Изобретение относится к текстильному машиностроению и предназначено для использования на скоростныхткацких станках при выработке мелкоузорчатых тканей.
Цель изобретения - упрощение конст-
РУК14ИИ.
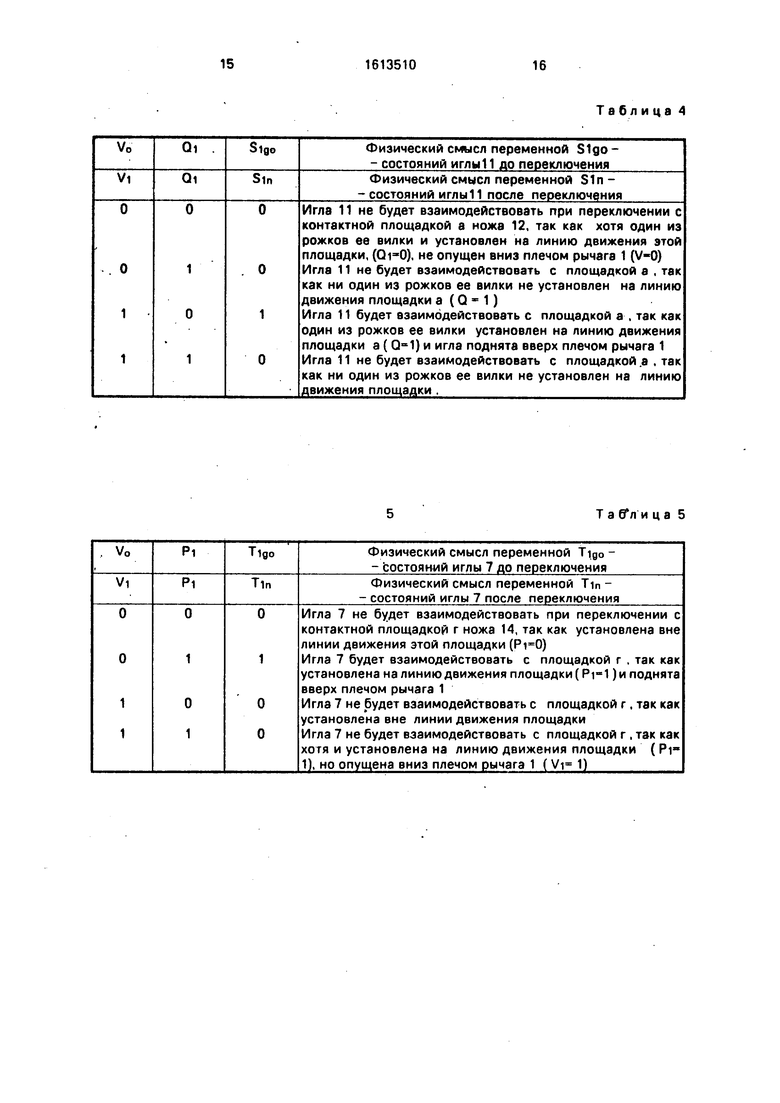
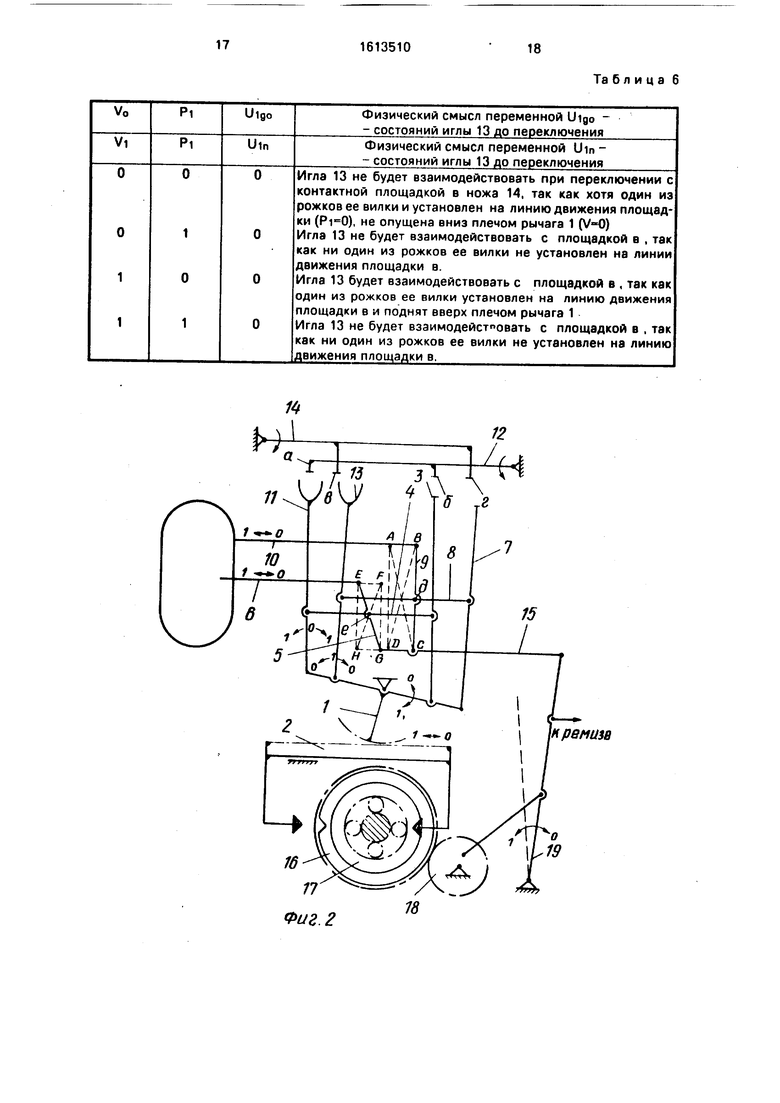
