В табл.2 переменной vo обозначено состояние звена 7 в предыдущем нулевом цикле зевообразования. а переменной vi - состояние того же звена в первом цикле зевообразования. Переменной wi обозначено воздействие, оказываемое на входное звено 5 зтого механизма. При воздействии ножа на толкатель 5, направленном вниз по стрелке г, звено 7 переместится влево и займет противоположное положение, стрелка д. Через нижнее положение звено 6 переходит, например, под воздействием силы инерции. Толкатель 5 в верхнее положение возвращается под действием пружины,
Из табл.2 следует, что для сохранения предыдущего состояния vo звена 7 в следу5
0
5
В табл.3 переменной xi обозначено состояние рычага 11 в предыдущем, нулевом, цикле зевообразования, а переменной Х2 - состояние того же рычага в следующем, первом цикле. Переменной vi обозначено воздействие, оказываемое на эксцентрик со стороны водила 9. При вращении водила (в течение одного цикла зевообразований) вращается эксцентрик 10, перемещая рычаг 11 из одного конечного положения в другое.
Из табл.3 следует, что для сохранения предыдущего состояния рычага 11. полученного им в нулевом цикле зевообразований, эксцентрик 10 должен находиться а состоянии покоя. , а , поз.1 и 3, а для изменения состояния рычага 11 на противоположное эксцентрик должен вращаться, Х2-Х1, поз.2 и 4.
Таким образом, для первого цикла зевообразования логическая функция состояний
эвена 11 описывается функцией (см.формулу 6 и табл.3) «,
X2 XW1+ X1V1.(9)
Из формулы (9) следует, что в третьем такте управления новое состояние звена 11 определяется (после переустановки) путем логического суммирования состояния звена 9, получившего команду от переключателя 7 и состояния эксцентрика 10, сохранившего свое состояние от предыдущего цикла управления.
При подстановке в формулу (8) известного значения wi, см. формулу (1), а в формулу (9) вычисленного значения vi получим состояния выходных звеньев 7 и 11 в зависимости от элементов ао и az заданного раппорта, выраженных функциями;
vi aia2+aia2, , что соответствует значениям, данным на диаграмме фиг.2.
В связи с тем, что структура команды управления формируется с учетом предыдущего и будущего состояний ремизы, становится возможным согласовывать программу зевообразований с рисунком на ткани и производить розыск раза простым вращением главного вала каретки на один оборот назад, что значительно повышает удобство обслуживания.
Формула изобретения Программирующее устройство к ротационной ремизоподъемной каретке ткацкого станка, содержащее установленные по
числу ремиз на остове каретки толкатели, один конец каждого из которых установлен с возможностью взаимодействия с ножом, соединенным с приводом каретки, а другой соединен со средством переключения силового привода ремизы, средство считывания программы зевообразования, имеющее программоноситель и для каждой ремизы суммирующий рычаг, выполненный в виде коромысла, ось которого установлена на
стержне, шарнирно соединнном с толкателем, основную считывающую иглу, шарнирно соединенную с одним из плеч суммирующего рычага и установленную в возможностью считывания сигнала, предшествующего данному циклу зевообразования, и дополнительную считывающую иглу, установленную с возможностью считывания сигнала, последующего данному циклу зевообразования, отличающееся тем,
что, с целью упрощения конструкции, каждая дополнительная считывающая игла шарнирно соединена с вторым плечом соответствующего суммирующего рычага.
