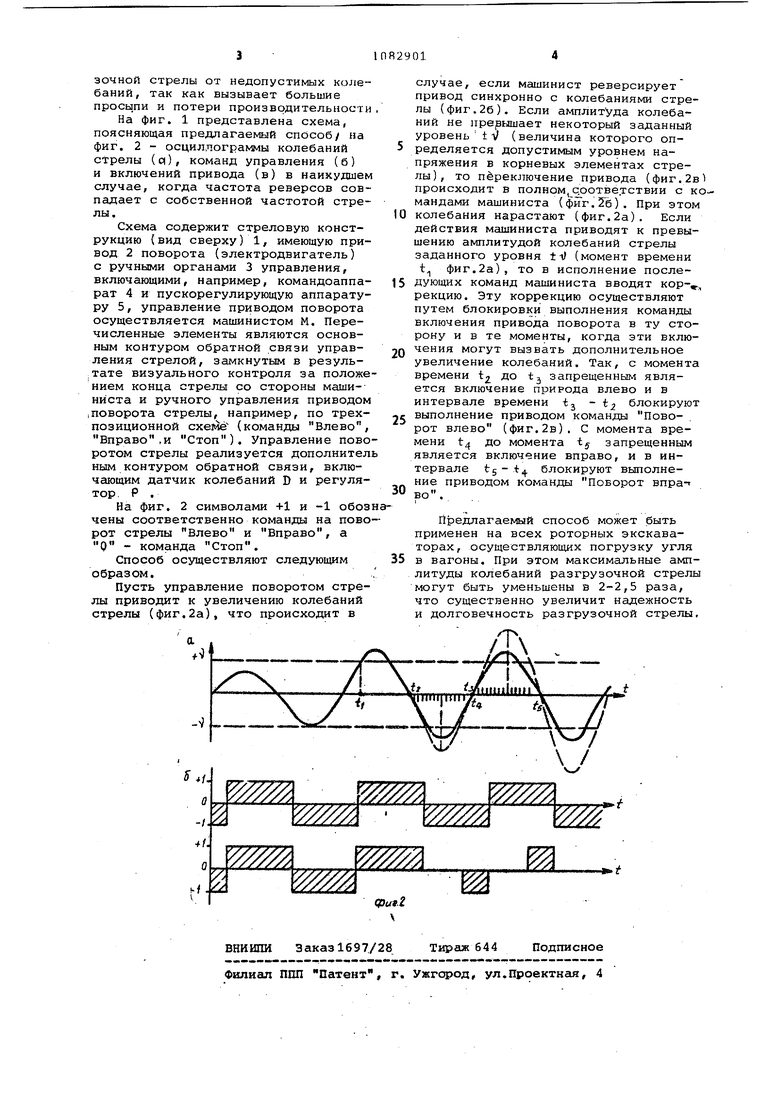
Изобретение относится к автомати зации производственных процессов на открытых горных разработках и может быть использовано для увеличения на дежности и стабильности работы рото ного экскаватора, в частности его разгрузочной стрелы. Известен способ демпфирования ко лебаний стреловых конструкций ротор ных экскаваторов, заключающийся в том, что измеряют усилие в элементе металлоконструкции стрелы, дифферен цируют сигнал, пропорциональный это му усилию и изменяют ток в обмотке возбуждения привода поворота стрелы пропорционально первой производной от усилия Cl3. Однако для гашения колебаний раз грузочной стрелы, оборудованной аси ронным приводом поворота, указанный способ неприменим. К недостаткам относится также изменение характерис тик привода (снижение жесткости, уве личение времени пуска) и постоянное вмешательство в работу машиниста, даже если колебания не превосходят допустимого уровня. Известен способ защиты стреловых конструкций роторных экскаваторов от недопустимых колебаний, заключающийся в том, что измеряют амплитуду {Колебаний разгрузочной стрелы, срав|Нивают с заданным значением и при превышении его отключают привод пово рота Г2 . Недостатком способа является снижение технологической эффективности роторных экскаваторов из-за простоев для разгрузочной стрелы известный способ оказывается неэффективным, так как неизбежные частые отключения привода поворота разгрузочной стрелы приводят к большим просыпям, простоя и потере производительности. Цель изобретения - повышение эффе5 тивности работы экскаватора. Поставленная цель достигается тем, что согласно способу гашения колебаний разгрузочной стрелы роторного экскаватора, заключающемуся в том, что измеряют амплитуду колебаний разгрузочной стрелы, сравнивают с заданным значением и при превышении его отключают привод поворота, измеряют фазу колебаний разгрузочной стрелы и включают привод, если направление включения совпадает по фазе с собственными колебаниями разгрузочной стрелы, Способ осуществим при условии, если недопустимые колебания стрелы вызваны не внешними силами, а неправильными действиями машиниста, что типично для разгрузочной стрелы, Привод поворота разгрузочной стрелы роторных экскаваторов при нагрузке угля в вагоны работает в режиме чайтых пусков, остановок и реверсов. Возбуждаемые при этом горизонтальные колебания стрелы (с частотой около 0,5 Гц) имеют в значительной степени случайный характер и могут превышать допустимый (по условиям усталостной прочности элементов металлоконструкции и привода) уровень в 1|5.-2 раза. Исследования показали,что возникновение недопустимых колебаний связано с резонансной раскачкой стрелы на ее собственной частоте, когда машинист реверсирует привод синхронно с колебаниями стрелы. Такой режим управления стрелой недопустим, так как приводит к развитию усталостных явлений в элементах металлоконструкции стрелы и привода. Кроме того, такой режим обусловлен не технологической необходимостью, а связан с возможными ошибочными действиями машиниста в сложных условиях управления. Предлагаемый способ позволяет защитить разгрузочную стрелу от недопустимых колебаний, вызванных неправильным управлением приводом поворота. Гсшение колебаний осуществляют путем кратковременных (на 0,6-1,2 с) блокировок выполнения команд на включение поворота стрелы вправо или влево. Блокировку осуществляют при одновременном выполнении следующих условий; колебания уже превосходят допустимый уровень f машинист пытается включить привод поворота стрелы в такой момент и в такую сторону, при которых включение вызовет дополнительную раскачку стрелы. Такие действия машиниста считают запрещенными и автоматически блокируют. Интервалы времени, когда включения поворота вправо (влево) вызывают дальнейшее увеличение колебаний, составляют не более половины периода колебаний, по этому время блокировки не превышает О,6-1,2. Включение привода в другие моменты времени разрешено, так как приводит к уменьшению колебаний. Предлагаемый способ позволяет эффективно гасить недопустимые колебания разгрузочной стрелы роторного экскаватора без потери производительности. .