(54) АВТОМАТИЧЕСКАЯ РУКА
| название | год | авторы | номер документа |
|---|---|---|---|
| СПРЕДЕР ТЕЛЕСКОПИЧЕСКИЙ | 2013 |
|
RU2533620C1 |
| Механическая рука | 1983 |
|
SU1079405A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Загрузочное устройство | 1975 |
|
SU558776A1 |
| Устройство для подачи штучных заготовок в зону обработки | 1976 |
|
SU607625A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО РОБОТИЗИРОВАННОЙ ЛИНИИ СБОРКИ-СВАРКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1990 |
|
SU1737838A1 |
| Устройство для укладки цилиндрических изделий в тару | 1987 |
|
SU1442456A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Устройство для перемещения и ориентирования штучных заготовок | 1987 |
|
SU1433588A1 |
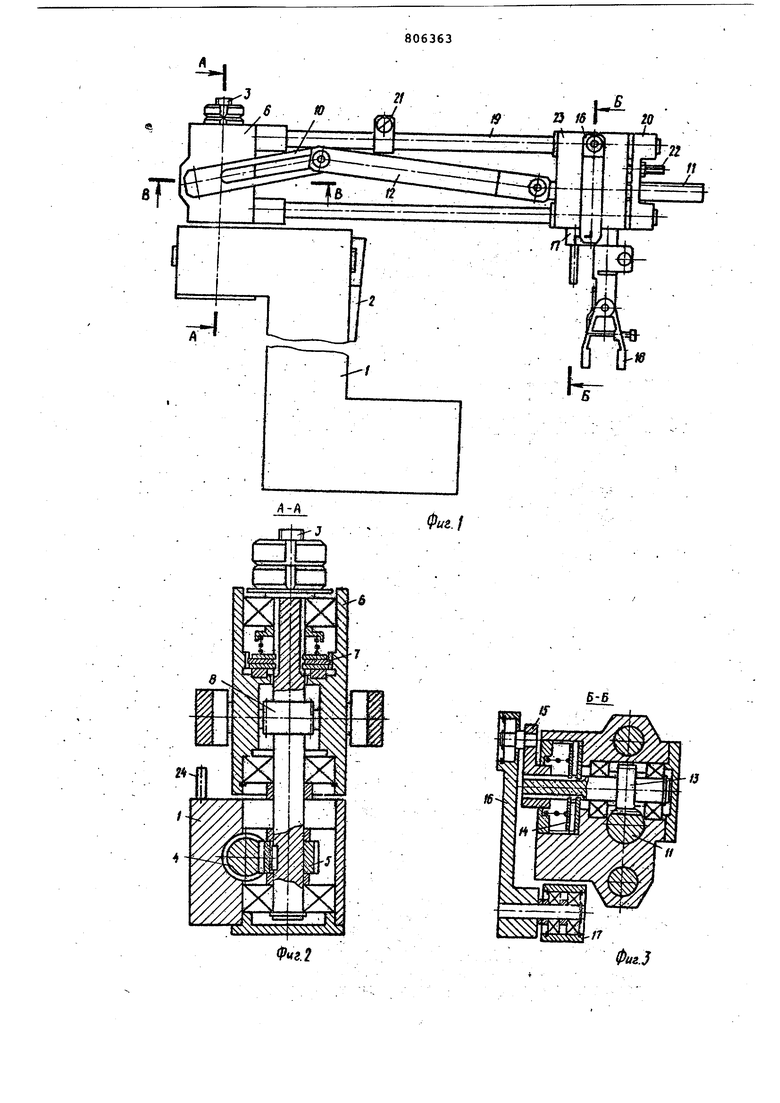
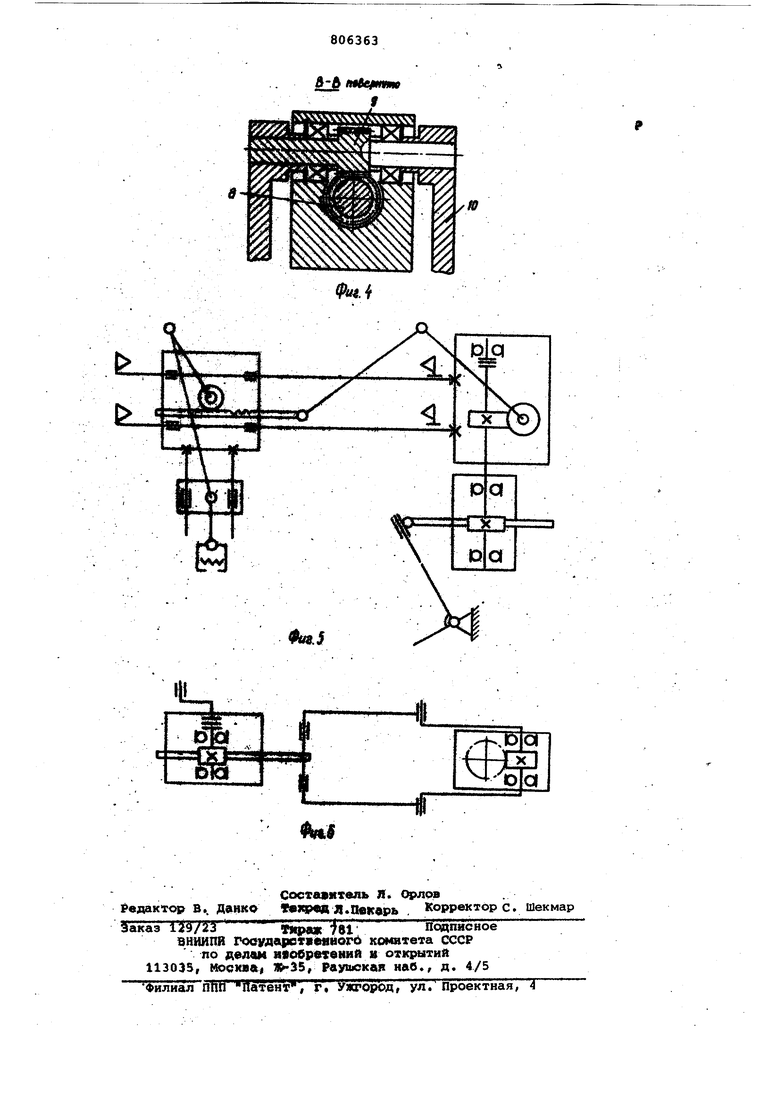
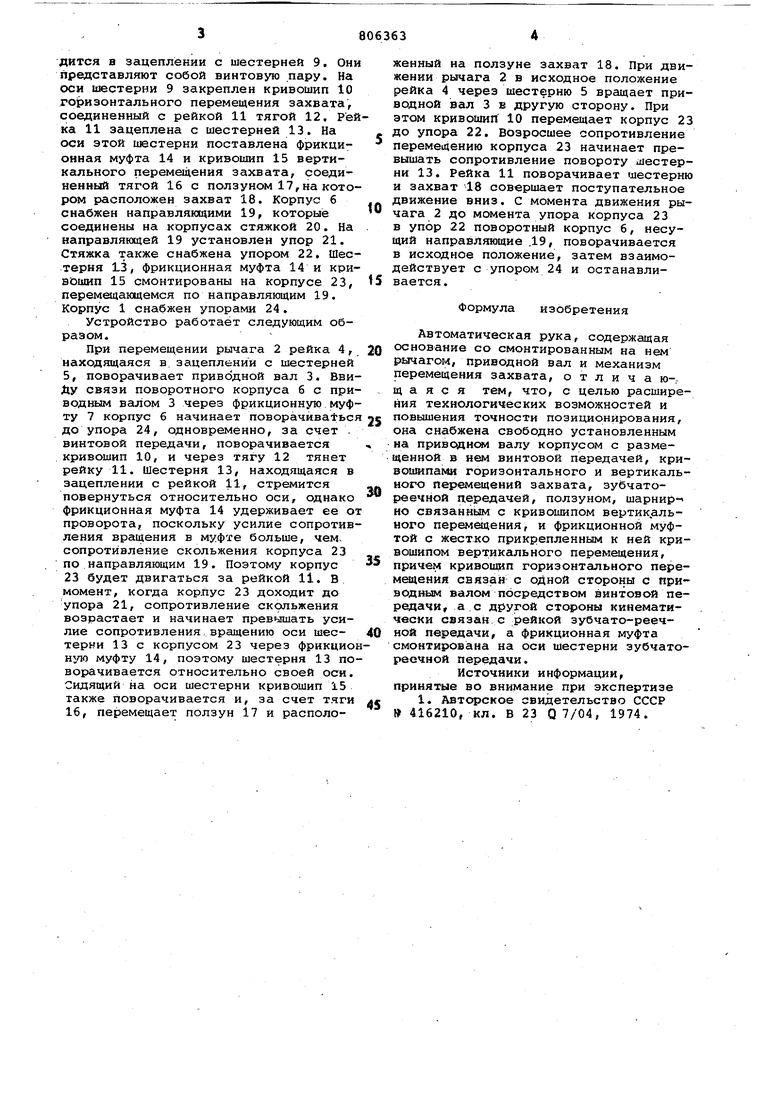
Изобретение относится к машиностроению и может быть использовано, в частности, в автоматических с6о|юч ных линиях для установки и съема из делий..Известна автоматическая рука, со держащая основание со смонтированным на нем рычагом, приводной вал и меха низм перемещения захвата 1. Недостатками известной автоматической руки являются невысокая точность позиционирования захвата, отсутствие перемещения захвата вдоль горизонтальной оси устройства и отсутствие переналадки по углу поворота руки и вылету захвата, что сужа ет технологические возможности. Цель изобретения - повышение точности позиционирования и расширение технологических возможностей. Для достижения поставленной цели автоматическая рука снабжена свободн установленным на приводном валу корпусом с размещенной в нем винтовой передачей, кривошипами горизонтального и вертикального перемещений захвата, зубчато-реечной передачей, ползуном, шарнирно связанным с кривошипом вертикального перемещения, и фрикционной муфтой G жестко прикрепленным к ней кривошипом вертикального перемещения, причем кривошип горизонтального перемещения связан с одной стороны с приводным валом посредством винтовой передачи, а с другой стороны кинематически связан