2. Устройство по n«1j о т л и чающееся тем, что привод радиального перемещения груза представляет собой пневмоцилиндр с пружиной растяжения и регулятором давления, при этом полости пневмоцилиндра сообщены с задатчиками радиального перемещения груза.
З.Устройство по п.1,0 т л и ч а ющ е е с я тем,что траверса связана с продолжением одного из меньших звеньев параллелограмма посредством роликов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Уравновешивающий подъемник | 1981 |
|
SU979263A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| Уравновешивающее подъемное устройство | 1976 |
|
SU655639A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Манипулятор с уравновешиванием груза | 1989 |
|
SU1705229A1 |
| Манипулятор Ильина | 1983 |
|
SU1148777A1 |
| Уравновешивающий стреловой подъемник | 1987 |
|
SU1594126A1 |
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
1 .УРАВНОВЕШИВАЙЩЕЕ ПОДЪЕМНОЕ УСТРОЙСТВО, содержащее корпус с вертикальным и горизонтальным пазами, в которых шарнирно установлена стрела в виде параллелограмма с грузозахпатным органом, закрепленным на to Фиг.1 ---../ продолжении одного из меньших звеньев параллелограмма, и привод вертикального перемещения груза, отличающееся тем, что, с целью повьквения безопасности в работе и улучшения условий эксплуатации, оно выполнено с траверсой, юарнирно закрепленной на вертикальном промежуточном элементе, которым снабжено продолжение одного из меньших звеньев параллелограмма, а также с приводом радиального перемещения груза, установленным между корпусом исвязанным с шарниром перемещения стрелы в горизонтальном пазу, с элементами управления и задатчиками радиального перемещения груза, установленны(П ми на траверсе, при этом траверса установлена с возможностью радиальс ного перемещения. э эо 12 :л 4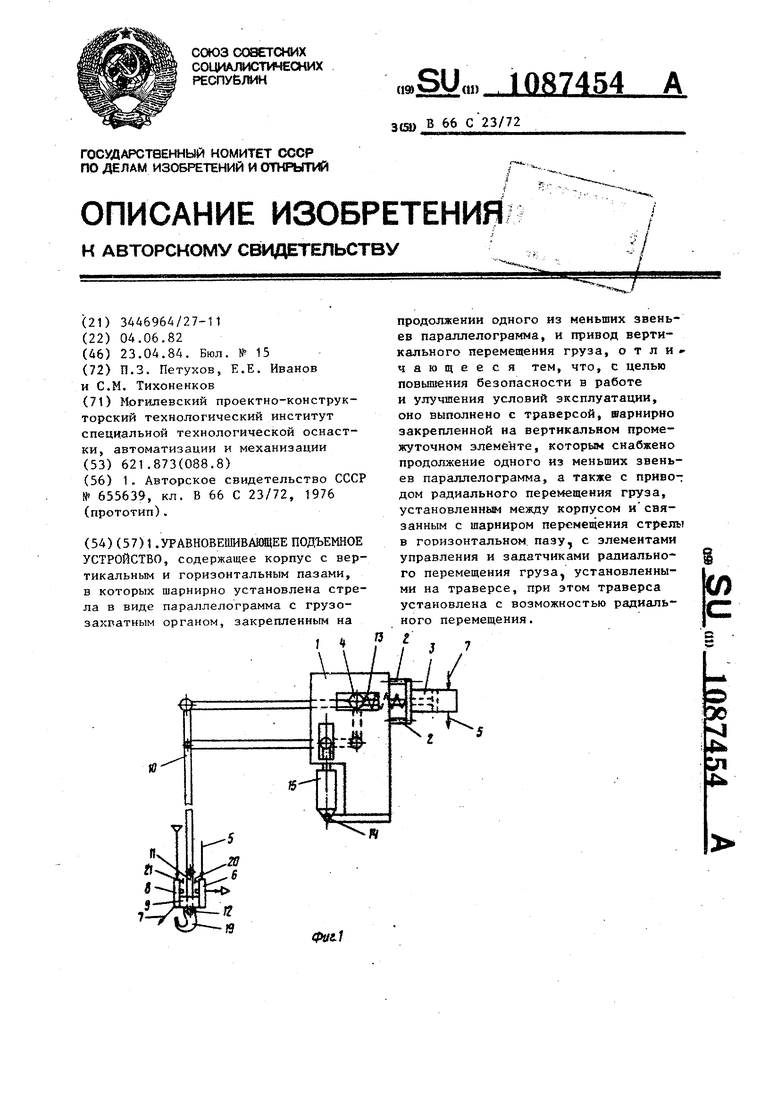
Изобретение относится к подъемно-транспортным машинам, в частности к уравновешивающим подъемным устройствам.