Это приводит к снижению динамических напряжений в элементах металлоконструкции разгрузочной стрелы и привода, повышению надежности и долговечности стрелы. При этом снижения производительности, увеличения просыпей не происходит так как время блокировки команд ручного управления минимально (1/4-1/2 периода колебаний). Известный способ, когда привод поворота полностью отключают на неопределенное время (до следующего включения машинистом), не обеспечивает эффективной защиты разгрузочной стрелы от недопустимых колебаний, так как вызывает большие просыпи и потери производительности На фиг, 1 представлена схема, поясняющая предлагаемый способ/ на фиг, 2 - осциллограммы колебаний стрелы (и), команд управления (б) и включений привода (в) в наихудшем случае, когда частота реверсов совпадает с собственной частотой стрелы, Схема содержит стреловую конструкцию {вид сверху) 1, имеющую привод 2 поворота (электродвигатель) с ручными органами 3 управления, включающими, например, командоаппарат 4 и пускорегулирующую аппаратуру 5, управление приводом поворота осуществляется машинистом М, Перечисленные элементы являются основным контуром обратной связи управления стрелой, замкнутым в резуль;Тате визуального контроля за положе нием конца стрелы со стороны машиниста и ручного управления приводом iповорота стрелы, например, по трехпозиционной схемё (команды Влево, Вправо,и Стоп), Управление пово ротом стрелы реализуется дополнител ным контуром обратной связи, включающим датчик колебаний D и регулятор . Р , На фиг, 2 символами +1 и -1 обоз чены соответственно команды на пово рот стрелы Влево и Вправо, а О - команда Стоп, Способ осуществляют следующим образом. Пусть управление поворотом стрелы приводит к увеличению колебаний стрелы (фиг,2а), что происходит в случае, если машинист реверсирует привод синхронно с колебаниями стрелы (фиг.26), Если амплитуда колебаний не превышает некоторый заданный уровень tV (величина которого определяется допустимым уровнем напряжения в корневых элементах стрелы), то переключение привода (фиг.2в1 происходит в полном,орответствии с командами машиниста (.Зб). При этом колебания нарастают (фиг.2а). Если действия машиниста приводят к превышению амплитудой колебаний стрелы заданного уровня ±V (момент времени t фиг,2а), то в исполнение последующих команд машиниста вводят кор-, рекцию. Эту коррекцию осуществляют путем блокировки выполнения команды включения привода поворота в ту сторону и в те моменты, когда эти включения могут вызвать дополнительное увеличение колебаний. Так, с момента времени t до tj запрещенным является включение природа влево и в интервале времени tj - t. блокируют выполнение приводом команды Поворот влево (фиг,2в). С момента времени t4 до момента ty запрещенным является включение вправо, и в интервале 5 - i. блокируют выполнение приводом команды Поворот впра- во. Предлагаемый способ может быть применен на всех роторных экскаваторах, осуществляющих погрузку угля в вагоны. При этом максимальные амплитуды колебаний разгрузочной стрелы могут быть уменьшены в 2-2,5 раза, что существенно увеличит надежность и долговечность разгрузочной стрелы.
а
И
Л
.
V 1 л 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 2023 |
|
RU2817340C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1995 |
|
RU2078021C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Кабина машиниста экскаватора | 1980 |
|
SU947309A1 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Устройство для гашения колеьаний металлоконструкций роторного экскаватора | 1977 |
|
SU617537A2 |
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| Подвеска стрелы рабочего органа роторного экскаватора | 1988 |
|
SU1709022A1 |
СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ ; РАЗГРУЗОЧНОЙ СТРЕЛЫ РОТОРНОГО ЭКСКАВАТОРА, заключающийся в том, что измеряют амплитуду колебаний разгрузочной стрелы, сравнивают с заданным Означением и при превышении его отключают привод поворота, о т л и :чающийся тем, что, с целью повышения эффективности работы экс;каватора, измеряют фазу колебаний . :разгрузочной стрелы и включают , если направление включения совпадает по фазе с собственными ;колебаниями разгрузочной стрелы. (Л 00 ю со 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ГАШЕНИЯ КОЛЕБАНИЙ МЕТАЛЛОКОНСТРУКЦИИ РОТОРНОГО ЭКСКАВАТОРА | 0 |
|
SU383794A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Боголюбов М.В | |||
| и др | |||
| Опыт применения устройства защиты металлоконструкций добычных роторных экскава;торов от недопустимых колебаний | |||
| Сб | |||
| Исследование по технологии и комплексной механизации разработки угля открытым способом | |||
| Вып | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| - во института горного дела им | |||
| А.А.Скочинского, 1977j с,53-57 .(прототип) | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
