Изобретение относится к механизации и автоматизации вспомогательных операций в механическом производстве, в частности к механизации и автоматизации перемещения изделий между транспортным средством и обрабатывающим оборудованием. Известен автооператор, содержащий не подвижное основание, поворотную стойку, Т-образную балку, плечи которой снабжены захватами, и механизм перемещения балки. Механизм перемещения балки выполнен в виде трех приводных механизмов, которые смонтированы на поворотной стойке. Каждый приводной механизм содержит электродвигатель, на выходном валу которого установлен кривощип. Кривошипы связаны с ползунами, каждый из которых в свою очередь взаимодействует с соответствующим плечом и основанием Т-образной балки. Балка с захватами осуществляет угловые и линейные перемещения в вертикальном и горизонтальном направлении 1. Однако конструкция автооператора сложна (использовано три приводных механизма с тремя электродвигателями). Кроме того, для линейного перемещения руки в вертикальной плоскости необходима синхронизация работы двух приводных механизмов и при работе механизмов подъема необхедимо отключение механизма поворота и наоборот, что является неудобным в эксплуатации. Целью изобретения является повыщение надежности и удобства эксплуатации. Поставленная цель достигается тем, что автооператор, содержащий неподвижное базовое основание, поворотную стойку, Т-образную балку, плечи которой несут схваты, а основание балки связано с механизмом перемещения балки, а также привод, снабжен щтативом, имеющим направляющие и стопор и установленным на валу привода, а механизм перемещения балки выполнен в виде кривощипа, палец которого связан с основанием Т-образной балки, причем плечи балки установлены в направляющих щтатива, Т-образная балка снабжена защелкой, взаимодействующей со стопором штатива. Кроме того, автооператор снабжен расположенными на базовом основании электромагнитами, предназначенными для взаимодействия с плечами балки. На чертеже изображена кинематическая схема автооператора. Автооператор содержит неподвижное базовое основание 1, смонтированную на нем с возможностью вращения на 360° поворотную стойку 2, Т-образную балку 3 (руку) и приводной механизм. На поворотной стойке 2 смонтирован электродвигатель 4 приводного механизма. Приводной механизм помимо электродвигателя 4 содержит кривощип 5, установленный на выходном валу последнего. Палец 6 кривощипа 5 связан с основанием Т-образной балки 3. Плечи Т-образНОЙ балки 3 расположены в направляющих 7, которые жестко связаны между собой штативом 8. Штатив 8 свободно сидит на выходном валу электродвигателя 4. Таким образом, основание Т-образной балки 3 выполняет роль шатуна, а ее плечи являются ползунами кривощипно-шатунного механизма (кривошип 5 - палец 6 - основание (шатун) - плечи (ползун) - направляющие 7). Плечи Т-образной балки 3 снабжены электромагнитными схватами 9 (или одним схватом, что является частным случаем, изображенным на чертеже). Одно из плечей Т-образной балки 3 несет на себе защелку 10, а штатив 8 снабжен электромагнитным стопором 11. На неподвижном базовом основании 1 закреплены электромагниты 12 фиксированных положений, например три, а также упоры 13, Поворотная стойка 2 снабжена приводом поворота 14, например, состоящим из электродвигателя, редуктора и червячной передачи. Если нет необходимости иметь автооператору горизонтальное перемещение, то поворотной стойки 2 может не быть. Автооператор работает следующим образом. Т-образная балка 3 (рука) поднята в крайнее верхнее положение и зафиксирована стопором 11, а штатив 8 находится в зоне действия одного из электромагнитов 12 (например Б). Подается напряжение на стопор 11, защелка 10 освобождается. Одновременно подается напряжение на один из электромагнитов 12 (Б), а электродвигатель 4 включается. Кривощип 5 вращается и через палец 6 воздействует на Т-образную балку 3. Плечи балки. 3 перемещаются по вертикали (вниз) в направляющих 7. Схват 9 опускается в тару с деталями и при подаче на него напряжения детали захватывают ся. При дальнейщем вращении кривошипа 5 (или реверсе электродвигателя 4), Т-образная балка 3 поднимается, перемещаясь вертикально вверх по направляющим 7. Отключается электромагнит 12 (Б), а стопор 11 срабатывает, и Т-образная балка 3 фиксируется на определенной высоте. Зафиксированная балка 3 не может перемещаться по вертикали и поэтому поворачивается вместе с направляющими 7 и щтативом 8. Схвату 9 сообщаются угловые перемещения в вертикальной плоскости до упора 13. Электромагнитный схват 9 отключается и детали передаются на следующую позицию или сбрасываются в тару. При дальнейщем вращении кривошипа (или реверсе электродвигателя 4), штатив 8 проходит мимо одного из электромагнитов 12, которые включаются по программе, например, А-Б-В. Электромагнит 12 (А) включается, и срабатывает стопор 11. Т-образная балка 3 освобождается и опускается вместе
со схватом 9 в тару с деталями. Цикл пов-трех электродвигателей применен одии, слеторяется.довательно, не требуется синхронизация
Такое выполнение предлагаемого уст-работы двигателей и соблюдение поочередройства позволяет повысить надежность иности их включения. Автооператор удобен
значительно упростить конструкцию: вместов эксплуатации и имеет небольшие габариты.