§
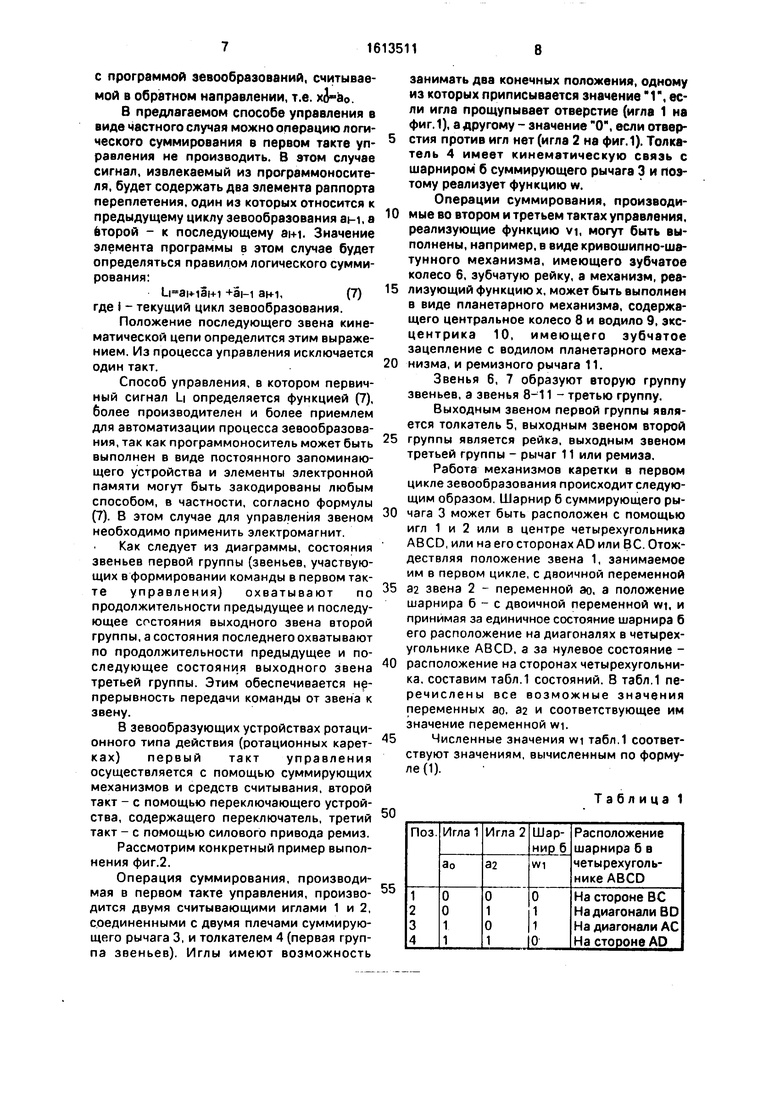
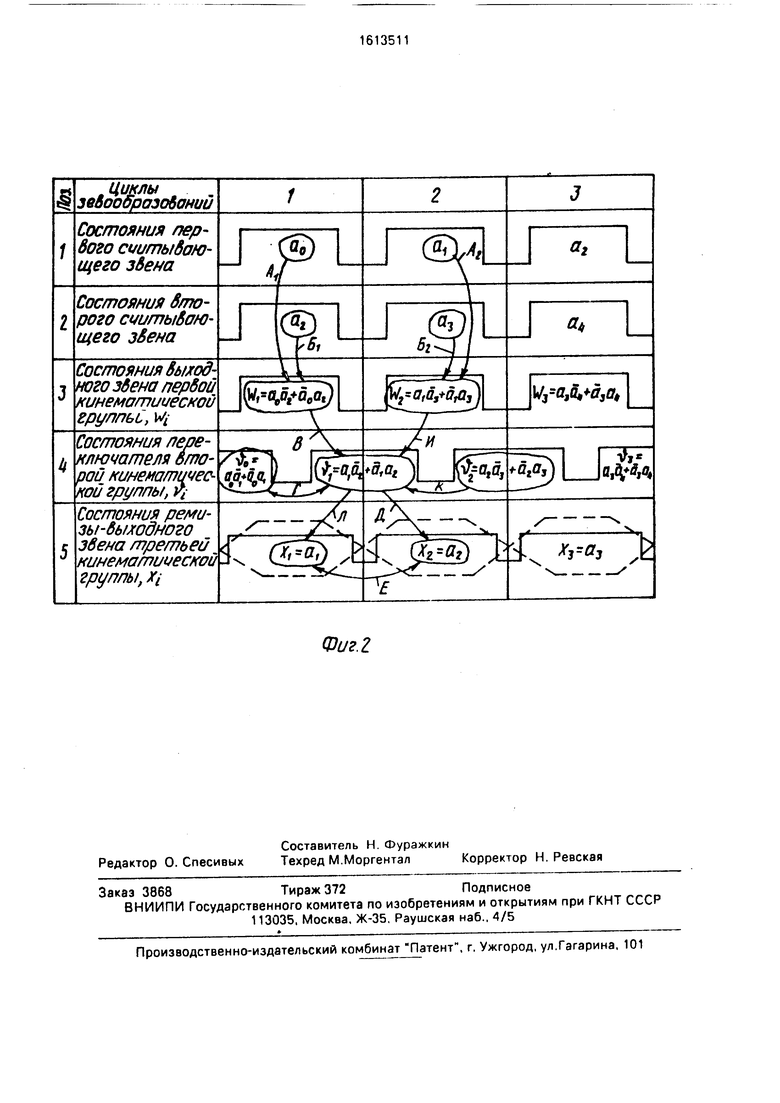
, Циклы звбооорозобаний
1
Состояния первого cijumbiбающего з&ена
г
Состояния второго CifUrnblBOH)щего зВена
Состояния 5б//од- ного звена первой, кинемогпииескои группьС, К
Состояния лере- нлю(/атбля второй кинематической гр(/ппы, Vi
Состояния ремизы-выходногозвена третьей нинемати еской 2руппы, Xi



| название | год | авторы | номер документа |
|---|---|---|---|
| Программирующее устройство к ротационной ремизоподъемной каретке ткацкого станка | 1986 |
|
SU1613510A1 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА К ТКАЦКОМУ СТАНКУ | 1995 |
|
RU2090675C1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1976 |
|
SU609796A1 |
| Ремизоподъемная каретка ткацкого станка | 1979 |
|
SU903398A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1979 |
|
SU1087580A2 |
| Ремизоподъемная каретка ткацкого станка | 1981 |
