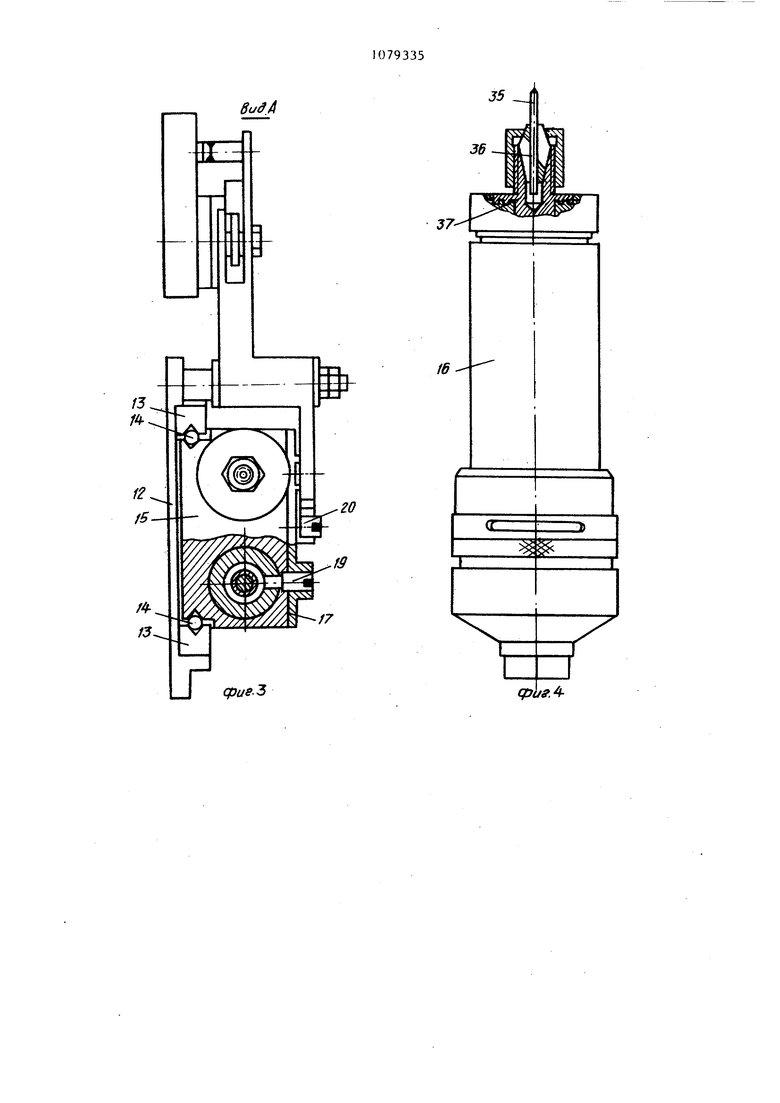
Изобретение относится к обработке металлов давлением, в частности автоматичестшм устройствам д.пя обраб ки ленточ1гого материала, Известен универсально-шбочпый автомат .для изготоапеггия деталей из ленты, содержаний смонтированные на вертикальном столе кинематически свя занные с общим приводом подающий и р товочный механизмы, установленную н каретке инструментальную головку и размещенные по обе стороны от нее штампы для пробивки отверстий и вырубки контура и гибочн11|й 1 J. Недостатком известного автомата является отсутствие в нем устройства для сверления отверстий в ленте, что снижает его технологические возможности и увеличивает трудоемкость изготовлений деталей, имеющих отверстия. Целью изобретения является повыше ние качества {гзготовляемых детал.ей. Поставленная цель достигается тем, что в универсально-гибочном автомате для изготовления деталей из ленты, преимущественно контактодержателей, содержащем смонтированны на столе кинематически связанные с общим приводом подающий и рихтовочный механизмы, установленную на корпусе инструментальную головку и размещенные по обе стороны от нее со ответственно штампы для пробивки отверстий вырубки контура и гибки, а также зенковочное устройство, в столе выполнены шариковые направляющие перпендикулярно направлению подачи ленты, а зенковочное устройство выполнено в виде размещенного в этих направляющих с возможностью воз вр атно-поступательно го пер емещения корпуса с винтовыми упорами и отверстияг-м, оси которого параллельны меходу собой, двух зенковочных головок, разметенных в упомянутых отверс тиях, и установленного на корпусе кронштейна с пазами и регулировочными винтами, смонтированными в этих пазах, при этом продольная ось каждого паза расположена в одной плоскости с осью соответствук5цзй зенковочной головки, регулировочные винты кронштейна размещены с возможностью взаимодействия с винтовыми упорами корпуса, а связь зенковочного устрой ства с общим приводом осуществляется посредством оси, размещенной между 3eHKOBO4Hb NfH головками, и рычага с открытым пазом на одном и-з его конов, взаимодействующего с этой осью. Кроме того, автомат снабжен закепленным па каретке инструментальой головки прижимом, а в столе выполена направлягощая с пазом для направеш-гя ленты и отверстиями, оси котоых совпадают с осяг-и зенковочных гоовок. На фиг, I показан автомат, общий вид; на фиг,2 - зенковочное устройство; на фиг.З - вид А на фиг,2; на фиг.4 - зенковочная машинка; на фиг.