(54) ШАГОВЫЙ КОНВЕЙЕР
щения платформ направляющим, имеющий иггангу с толкателями и механизм перемещения платформ с одной ветви на другую, штанга установлена между направляющими и снабжена дополнительными толкателями, которые закреплен на ее противоположной основным толкателем стороне, а механизм перемещения платформ с одной ветви на другую вьаполнен в виде обоймы с валом для взаимодействия с приводом механизма, при этом ось параллельна направляющим.
Такое выполнение конвейера и, в частности, механизма перемещения платфЪрм с одной ветви на другую позволит транспортировать грузонесущие .платформы в повернутом положении, при высоте платформы меньше ее ширины обеспечивается уменьшение габаритов шагового конвейера в плане.
При этом верхний уровень грузонесущей платформы на возвратной ветви совпадает с уровнем платформы на рабочей ветви, что не увеличивает гбаритов конвейера по высоте и создает возможность применить в механиме перемещения грузонесущих элементов вместо двух штанг одну, снабженную толкателями с двух сторон.
Применение вместо двух штанг одной упрощает конструкцию механизма перемещения грузонесущих платформ по направлягацим.
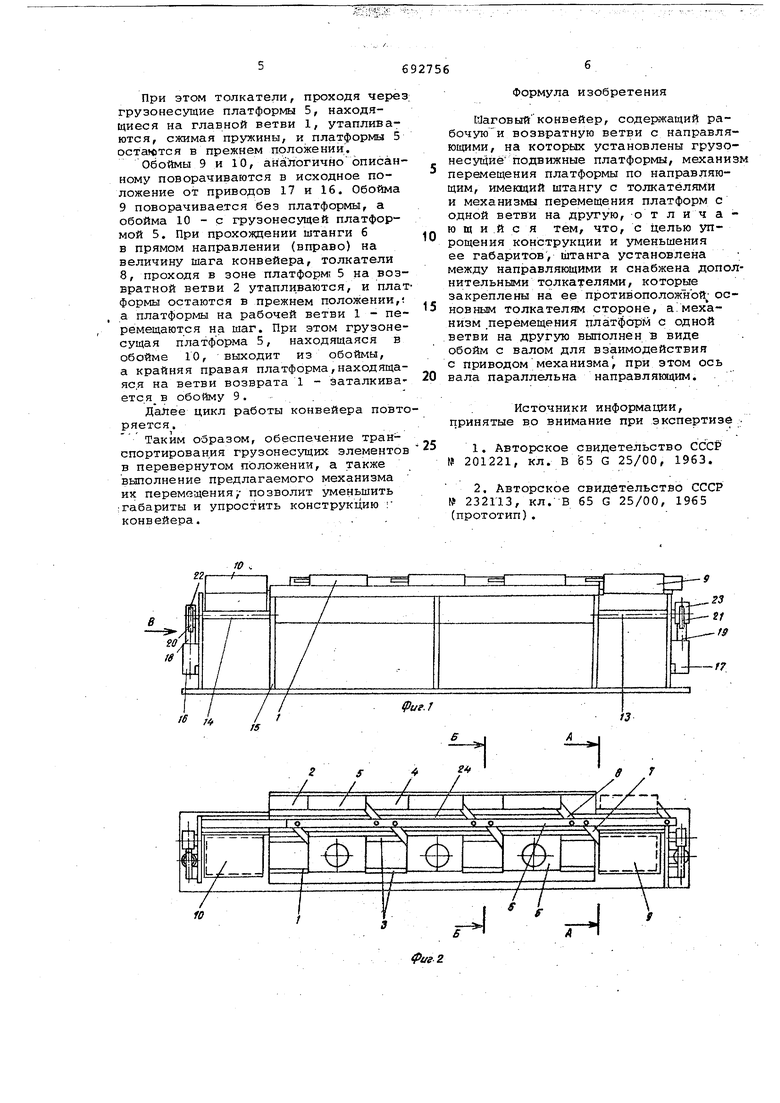
На фиг. 1 изображен шаговый конвейер, общий вид; на фиР. 2 - то же вид сверху; на фиг. 3 - разрез А-А на фиг. 2; нз фиг. 4 - разрез Б-Б на фиг. 2. ; на фиг. 5 - вид по стрелке В на фиг. 1.
