v|
СО 4
СП
Изобретение относится к машиностроению, в частности к автоматизации сборочных работ изделий радиоэлектронной аппаратуры, и может быть использовано в роторных сборочных автоматах для сборки изделий радиоэлектронной аппаратуры.
Известна механическая рука, преимущественно для роторного сборочного автомата, содержащая корпус, размещенный в нем приводной вал, рычаг управления и механизм перемещения захвата, а также зубчатые кинематические передачи по координатам перемещения ll .
Недостатками известного устройства являются малая точность позиционирования, особенно при работе с небольшими деталями, трудность регулировки захвата по вылету и повьпиенная мощность привода.
Цель изобретения - пов111шение производительности за счет сокращения времени установки изделия и захватывания .
Цель достигается тем, что механическая рука, содержащая корпус, размещенный в нем приводной вал, рычаг управления и механизм перемещения захвата, а также зубчатые кинематические передачи по координатам перемещения, снабжена фрикционной передачей, смонтированной между корпусом и приводным валом, подпружиненной втулкой, штоком и зубчато-реечной передачей со сдвоенными зубчатьлми колёсами и взаимно перпендикулярными рейками, при этом подпружиненная втулка размещена на приводном вашу, шток закреплен на корпусе параллельно валу, на приводном валу установлено одно из сдвоенных зубчатых колес зубчато-реечной передачи, а рейка другого зубчатого колеса связана с подпружиненной втукой приводного вала.
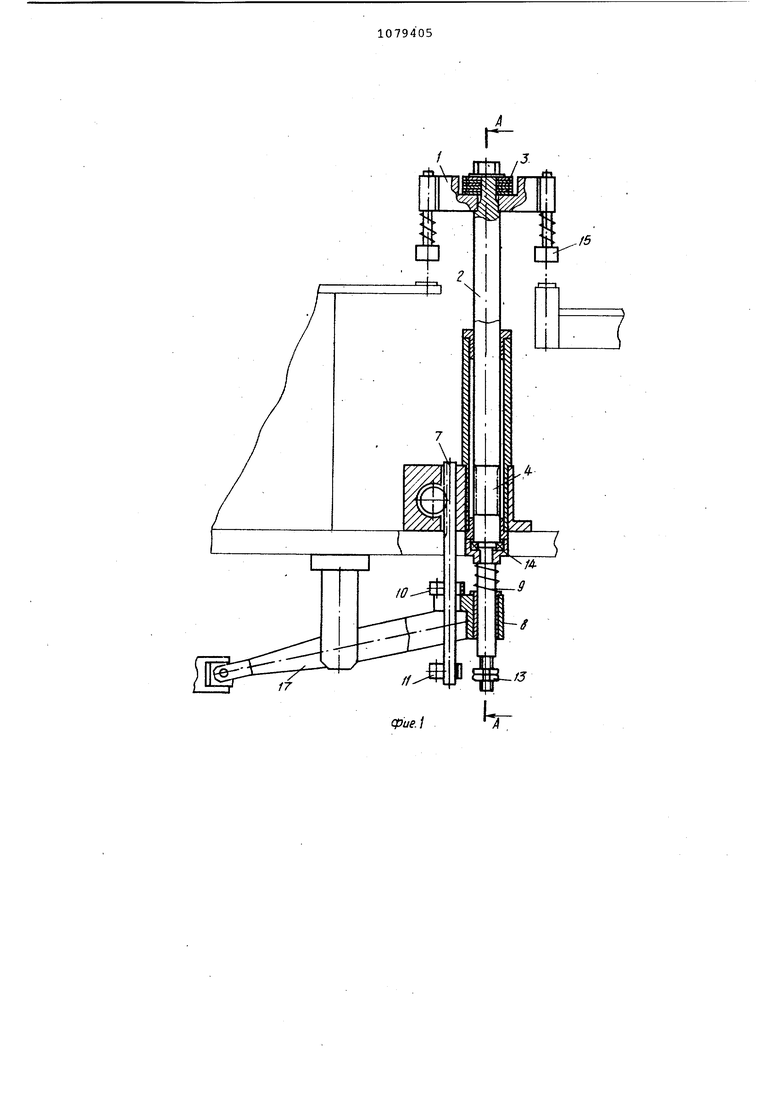
На фиг. 1 изображен манипулятор, общий вид на фиг. 2 - разрез А-А на фиг, 1) на фиг. 3 - кинематическая схема руки.
