное звено, вход, первый и второй выходы которого соединены соответственно с выходом первого сумматора, входами первого и второго блоков определения модуля, выходы которых подключены ко входу второго блока согласования и третьему входу третьего сумматора, выход которого через первый релейный элемент подключен ко входу дифференциатора, а выход четвертого сумматора через второй релейный элемент соедиьэн со вторым входом переключателя.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР (451983,кл. G 05 В 13/02,22.05.73.
2.Авторское свидетельство СССР 467327,кл. G 05 В 13/02,18.06.73.
3.Теория систем с переменной стру турой,под ред.С.В.Емельянова, М., Наука ,1970, с. 110-112.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор для объектов с переменным запаздыванием | 1982 |
|
SU1078407A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Адаптивный регулятор с переменной структурой | 1973 |
|
SU460529A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Устройство для управления инер-циОННыМ Об'ЕКТОМ | 1978 |
|
SU796788A1 |
| Устройство адаптации | 1979 |
|
SU813358A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Адаптивный регулятор с переменной структурой | 1973 |
|
SU451983A1 |