Шаговый конвейер содержитрабочу и возвратную ветви 1 и 2, имеющие г соответственно направляющие 3 и 4 (см. фиг.2), установленные на них грузонесущими подвижными платфорцами 5, механизм перемещения платформ по направляющим, который выполнен в виде штанги б, установленной межд рабочей 1 и возвратной 2 ветвями. Штанга 6 снабжена толкателями J7 и 8 соответственно со стороны рабочей и возвратной ветвей 1 и 2.
Толкатели 7 и 8 подпружинены.Шта.нга б установлена с возможностью ее -перемещения на величину шага при прямом и обратном ходе.
Шаговый конвейер снабжен двумя . механизмами перемещения грузонесущих плг1Тформ с одной ветви на другую, выполненными в виде обойм 9 и 10, расположенных по краям шагового конвейера. выполнены полыми для размещения в них грузонесущих подвижных платформ.5. Обойма 9 имеет вырез 11 для свободного прохождения толкателей 8 при обратном ходе штанги, а обойма 10 - вырез 12 для
рохождения токателей 7 при прямом оде штанги б.
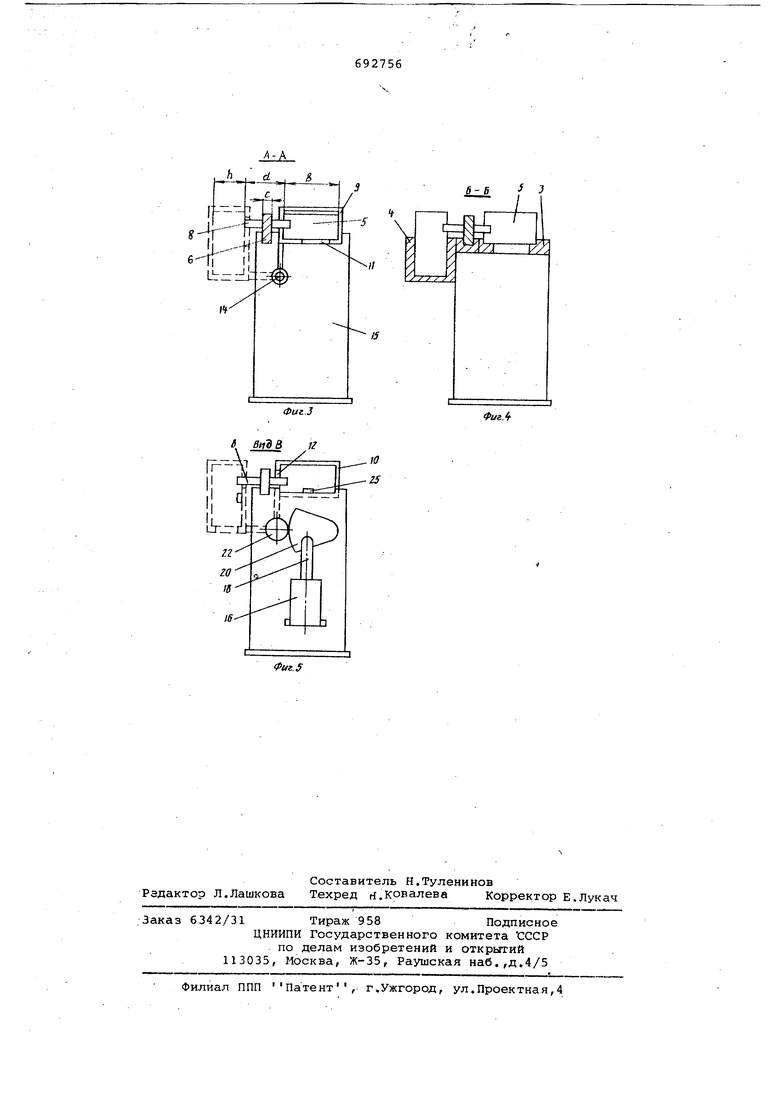
Обоймы 9 и 10 установлены соответственно на валах 13 и 14 с возожностью поворота относительно станины 15 на установленный угол от приводов поворота 16 и 17 вокруг осей ралов 13 и 14, параллельных направляющим 3 и 4.
Расстояние h, на которое удалены от грузонесущей платформы 5 оси валов 13 и 14 радиус поворота обойм 9 и 10 равен полусумме щиринь платформы 5 и зазора между платформами
5,, установленными на рабочей и возвратной ветвях 1 и 2, за вычетом половины высоты платформы 5, причем зазор по меньшей мере равен ширине толкающей штанги 6.
Приводы 16 и 17 выполнены в виде гидроцилиндров, закрепленных на станине 15, Их штоки 18 и 19 через поворотные зубчатые секторы 20 и 21, зубчатые колеса 22 и 23, закрепленные на валах 13 и 14, соединены с боймами 9 и 10.
