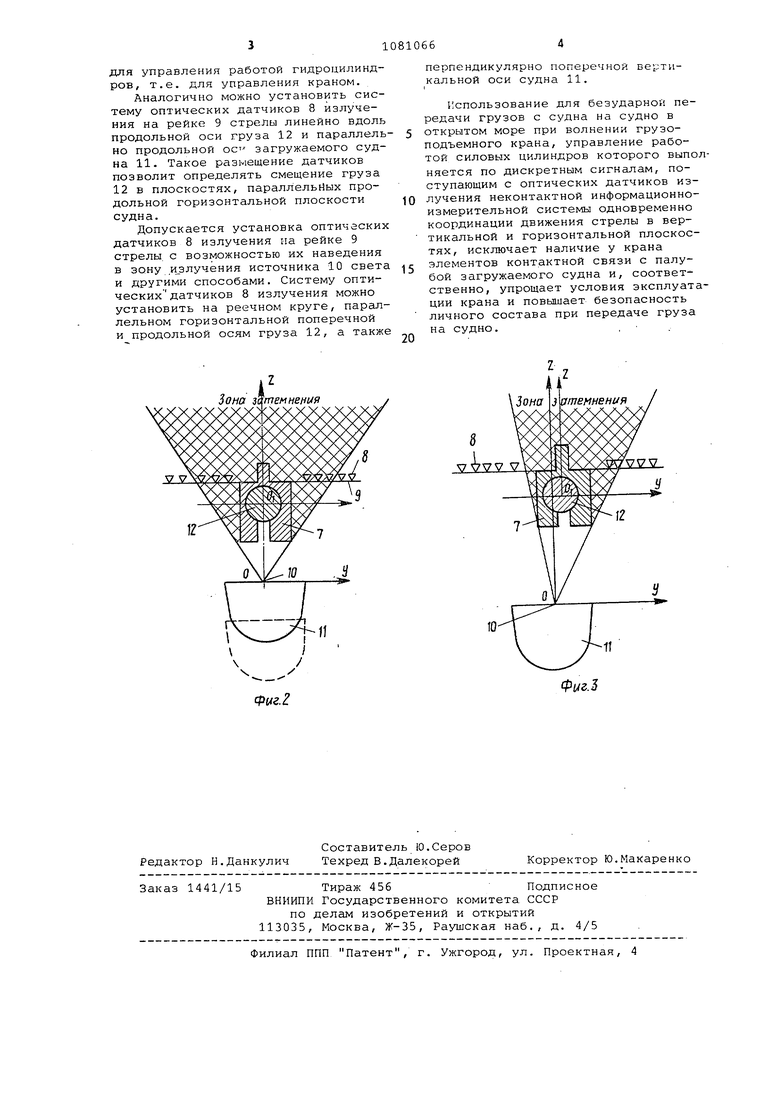
Изобретение бтносится к грузо подъемным средствам в судостроении в частности к грузоподъемным кранам для безударной нагрузки грузов на судно при волнении моря. Известен грузоподъемный кран, преимущественно для передачи грузов на судно при волнении моря, содержащий поворотную колонну со стрелой состоящей из шарнирно связанных меж ду собой звеньев с приводом их пере мещен ия, и оголовок с захватом для груза, закрепленный на концевом звене стрелы, а также следящую систему i Однако наличие у элементов ко тактной связи с палубой загружаемог судна усложняет условия его эксплуа тации . Целью изобретения является пов шение удобства при эксплуатации. Указанная цель достигается тем что в грузоподъемном кране, преимущественно для передачи грузов на судно при волнении моря, содержащем поворотную колонну со стрелой, состоящей из шарнирно связанных между собой звеньев с приводом из перемещения, и оголовок с захватом для груза, закрепленный на концевом ,звене стрелы, а также следящую сист му, последняя вкл очает установленный на судне в месте приема груза источник света, а также приемные оптические датчики излучения, npji этом оголовок стрелы снабжен жестко закрепленной и горизонтально расположенной рейкой, на которой равномерно по обе стороны захвата установлены указанные оптические датчики излучения. На фиг. 1 схематично изображен кран с гидроцилиндрами и следящей системой, общий вид; на фиг. 2 схема взаимодействия в плоскости се чения, параллельной поперечной плос кости загружаемого судна, установленных на рейке оптических датчиков излучения и источника света, установленного на судне в месте приема груза; на фиг. 3 - схема взаимодействия в плоскости сечения, параллельной горизонтальной плоскости загружаемого судна, установленных на рейке оптических датчиков излу,чения и источника света, установлен ного на судне в месте приема груза. Кран установлен на разгружаемом судне 1 и включает в себя поворотную колонну 2, несущую стрелу, состоящую из шарнирно связанных между собой звеньев 3 и 4. Звенья 3 и 4 управляются соответственно гидроцилиидрами 5 и,6. На концевом звене 4 укреплен оголовок 7 с захва том. В кране имеется следящая система в виде неконтактной информаци.