с рейкой зубчато-реечной передачи, а фрикционная муфта смонтирована на оси шестер-. ни зубчато-реечной передачи. На фиг. 1 изображена автоматическая рука, вид сбоку; на фиг. 2 - сечение А-А на фиг. 1- на фиг. 3 - сечение Б-В на фиг. I) на фиг. 4 - сечение В-В на фиг. 1; на фиг. 5 - кинематическая схема руки, вид сбокуj на фиг. б - то же, вид сверху. Автоматическая рука состоит из неподвижного корпуса 1, в нижней части Которого установлен рычаг 2, соединенный с приводом, в верхней части корпуса смонтирован приводной вал 3, вращаемый от привода через рычаг 2 и рейку 4, для чего в нижней части приводного вала установлена шестерня 5. Йа выступанвдей из корпуса 1 части приводного вала смонтирован подвижный корпус 6. Приводной вал и подвижный корпус связаны при помсяци фрикционной 7. На приводном валу 3 выполнена шестерня 8, которая находится в зацеплении с шестерней 9. Они представляют собой винтовую пару. На оси шестерни 9 закреплен кривошип 10 гО1ризонтального перемещения захвата, соединенный с рейкой 11 тягой 12, Рей ка 11 зацеплена с шестерней 13. На оси этой шестерни поставлена фрикционная муфта 14 и кривошип 15 вертикального перемещения захвата, соединенный тягой 16 с ползуном 17,на котором расположен захват 18. Корпус 6 снабжен направляющими 19, которые соединены на корпусах стяжкой 20. На направлянхцей 19 установлен упор 21. Стяжка также снабжена упором 22. Шестерня 13, фрикционная муфта 14 и кривОшип 15 смонтированы на корпусе 23, перемещающемся по направляющим 19. Корпус 1 снабжен упорами 24. Устройство работает следующим образом. При перемещении рычага 2 рейка 4, находящаяся в. зацеплении с шестерней 5, поворачивает приводной вал 3. ВвиЙу связи поворотного корпуса 6 с приводным валом 3 через фрикционную,муфту 7 корпус 6 начинает поворачиваться до упора 24, одновременно, за счет винтовой передачи, поворачивается кривошип 10, и через тягу 12 тянет рейку 11. Шестерня 13, находящаяся в зацеплении с рейкой 11, стремится повернуться относительно оси, однако фрикционная муфта 14 удерживает ее от проворота, поскольку усилие