J12
Изобретение относится к механизации погрузочно-разгрузочных работ, а именно к уравновешивающим подъемникам.
Цель изобретения - повышение надежности работы.
На фиг. 1 изображен уравновешивающий подъемник, общий вид; на фиг. 2 принципиальная гидравлическая схема системы управления уравновешивающим подъемником.
Система управления уравновешивающим подъемником содержит вьшолненную в виде параллелограмма стрелу I, шарнирно закрепленную на поворотной части 2 колонны 3. На продолжении меньшего звена 4 параллелограмма установлен датчик 5 веса с рукояткой 6 управления и грузозахватным органом 7. На противоположном конце стрелы закреплен противовес 8. На поворотно части 2 установлен стабилизатор 9 давления и силовой пневмоцилиндр 10, связанньй со стрелой 1.
.Датчик веса имеет основнлло А и дополнительную Б камеры давления, отделенные от каналов 11 и 12 входа, соединенных с напорной пневмомагист- ралъю 13, и каналов 14,и 15 выхода, соединенных с атмосферой, подпружиненными клапанами 16 и 17, на которые воздействуют толкатели 18 и 19, синхронно перемещающиеся под действием подвески 20 грузозахватного органа 7, мембраны 21 или рукоятки 6 управления. Толкатель 18 имеет демпфирующие элементы 22 и 23 для плавного изменения проходного сечения каналов 11 и 14.
Стабилизатор 9 давления имеет две камеры В и Г, разделенные мембраной 24, которая через толкатель 25 воздействует на подпружиненный клапан
26, отделяющий канал 27 входа, соеди- ., необходимое для создания усилия.
ненный магистралью 28 с полостью Д пневмоцилиндра 10, от камеры В, а через толкатель 29 воздействует на подпружиненный клапан 30, отделяющий канал 31 входа соединенный с напорной пневмомагистралью 13, от камеры Г.
Камера А датчика 5 веса соединена пневмомагистралью 32 зшравления с камерой В стабилизатора 9 давления. Камера Б датчика 5 веса соединена пневмомагистралью 33 с полостью Е пневмоцилиндра 10. Камера Г стабилизатора 9 давления пневмомагистралью 34 сое50
55
уравновешивающего вес грузозахват органа 7 с грузом.
Для подъема грузозахватного ор на 7 с грузом или без груза опера поворотом рукоятки 6 управления в непосредственно перемещает толкат ли 18 и 19 вниз, открьшая канал 1 входа камеры А и канал 15 выхода меры Б датчика 5 веса. При своем ремещении толкатель I8 постепенно увеличивает проходное сечение кан 11 входа. Давление в камерах А и плавно увеличивается, перемещая м брану 24 и толкатель 2.9 стабилиза
0
5
динена с полостью Д пневмоцилинд- ра 10.
Система управления От перегрузки защищена предохранительным клапаном , 35, от аварийного падения давления в источнике сжатого воздуха - обратным клапаном 36.
В исходном положении все каналы системы управления перекрыты клапанами. При нагружении грузозахватного органа 7 он через систему подвесок 20 перемещает толкатели 18 и 19 вниз, которые, воздействуя на клапаны 16 и °17, открывают канал II входа .камеры А и канал 15 выхода камеры Б датчика 5 веса. Воздух из напорной магистрали 13 поступает в камеру А давления и по магистрали 32 - в камеру В стабилизатора 9 давления. Мембрана 24, прогибаясь, через толкатель 29 воздействует на клапан 30, открывая канал 31 входа в камеру Г. Воздух из напорной магистрали 13 поступает в камеру Г и по магистрали 34 - в полость Д пневмоцилиндра ГО. Полость Е пневмоцилиндра через камеру Б датчика 5 веса соединяется с атмосферой. Давление в камере А повьш1ается и, когда достигнет величины, при которой под действием мембраны 21, толкатели 18 и 19 возвращаются в исходное положение, клапаны 16 и 17 перекроют соответственно канал 1 входа и канал 15 выхода датчика 5 -5 веса. При достижении равенства давлений в камерах Г и В стабилизатора 9 давления, а следовательно, в полости Д пневмоцилиндра 10 и камере А датчика веса мембрана 24 с толкателем 29 возвращаются в исходное положение, и клапан 30 перекроет подачу воздзлха. Таким образом, в полости Д пневмоцилиндра 10 создается давление.
0
0
0
5
уравновешивающего вес грузозахватного органа 7 с грузом.
Для подъема грузозахватного органа 7 с грузом или без груза оператор поворотом рукоятки 6 управления вверх непосредственно перемещает толкатели 18 и 19 вниз, открьшая канал 11 входа камеры А и канал 15 выхода камеры Б датчика 5 веса. При своем перемещении толкатель I8 постепенно увеличивает проходное сечение канала 11 входа. Давление в камерах А и Б плавно увеличивается, перемещая мембрану 24 и толкатель 2.9 стабилизато3
pa 9 давления вниз, клапан 30 открывает канал 31 входа и воздух из напорной магистрали 13 через камеру Г по магистрали 34 поступает в по- - лость Д пневмоцилиндра 10, из полости 5 Е по магистрали 33, камеру Б и канал 15 выхода воздух вытесняется в атмосферу .