онно-измерительной системы одновре;:менной координации движения стрелы крана в вертикальной и горизонтальной плоскостях. Оптические датчики 8 излучения этой системы установлены равномерно на горизонтальной рейке 9, закрепленной на оголовке 7, а источник 10 света системы установлен на загружаемом судне 11 в месте приема груза. Установка оптических датчиков 8 излучения на рейке 9 стрелы выполняется линейно вдоль горизонтальной поперечной оси груза 12, находящегося в захвате, и перпендикулярно вертикальной поперечной оси загружаемого судна 11 с возможностью наведения датчиков стрелой в зону излучения источника света. В зависимости от нахождения загружаемого судна 11 относительно разгружаемого судна работа крана осуществляется следующим образом. Гидроцилиндром 5 стрела поднимается или опускается, гидроцилиндром 6 поворота концевого звена стрелы это звено выпрямляется или спрямляется, соответственно, обеспечивается одновременное движение стрелы в вертикальной и горизонтальной плоскостях. При перемещении вверх или вниз, а также вправо или влево палубы судна 11 при волнении моря по данным оптических датчиков 8 излучения неконтактной информационно-измерительной системы одновременной координации движения стрелы в вертикальной и горизонтальной плоскостях отслеживается расстояние груза 12 в захвате стрелы от места покладки его на палубу судна11 и груз 12 перемещается к этому месту со скоростью, обеспечивающей безударность его погрузки. Принцип взаимодействия в плоскостях сечений, параллельных поперечной и горизонтальной плоскостям загружаемого судна 11, оптических датчиков 8 излучения и источника 10 света неконтактной информационноизмерительной системы одновременной координации движения стрелы в вертикальной и горизонтальной плоскостях (фиг. 2 и 31 основывается на прямолинейности распространения света в однородной среде. Нахождение в указанной среде непрозрачного и находящегося в захвате груза 12 приводит к возникновению зон затенения. Размеры и пространственное положение зон затенения зависят от положения груза относительно источника света. При переходе датчика или системы из зоны излучения в зону затенения происходит скачок выходного сигнала. Указанную информацию в виде дискретного сигнала, например тока или напряжения с датчика или системы их используют для управления работой гидроцилиндров, т.е. для управления краном. Аналогично можно установить систему оптических датчиков 8 излучения на рейке 9 стрелы линейно вдоль продольной оси груза 12 и параллель но продольной ОС загружаемого судна 11. Такое размещение датчиков позволит определять смещение груза 12 в плоскостях, параллельных продольной горизонтальной плоскости судна. Допускается установка оптических