сопротивления вращения в муфте больше, чемсопротйвление скольжения корпуса 23 по направляющим 19. Поэтому корпус 23 будет двигаться за рейкой 11. В момент, когда корпус 23 доходит до упора 21, сопротивление скольжения возрастает и начинает превышать усилие сопротивления вращению оси шестерни 13 с корпусом 23 через фрикцио куу) муфту 14, поэтому шестерня 13 по ворачивается относительно своей оси. Сидящий на оси шестерни кривошип 15 также поворачивается и, за счет тяги 16, перемещает ползун 17 и расположенный на ползуне захват 18. При движении рычага 2 в исходное положение рейка 4 через шестерню 5 вращает приводной 19ал 3 в другую сторону. При этом кривошип 10 перемещает корпус 23 до упора 22. Возросшее сопротивление перемещению корпуса 23 начинает превышать сопротивление повороту шестерни 13. Рейка 11 поворачивает шестерню и захват 18 со1вершает поступательное движение вниз. С момента движения рычага 2 до момента упора корпуса 23 в упор 22 поворотный корпус 6, несущий направляющие .19, поворачивается в исходное положение, затем взаимодействует с упором 24 и останавливается. Формула изобретения Автоматическая рука, содержащая основание со смонтированным на нем рычагом, приводной вал и механизм перемещения захвата, о т л и ч а ю-, щ а я с я тем, что, с целью расширения технологических возможностей и повышения точности позиционирования, она снабжена свободно установленным на приводисяя валу корпусом с размещенной в нем винтовой передачей, криBOtflHnaNSH горизонтального и вертикального перемещений захвата, зубчатореечной передачей, ползуном, шарнир но связанным с кривошипом вертикального перемещения, и фрикционной муфтой с жестко прикрепленным к ней кривошипом вертикгшьного перемещения, причем кривошип горизонтального перемецения связан с одной стороны с приводным валом посредством винтовой передачи, ас другой стороны кинематически связан с рейкой зубчато-реечной передачи, а фрикционная муфта смонтирована на оси шестерни зубчатореечной передачи. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 416210, кл. В 23 Q7/04, 1974.
Л-Ь1чЛенпш
,
f