Известно уравновешивающее подъемное устройство, содержащее корпус с вертикальным и горизонтальным , в которых шарнирно установлена стрела в виде параллелограмма с грузозахватным органомj закрепленнь м на продоллсении одного из меньших звеньев параллелограмма, и привод вертикального перемещения груза .Л
Недостатком данного устройства является недостаточная уравновешенность груза в различных точках зоны обслуживании, что обусловливает опасность в работе и усложняет условия эксгшугтацйя,
Цель изобретения - повышение безопасности в работе и лучшение.условий эксплуатации.
Поставленная цель достигается тем что уравновешивающее подъемное устройство j с.одгржаЕ ее корпус с вертикальным и т.оризонталькым пазамиj в которых шарнирно установлена стрела в виде паратзлелограмма с грузозахватным органом, закрепленным на продолжении одного КЗ- меньших звеньев параллелограммаS и привод вертикального перемещения груза, выполнено с траверсой, шарниргю закрепленной на вертикальном промежуточном элементе, которым снабжено продолжение одного из меньших звеиьев параллелограмма, а также с приводом радиального перемещения груза, установленным между корпусом и связанным с гаарннром перемещения стрелы в горизонтальном пазу, с элементами управления и задатчиками радиального перемещения груза, установленньпчи на траверсе, при этом траверса установлена с возможностью радиального перемещения.
При этом привод радиального перемещения груза представляет собой пневмоцилиндр с пружиной растяжения и регулятором давления, при этом полости пневмоцилиндра сообщены с задатчиками радиального перемещения груза.
Кроме того, траверса связана с продолжением одного из меньших звеньев параллелограмма посредством роликов.
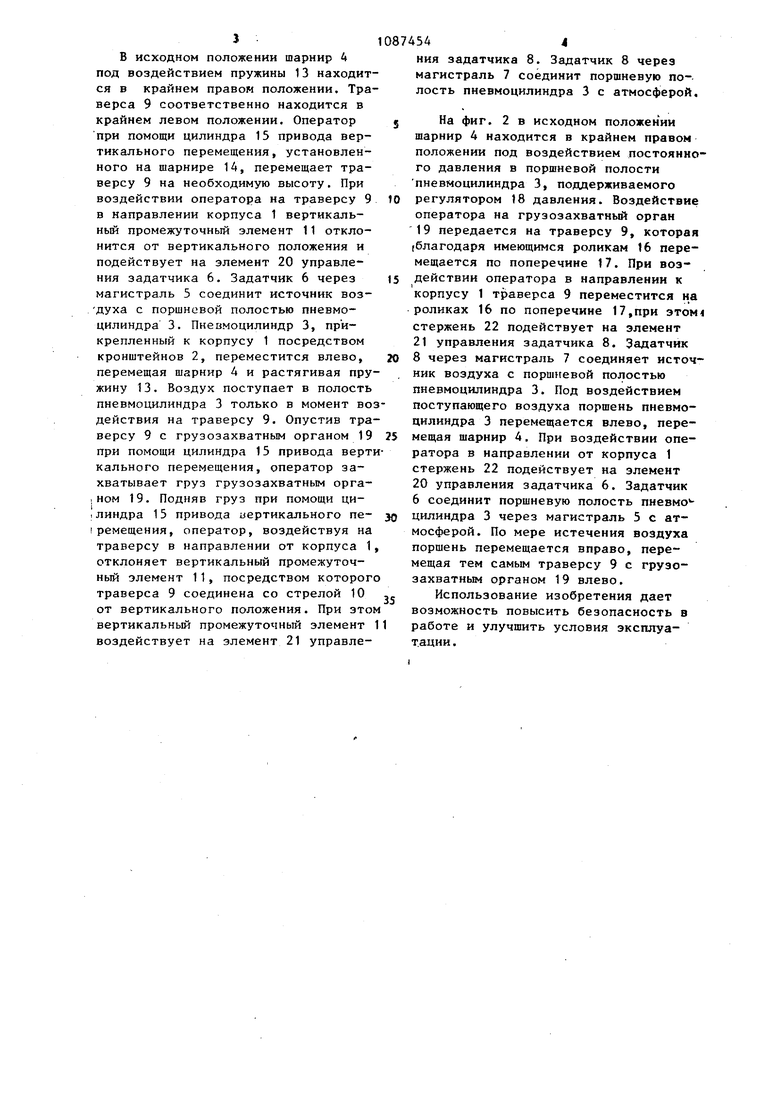
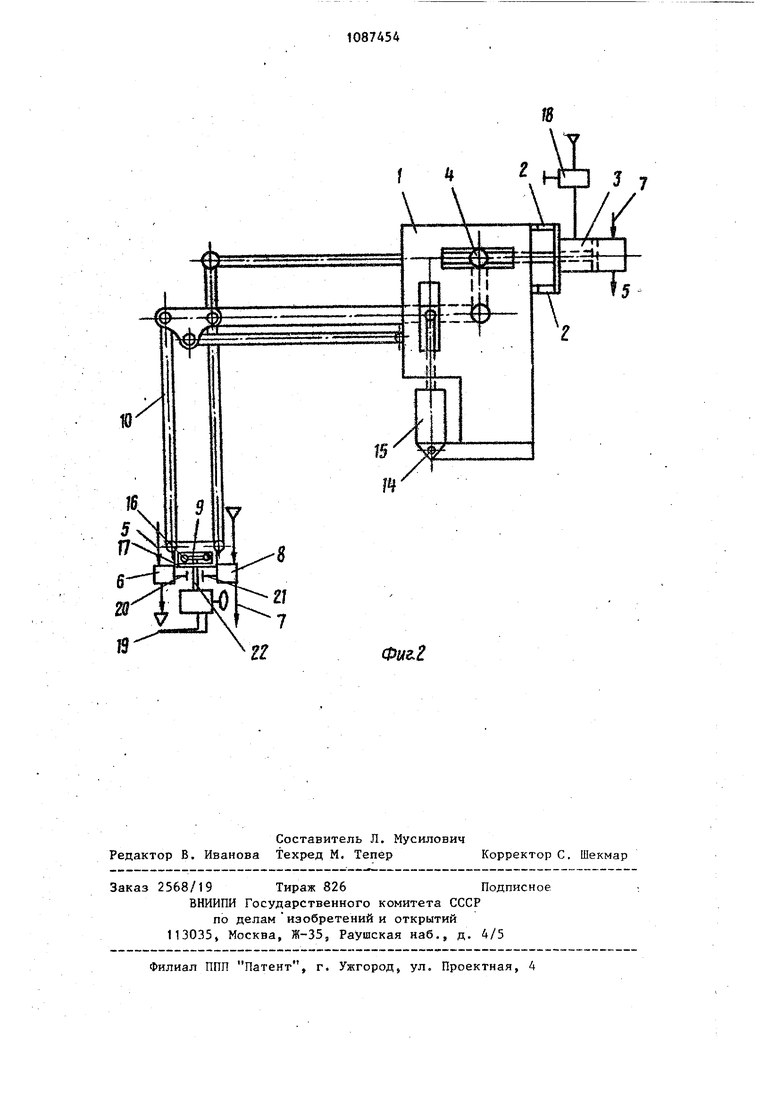
На фиг, 1 представлено устройство, общий вид; на фиг. 2 - то же, но с соединением траверсы со стрелой посредством роликов.