датчиков 8 излучения на рейке 9 стрелы, с возможностью их наведения в зону и злучения источника 10 света и другими способами. Систему оптических датчиков 8 излучения можно установить на реечном круге, параллельном горизонтальной поперечной и продольной осям груза 12, а также перпендикулярно поперечной Бе1:;ти кальной оси судна 11. Использование для безударной передачи грузов с судна на судно в открытом море при волнении грузоподъемного крана, управление работой силовых цилиндров которого выполняется по дискретным сигналам, поступающим с оптических датчиков излучения неконтактной информационноизмерительной системы одновременно координации движения стрелы в вертикальной и горизонтальной плоскостях, исключает наличие у крана элементов контактной связи с палубой загружаемого судна и, соответ ственно, упрощает условия эксплуатации крана и повышает безопасность личного состава при передаче груза на судно.
Фиг.2
Фиг.З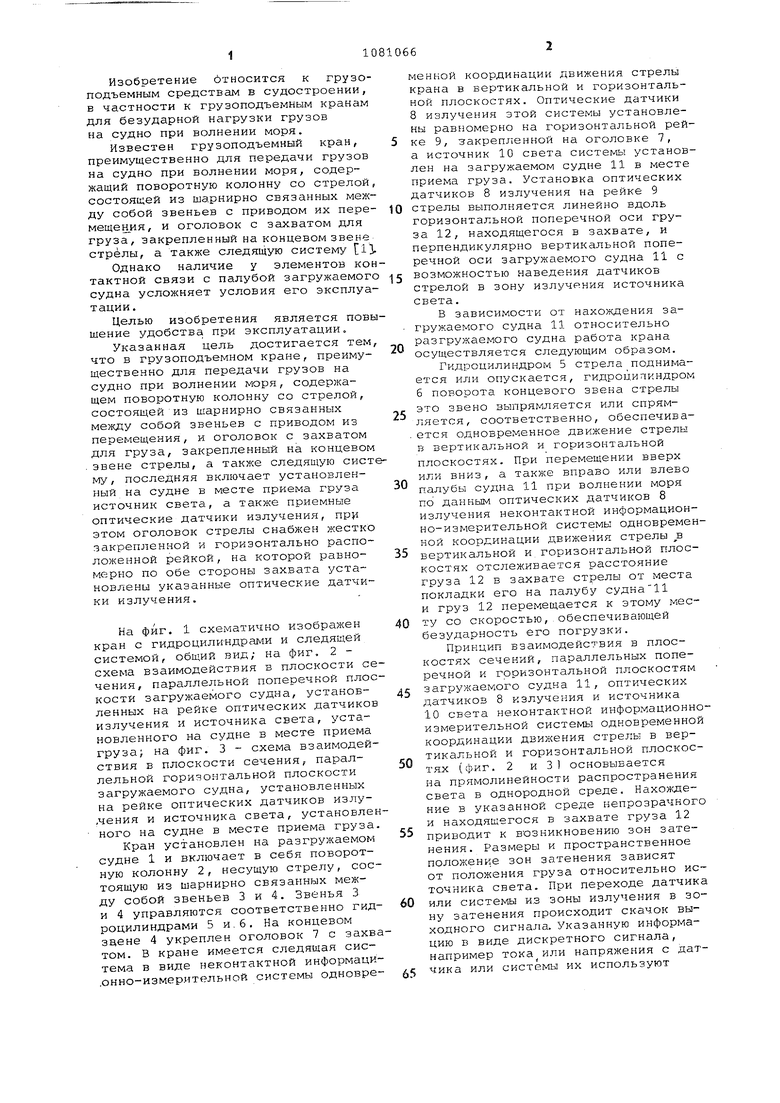
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1967 |
|
SU206056A1 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Кран для подачи груза с передающего судна на принимающее судно в условиях волнения моря | 1972 |
|
SU559856A1 |
| ГРУЗОПОДЪЕЛ1НЫЙ КРАН | 1973 |
|
SU380523A1 |
| ГРУЗОВОЙ КРАН | 1970 |
|
SU288266A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО К СТРЕЛОВЫМ КРАНАМ | 1965 |
|
SU171752A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ГРУЗОВ | 1971 |
|
SU308908A1 |
| Судовое грузовое устройство | 1974 |
|
SU514743A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1969 |
|
SU238362A1 |
ГРУЗОПОДЪЕМНЫЙ КРАН, преимущественно для передачи грузов на судно при волнении моря, содержащий поворо.тную колонну со стрелой, состоящей из шарнирно связанных между собой звеньев с приводом их перемещения, и оголовок с захватом для г|зуза, закрепленный на концевом звене стрелы, а также следящую систему, отличающийся тем, что, с целью повышения удобства при эксплуатации, в нем следящая система включает установленный на оудне в месте приема груза источник света, а также приемные оптические датчики излучения, при этом оголовок стрелы снабжен жестко закрепленной и горизонтально расположенной рейкой, на которой равномерно по обе стороны захвата установлены указанные оптические датчики излучения. с 00 05 О5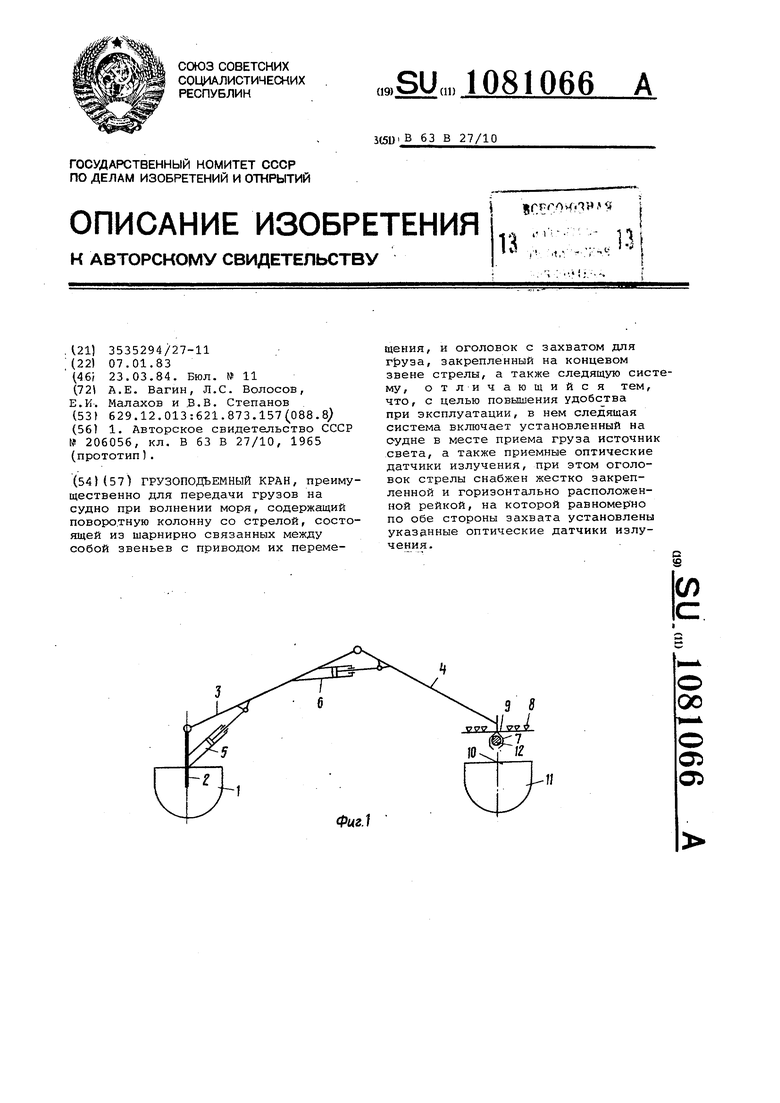
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 0 |
|
SU206056A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