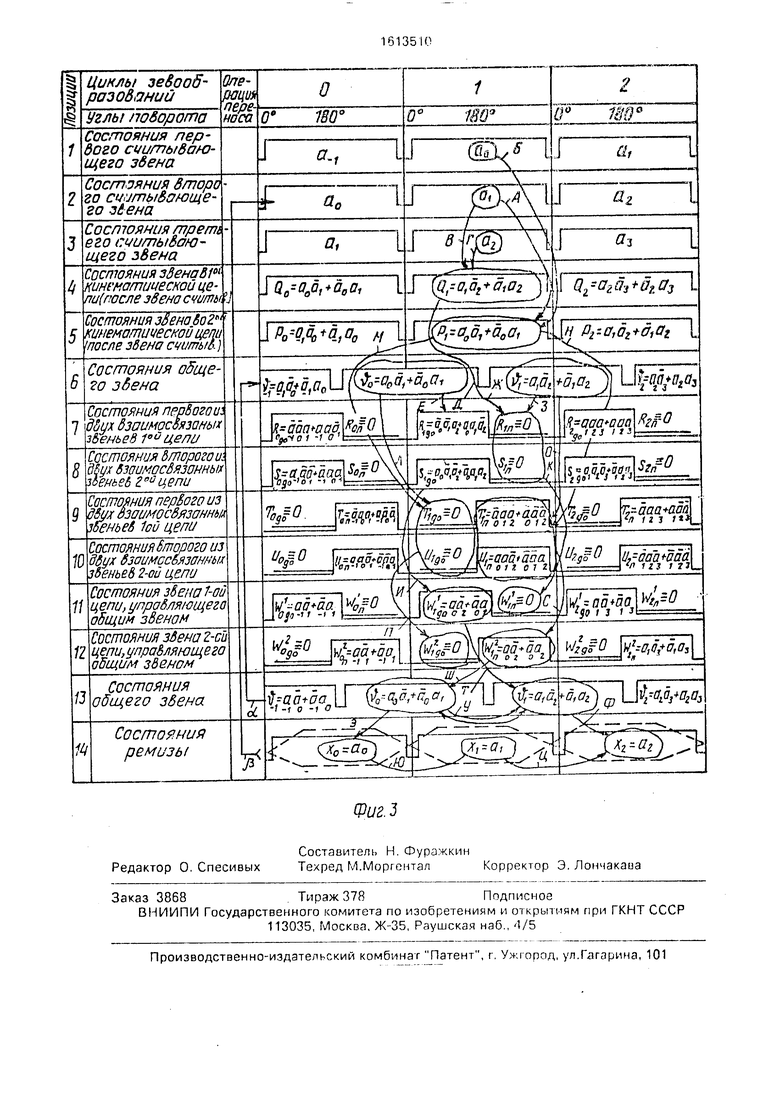
На фиг.1 показана схема устройства, средство контроля которого имеет считывающую иглу; на фиг.2 - то же, имеет связь с выходным элементом силового привода ре- миз; на фиг.З -диаграмма процесса управления движением ремиз.