З - технологическая схема. На вертикальном столе автомата 1 расположены механизм рихтовки 2,предназначенныр для рихтовки ленты, подаю щий механизм 3 клещевого типа для подачи материала в зону обработки, пра-. вый пресс-блок 4, в котором установлен штамп 5 для пробивки отверстий и обрубки контура детали в ленте; инструментальная головка 6, в карет Кб которой закреплен прижим 7, фиксирующий ленту на позиции зенкования отверстий, левый пресс-блок 8, в коTopoNv установлен гибочный штамп 9, Предназначенный для окончательного формирования детали, зенковочное устройство 10, направляющая 11, Зенковочное устройство 10 состоит из основания 12, крепящегося к плоскости стола автомата, на котором смонтированы остальные узлы и детали устройства, щариковых направляющих 13, шариков 14 корпуса 15,перемещающихся в шариковых направляющих, зенковочных головок 16,расположенных в отверстиях Kopiryca, кронштейна 17, закрепленного на корпусе, регулировочных винтов 18, с помощью которых фиксируются зенковочные головки в корпусе, винтовых упоров 19, оси 20, привода устройства в возвратнопоступательное движение,состоящего из рычага 21, осей 22 и 23, ролика 24, зацепов 25,пружин 26, вала 27,на котором закреплен кулачок 28, плиты 29. Лента 30 размещена в бухте 31, В штампе 5 закреплены пуансоны 3234 для пробивки отверстий в ленте 30 и отрубки контура штампуемой детали. В зенковочных головках 16 установлены сверла 35, закрепленные в цангах 36. При этом шпиндели 37 зенковочных головок 16 приводятся во вращение сжатым воядухом через турбинки (не показаны). В направляющей 11 выполнены паз 38, ширина и глубина которого равны соответственно ширине и толщине штампуемой ленты 30,и отверстия 39 для входа сверл 35.Прижим 7, закрепленный в ка ретке головки инструмента 6, приводи ся в движение от кулачка 40. В левом пресс-блоке 8 установлен штамп 9, пуаисон 41 которого производит от рубку детали от ленты 30 по матрице 42. Привод всех узлов осуществляется от центральной шестерни 43. Автомат работает следукщим образом. Лента 30 из бухты 31 через меха|Низм рихтовки 2 перемещается подающим механизмом 3 в штамп 5, установлен1:ый в правом пресс-блоке 4, где п ансонами 32 и 33 пробиваются отверстия, а пуансоном 34 обрубается контур штампуемой детали, затем по направляющей 11, через некоторое чис ло шагов подачи пробитые отверстия зенкуются сверлами 35, закрепленными в цангах 36 зенковочных голоьок 1ft. В момент зенкования лента прижимается к направляющей II прижимом 7,в кото-ром соосно с отверстиями в направ ляющей 11 выполнены отверстия для ввода сверла закрепленным в каретке инструментальной головки 6 и приводи14 1М в возвратно-поступатеяьное движение от кулачка 40. Режим зен« кования задается пропилен кулачка 28, установленного на валу 27. В левом пресс-блоке 8 установлен штамп 9, пуансон 41 которого производит отрубку детали от ленты и ее гибку на матрице 42. Применение предлагаемого автомата позволяет повысить качество, снизить трудоемкость изготовления контактодержателя, а также высвободить оборудование и производственные площади, на которых производилась зенковочная операция.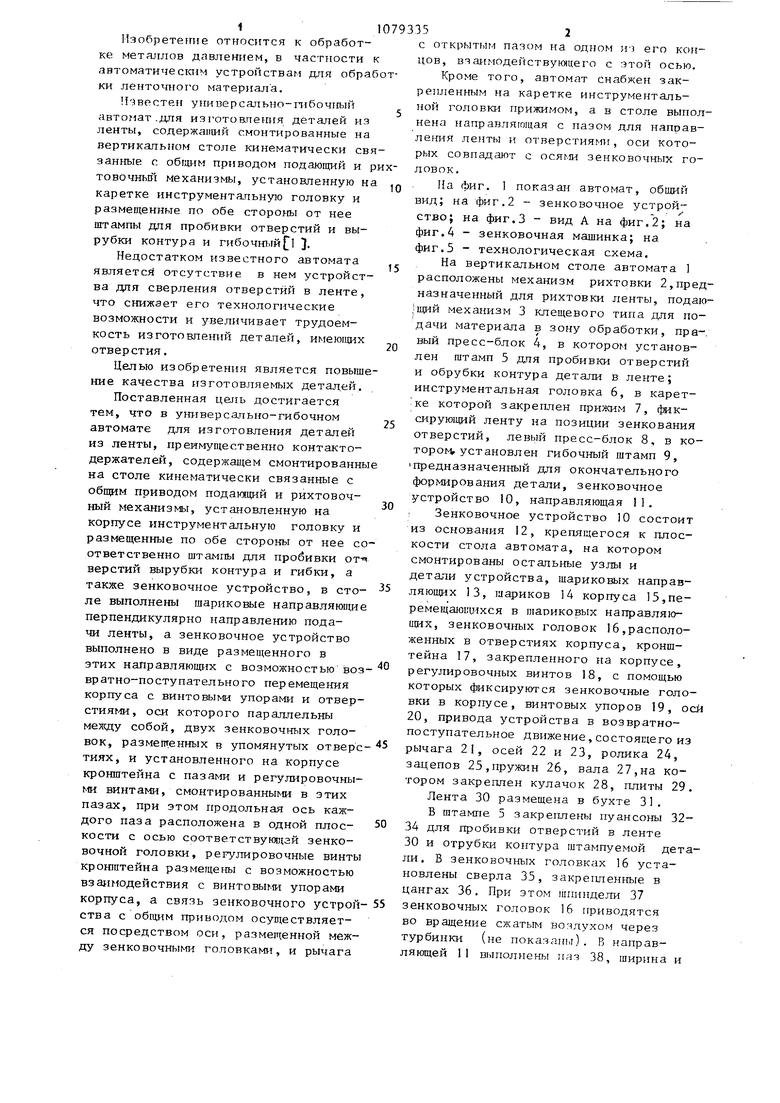

| название | год | авторы | номер документа |
|---|---|---|---|