Механическая рука содержит корпу 1, соединенный с приводным валом 2 фрикционной передачей 3. Шестерня 4 выполнена на приводном валу 2,
находится в зацеплении с горизонтетьной рейкой 5 и спаренньам зубчатым колесом 6, также в зацеплении находится вертикальная рейка 7. Втулка 8 и пружина 9 смонтированы на приводном валу, а упоры 10 и 11 установлены на рейке 7.
Шток 12 установлен вдоль приводного вала 2 и преднс1значен для точного останова корпуса 1 при повороте. Знизу на конце приводного вала 2 установлены ограничители 13 и 14, обеспечивающие установленный ход приводного вала 2.. Захват 15, устанавливается на корпусе 1. Приводной рычаг 16 крепится к втулке 8. На корпусе 1 установлены направляющие втулки 17, вдоль приводного вала 2 установлен направляющий штырь 18.
Устройство работает следующим образом.
При перемещении рычага 16 втулка 8 движется вниз, освобождая пружину 9 до соприкосновения с ограничителями 13, дальнейшее движение втулки 8 происходит совместно с приводным валом 2.. Корпус 1 с захватом 15, насаженным на приводной вал .2 с помощью фрикционной передачи 3, опускается вниз, и направляющей втулкой 17 входит в направляющий штырь 18. Одновременно с этим втулка 8 через упор 11 перемещает вертикально вниз рейку 7 и через спаренное зубчатое колесо б поворачивают приводной вал 2 на 180 , при этом происходит проскальзывание дисков фрикционной передачи 3. При вращении рьгаага 16 в исходное положение происходит перемещение втулки 8 совместно с приводным валом 2 вверх до соприкосновения с ограничителем 14,
Преимущества изобретения заключаются в том, что рука имеет всего один привод для перемещения схвата в горизонтальной и вертикальной плоскостях, оно малогабаритно и хорошо вписывается в роторный автоМс Т .
Производительность повышается за fQ счет того, что время от захвата детали до установки для обработки уменьшается до 5-6 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая рука | 1979 |
|
SU806363A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Полуавтомат для сборки изделий типа галетных переключателей | 1981 |
|
SU1069971A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Автомат для сборки радиаторов | 1982 |
|
SU1042944A1 |
| Установка для изготовления изделий из ленты | 1981 |
|
SU1178556A1 |
| КАЛИБРОВОЧНЫЙ АВТОМАТ | 1996 |
|
RU2101159C1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Устройство для свинчивания деталей | 1981 |
|
SU973287A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |

МЕХАНИЧЕСКАЯ РУКА преимущественно для роторного сборочного автомата, содержащая корпус, размещенный в йем приводной вал, рычаг управления и механизм перемещения захвата, а также зубчатые кинематические передачи по координатам перемещения, отличающаяся тем, что, с целью повышения производительности за счет сокращения времени установки изделия и захватывания, она снабжена фрикционной передачей, смонтированной между корпусом и приводным валом, подпружиненной втулкой, штоком и зубчато-реечной передачей со сдвоенными зубчатыми колесами и взаимноперпендикулярными рейками, при этом подпружиненная втулка размещена на приводном валу, шток закреплен на корпусе параллельно валу, и одно из сдвоенных зубчатых колес зубчато-реечной передачи смонтировано на этом валу, а рейка другого зубчатого колеса связана с подпружиненной втулкой.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 1971 |
|
SU416210A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