|
SU979535A2 |
| Ремизоподъемная каретка ткацкого станка | 1986 |
|
SU1331920A1 |
| Устройство для переключения ремизоподъемной каретки ткацкого станка на обратный ход | 1986 |
|
SU1461781A1 |
| Ротационная ремизоподъемная каретка к ткацкому станку | 1990 |
|
SU1721136A1 |
Изобретение относится к текстильному машиностроению и предназначено для использования на ротационной ремизоподъемной каретке ткацкого станка и позволяет повысить удобство обслуживания путем облегчения операции розыска "раза". Розыск "раза" осуществляется вращением главного вала каретки на один оборот назад. Считывание программы производится двумя иглами 1 и 2 и посредством суммирующего рычага 3 передается на исполнительные элементы. Игла 1 считывает сигнал предшествующего, а игла 2 - сигнал последующего данному циклу зевообразования. 2 ил.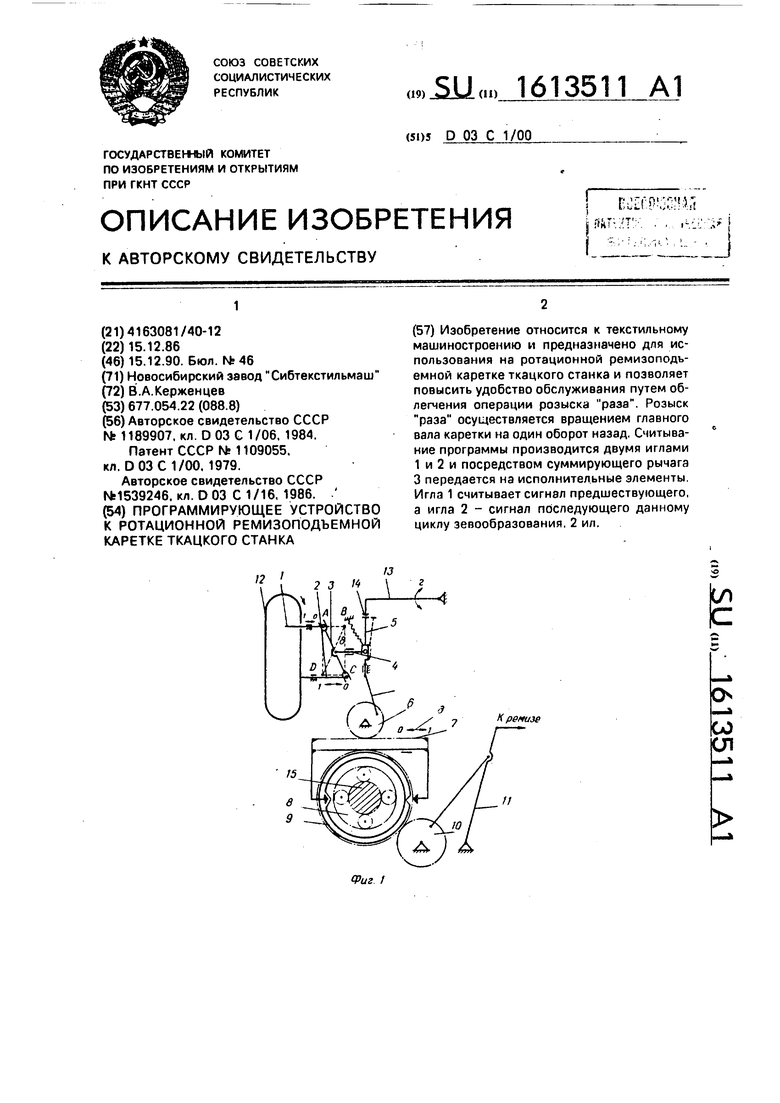
Фиг.2