12947
Формула изобретени
Система управления уравновешивающим подъемником, содержащая источник сжатого воздуха, соединенный с одной полостью силового органа посредством напорной магистрали, в которой установлено устройство изменения давления в силовом органе, соединенное с магистралью управления, снабженной дат5 fO
47554
чиком массы, имеющим толкатель и камеру давления с каналами входа и сброса, сжатого воздуха, отделенными друг от друга мембраной с клапаном, отличающаяся тем, что, с целью повышения надежности работы, датчик массы,выполнен с рукояткой управления и дополнительной камерой давления с каналом входа, отделенным от канала выхода первой камеры давления мембраной с клапаном и толкателем, при этом упомянутая дополнительная камера дайления датчика массы соединена посредством силовой магистрали со второй полостью силового органа, а рукоятка управления установлена с возможностью действия с толкателями основной и дополнительной камер давления.
5
Ю
Составитель А. Шмалько Редактор Н. Гунько Техред В.Кадар . Корректор Н. Король
™---.- -., д, ..-
Заказ 551/23 Тираж 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектнай, 4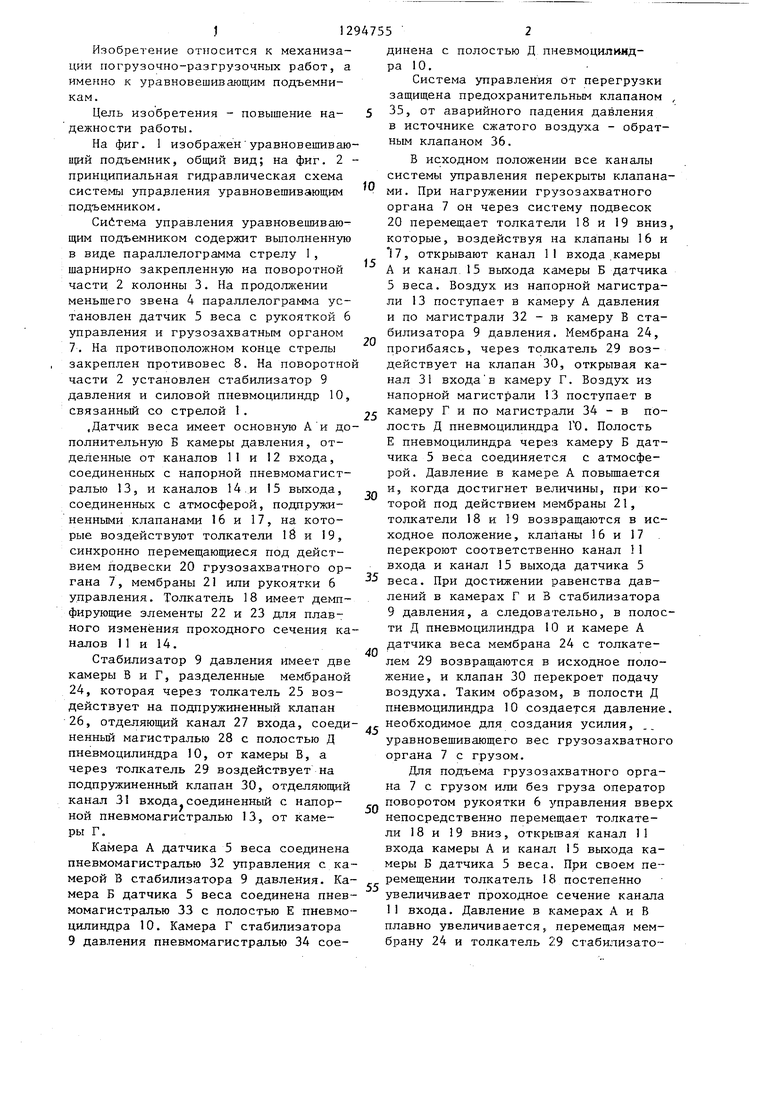
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Система управления уравновешивающим подъемником | 1983 |
|
SU1221191A2 |
| Система управления уравновешивающим подъемником | 1984 |
|
SU1199738A2 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Устройство для управления уравновешивающим стреловым подъемником | 1988 |
|
SU1650561A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Уравновешивающий подъемник | 1984 |
|
SU1184799A1 |
Изобретение относится к области подъемно-транспортного машиностроения, а именно к системе управления уравновешивалщего подъемника. Цель изобретения - повышение надежности работы. Система управления уравновешивающим подъемником содержит стрелу, шарнирно закрепленную на поворотной части колонны, датчик веса 5 с рукояткой управления 6 и грузозахватным органом 7, противовес, стабилизатор давления 9, силовой пневмоцилиндр 10. Для подъема грузозахватного органа 1 с грузом или без груза оператор поворотом рукоятки управления 6 вверх непосредственно перемещает толкаге- ли 18, 19 вниз, открывая каналы 11 и 15 датчика веса 5. 2 ил. tc со 4 ел 01
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