Штанга б установлена с возможностью ее перемещения ло направляющи 23. Все направляющие - 3, 4 и 24 закреплены на станине 15.
Обоймы 9i и 10 снабжены упорами 25 для ограничения перемещения силами инерции грузонесущих платформ 5.
Пунктиром.на фиг. 3 показано положение обоймы 9 после поворота, на фиг.5 - обоймы 10, а на фиг. 2 грузонесущей платформы 10 после поворота.
Шаговый конвейер работает следующим образом.
В исходном положении (см. фиг. 1-5), штанга б находится в крайнем правом положении, а одна из грузонесущих подвижных платформ 5 на рабочей ветви 1 находится в обойм.е 9.
Включают приводы 16 и 17, с помощью которых через щтоки 18 и 19, зубчатые секторы 20 и 21, зубчатые колеса 22 и 23, валы .13 и 14 повораивают обоймы 9 и 10 на установленный угол. При этом обоймы 9 и 10, поворачиваясь под штангой 6, занимают положение, показанное на фиг. 3 и 5 пунктиром. При этом грузонесущая платформа 5 поворачивается вместе с обоймой 9.
После поворота обоймь 9 и 10 совещаются с направляющей 4, штанга б перемещается влево на величину шага, перемещая толкателями 8 платформы 5, находящиеся:на возвратной ветви 2.
Грузонесущая подвижная платформа 5, находящаяся в обойме 9, перемещается, а крайняя левая платформа 5,находящаяся на возвратной ветви 2 заталкивается в обойму 10.
При этом толкатели, проходя через грузонесущие платформы 5, находящиеся на главной ветви 1, утапливаются, сжимая пружины, и платформы 5 остается в прежнем положении.
Обоймы 9 и 10, аналогичноописанному поворачиваются в исходное положение от приводов 17 и 16. Обойма 9 поворачивается без платформы, а обойма 10 - с грузонесущей платформой 5. При прохождении штанги 6 в прямом направлении (вправо) на величину шага конвейера, толкатели 8, проходя в зоне платформ; 5 на возвратной ветви 2 утапливаются, и платформы остаются в прежнем положении,; а платформы на рабочей ветви 1 - перемещаются на шаг. При этом грузонесущая платформа 5, находящаяся в обойме 10, выходит из обоймы, а крайняя правая платформа,находящаяся на ветви возврата 1 - заталкивается в обойму 9. .
Далее цикл работы конвейера повто ряется.
Таким образом, обеспечение транспортирования грузонесущих элементов в перевернутом положении, а также выполнение предлагаемого механизма их перемещенияJ- позволит уменьшить ; габариты и упростить конструкцию : конвейера.,
Формула изобретения
Маговыйконвейер, содержащий рабочуюи возвратную ветви с направляющими, на которых установлены грузонесущиё подвижные платформы, механизм перемещения платформы по направляющим, имеющий штангу с толкателями и механизмы перемещения платформ с одной ветви на другую, о т л и ч а ю щ и и с я тем, что, с целью уп10рощения конструкции и уменьшения ее габаритов, штанга установлена между направляющими и снабжена дополнительными толкателями, которые закреплены на ее противополож11ой ос15новным толкателям стороне, а механизм .перемещения платфстрм с одной ветви на другую выполнен в виде обойм с валом для взаимодействия с приводом механизма , при этом ось
20 вала параллельна направлякндим.
Источники информации, принятые во внимание при экспертизе .
25
1.Авторское свидетельство СССР № 201221, кл. В 65 G 25/00, 1963.
2.Авторское свидетельство СССР № 232113, кл. В 65 G 25/00, 1965 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1982 |
|
SU1084198A1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |
| Установка для укладки керамических изделий на печную вагонетку | 1977 |
|
SU742145A1 |
| Автоматическая линия для изготовления и укладки строительных изделий на сушильные вагонетки | 1985 |
|
SU1247295A1 |
| Шаговый конвейер | 1978 |
|
SU781136A1 |
| Шаговый конвейер для перемещенияшТучНыХ КРупНОгАбАРиТНыХ гРузОВ | 1979 |
|
SU816886A1 |
| Автоматизированная сборочная линия | 1983 |
|
SU1174229A1 |
| СТЕНД ДЛЯ СБОРКИ ПУЧКА ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 1990 |
|
SU1748381A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
Фиг.З
IB
Фиг.