1085756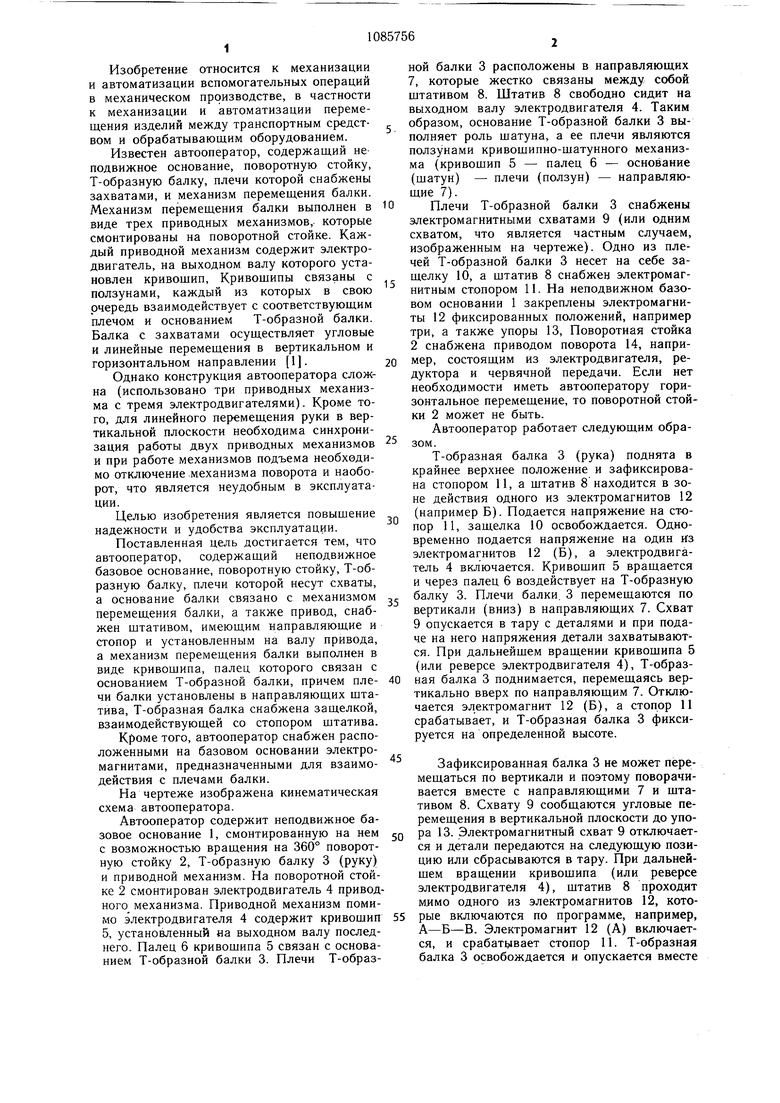

| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1975 |
|
SU529056A1 |
| Коллектор фракций | 1983 |
|
SU1125046A1 |
| Устройство для поштучной выдачи деталей | 1983 |
|
SU1143573A1 |
| Манипулятор | 1985 |
|
SU1276484A1 |
| Устройство для ориентированной подачи деталей | 1985 |
|
SU1294566A1 |
| Устройство для перемещения материала | 1986 |
|
SU1355331A1 |
| Устройство для ориентации деталей | 1987 |
|
SU1516307A1 |
| Автомат для контроля и сортировки деталей | 1986 |
|
SU1377160A1 |
| ШТАТИВ | 1997 |
|
RU2117339C1 |
| Автомат для сборки крепежных элементов | 1981 |
|
SU1007899A1 |
1. АВТООПЕРАТОР, содержащий неподвижное базовое основание, поворотную стойку, Т-образную балку, плечи которой несут схваты, а основание балки связано с механизмом перемещения балки, а также привод, отличающийся тем, что, с целью повышения надежности работы и удобства в эксплуатации, он снабжен штативом, имеющим направляющие и стопор и установленным на валу привода, а механизм перемещения балки выполнен в виде кривощипа, палец которого связан с основанием Т-образной балки, причем плечи Т-образной балки установлены в направляющих штатива, Т-образная балка снабжена защелкой, взаимодействующей со стопором штатива. 2. Автооператор по п. 1, отличающийся тем, что он снабжен расположенными на базовом основании электромагнитами, предназначенными для взаимодействия с плечами балки. (Л 00 сд СП О5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автооператор | 1975 |
|
SU529056A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