Устройство содержит корпус 1 с вертикальным и горизонтальным пазами, К корпусу 1 при помощи кронштейнов 2 прикреплен пневмоцилиндр 3 шток которого прикреплен к шарниру 4 Поршневая полость цилиндра 3 магистралью 5 соединена с задатчиком 6, а магистралью 7 - с задатчиком 8. Задатчики 6 и 8 установлены на грузовой траверсе 9, которая связана с стрелой 10 при помощи вертикального промегкуточного элемента 11 и шарнира 12. Между шарниром 4 и пневмоцилиндром 3 установлена пружина 13 растяжения. К корпусу 1 через шарнир 14 прикреплен цилиндр 1 5 привода вертикального перемещения груза.
Траверса 9 связана со стрелой 10 посредством роликов 16 с возможносTbFo перемещения по поперечине 17. В штоковой полости пневмоцилиндра 3 поддерживается постоянное давление регулятором 18 давления. К траверсе 9 крепится грузозахватный орган 19. Задатчики 6 и 8 снабжены элементами 20 и 21 управления. Грузозахватный орган 19 крепится к траверсе 9 через стержень 22.
Устройство работает следующим образом.
В исходном положении шарнир 4 под воздействием пружины 13 находится в крайнем правом положении. Траверса 9 соответственно находится в крайнем левом положении. Оператор при помощи цилиндра 15 привода вертикального перемещения, установленного на шарнире 14, перемещает траверсу 9 на необходимую высоту. При воздействии оператора на траверсу 9 в направлении корпуса 1 вертикальный промежуточный элемент 11 отклонится от вертикального положения и подействует на элемент 20 управления задатчика 6. Задатчик 6 через магистраль 5 соединит источник воз-духа с поршневой полостью пневмоцилиндра 3. Пневмоцилиндр 3, прикрепленный к корпусу 1 посредством кронштейнов 2, переместится влево, перемещая шарнир 4 и растягивая пружину 13. Воздух поступает в полость пневмоцилиндра 3 только в момент воздействия на траверсу 9. Опустив траверсу 9 с грузозахватным органом 19 при помощи цилиндра 15 привода вертикального перемещения, оператор захватывает груз грузозахватным оргаI ном 19. Подняв груз при помощи ци1линдра 15 привода вертикального пе ремещения, оператор, воздействуя на траверсу в направлении от корпуса 1, отклоняет вертикальный промежуточный элемент 11, посредством которого траверса 9 соединена со стрелой 10 от вертикального положения. При зтом вертикальный промежуточный элемент 1 воздействует на элемент 21 управления задатчика 8. Задатчик 8 через магистраль 7 соединит поршневую по-лость пневмоцилиндра 3 с атмосферой.
На фиг. 2 в исходном положении шарнир 4 находится в крайнем правом положении под воздействием постоянного давления в поршневой полости пневмоцилиндра 3, поддерживаемого регулятором 18 давления. Воздействие оператора на грузозахватный орган
19передается на траверсу 9, которая (благодаря имеющимся роликам 16 перемещается по поперечине 17. При воздействии оператора в направлении к корпусу 1 траверса 9 переместится на роликах 16 по поперечине 17,при этом стержень 22 подействует на элемент
21 управления задатчика 8. Задатчик 8 через магистраль 7 соединяет источник воздуха с поршневой полостью пневмоцилиндра 3. Под воздействием поступающего воздуха поршень пневмоцилиндра 3 перемещается влево, перемещая шарнир 4. При воздействии оператора в направлении от корпуса 1 стержень 22 подействует на элемент
20управления задатчика 6. Задатчик 6 соединит поршневую полость пневмо цилиндра 3 через магистраль 5 с атмосферой. По мере истечения воздуха поршень перемещается вправо, перемещая тем самым траверсу 9 с грузозахватным органом 19 влево.
Использование изобретения дает возможность повысить безопасность в работе и улучшить условия эксплуатации .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Уравновешивающее подъемное устройство | 1976 |
|
SU655639A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