| Универсально-гибочный автомат для изготовления деталей малых серий | 1988 |
|
SU1637891A1 |
| Автомат универсально-гибочный, штамповочный, модульного типа | 1989 |
|
SU1813585A1 |
| Инструмент для резки миниатюрных деталей на универсально-гибочных автоматах | 1987 |
|
SU1505622A1 |
| Устройство для изготовления изделий из проволоки | 1989 |
|
SU1703231A1 |
| Универсально-гибочный автомат с приводом от центральной шестерни | 1984 |
|
SU1245381A1 |
| Штамп для вырубки и гибки деталей из полосового материала | 1980 |
|
SU931262A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СЛОЖНОПРОФИЛЬНЫХ ЖАЛЮЗИЙНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2837535C1 |
| Автомат универсально-гибочный с приводом от центральной шестерни | 1986 |
|
SU1423219A1 |
| Автомат для сверления,зенкования фасок и нарезания резьбы | 1984 |
|
SU1166966A1 |
| Пресс-автомат для пробивки отверстий в ободьях колес | 1960 |
|
SU139648A1 |



1. УННВЕРСАПЬНО-гаБОЧНЬЙ АВТОМАТ для изготовления деталей из ленты, преиг щественно контактодержателей, содержащий смонтированные на столе кинематически связанные с общим приводом подающий и рихтовочный механизг-ы, установленную на корпусе инструментальную головку и размещенные по обе стороны от нее соответственно штампы для пробивки отверстий, и 1рубки контура и гибки, а также зенковочное устройство, отличающийся -тем,что, с. цепью повышения качества изготовляемых деталей, в столе выполнены шариковые направляющие перпендикулярно направлению подачи ленты, а зенковочное устройство №1полнено в виде размещенного в этих направляющих с возможностью возвратно-поступательного перемещения корпуса с винтовыми ynopahw и отверстиями , оси которых параллельны между собой, двух зенковочных головок, размещенных в упомянутых отверстиях, и установленного на корпусе кронштейна с пазами и регулировочными винтами, смонтированными в этих пазах, при этом продольная ось каждого паза расположена в одной плоскости с осью соответствующей зенковочной головки, регулировочные винты кроюттейна размещены с возможностью взаимодействия с винтовыми упорами корпуса, связь зенковочного устройства с общим а ® приводом осуществляется посредством оси, размещенной между зенковочными (Л головками, и рычага с открытым пазом, на одном из его концов, взаимодействующего с этой осью. 2. Универсально-гибочный автомат по п. 1, о т л и ч а ю щ и и с я тем,что он снабжен закрепленным на каретке инструментальной головки sj прижимом, а в столе выполнена напсо равлякщая с пазом дпя направления ленты и отверстияьш, оси которых совсо DO падают с осями зенковочных головок. ел
qpue.i
26
25
29
Z8
Cpue.2
видА
u.
35
36
(ригЛ
IX)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Н.А.Федоров и Шабельский И.З | |||
| Универсально-гибочные автоматы | |||
| М., Машгиз, 1961, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