Программирующее-устройство ротационной ремизоподъемной кареткой имеет две цепи управления каждой ремизой, свя- занной общим для них балансирам 1 с пе- реключател ем 2 силового привода. Цепь управления прямым ходом ремизы имеет толкатель 3, соединенный стержнем 4 с суммирующим рычагом 5 и основной счи- тывающей иглой 6, а цепь управления обратным ходом ремизы имеет толкатель 7, соединенный стержнем 8 с суммирующим рычагом 9 и дополнительной считывающей иглой 10. Толкатель 11 связан посредством стержня 4 с толкателем 3 инверсно по отношению к контактным площадкам а и б ножа 12, а толкатель 13 - посредством стержня 8 с толкателем 7 инверсно по отношению к контактным площадкам виг ножа 14. Толкатели 11 и 13 имеют вилкообразные концы. Устройство имеет средство контроля положением ремиз, которое имеет считывающую иглу 15 (фиг.1) или тягу 15 (фиг.2) посредством которых соединены суммирующие рычаги 5 и 9. Силовой привод ремизы (не показана) имеет планетарный механизм с водилом 16 и центральным колесом 17, ремизный эксцентрик 18, кинематически свя- занныйчерезрычаг 19сремизой. Программа зевообразоваиия нанесена на картон 20, с которым взаимодействуют считывающие иглы 6, 10 и 15 (фиг.1). Тяга 15 (фиг.2) связана с рычагом 19. Основная считывающая игла установлена с возможностью считыва- ния сигнала, предшествующего данному циклу зевообразования, дополнительная считывающая игла 10 - сигнала последующего данному циклу зевообразования, а игла 15 - сигнала, соответствующего данному циклу зевообразования.
Суммирующий рычаг 15 расположен в кинематической цепи после считывающей иглы 6 и предназначен для повторения состояний балансира 1, принимаемых им в предыдущем цикле зевообразования, рычаг 9 расположен после считывающей иглы 10 и предназначен для повторения состояний балансира 1, принимаемых им в предыдущем цикле зевообразования.
Связанные друг с другом инверсно толкатели 3. 11,7 и 13 взаимоустанавливаются по отношению к контактным площадкам а, б и в, г ножей 12, 14 так, что если одни из концов вилки толкателей 11 и 13 установлены на линию движения соответствующих контактных площадок а, в ножей 12,14 так. что могут взаимодействовать с последними (как, например, толкатель 13 на фиг.1 и 2), то верхние концы толкателей 3 и 7 будут установлены вне линии движения площадок б и г ножей 12,14 и не могут взаимодействовать с последними.
С другой стороны, если толкатели 3 и 7 установлены на линию движения площадок б и г ножей 12 и 14 и могут взаимодействовать с последними (как, например, толкатель 3 на фиг.1 и 2), то выемки вилок толкателей 11 и 13 будут установлены против соответствующих площадок ножей и не могут с ними взаимодействовать.
За единичные положения толкателей 3 и 7 приняты такие их положения, в которых они установлены на линию движения соответствующих площадок ножей и при этом должно происходить взаимодействие их в момент движения ножей вниз и стопорения солнечного колеса 17 планетарного механизма. В этом случае вращение будет производить водило 16 и это его состояние дринято за единичное.
Работа устройства происходит следующим образом.
В каждом цикле управления команду на движение ремизы формируют с помощью двух кинематических цепей управления ремизой и звена, общего для обоих кинематических цепей, и в котором в процессе формирования команды звенья переустанавливаются в соответствии с элементами программы зевообразований, звенья каждой кинематической цепи, расположенные после звеньев, производящих считывание, устанавливают в состояния, соответствующие состояниям общего звена; для одной кинематической цепи - в состояние, соответствующее состоянию общего звена в предыдущем цикле управления, для второй кинематической цепи - в.состояние, соответствующее состоянию общего звена последующем цикле управления, после чего суммируют положения этих звеньев с текущим положением общего звена.
Команду, получаемую в результате суммирования в каждой кинематической цепи, разделяют на две части с помощью двух звеньев, взаимоустанавливаемых инверсно по отношению к звену, передающему информацию.
В соответствии с изобретением переключатель 2 привода ремизы в ротационной каретке можно рассматривать в качестве общего звена, входящего в цепь управления ремизой, и организовать управление им с помощью двух отдельных кинематических цепей (см.диаграмму).
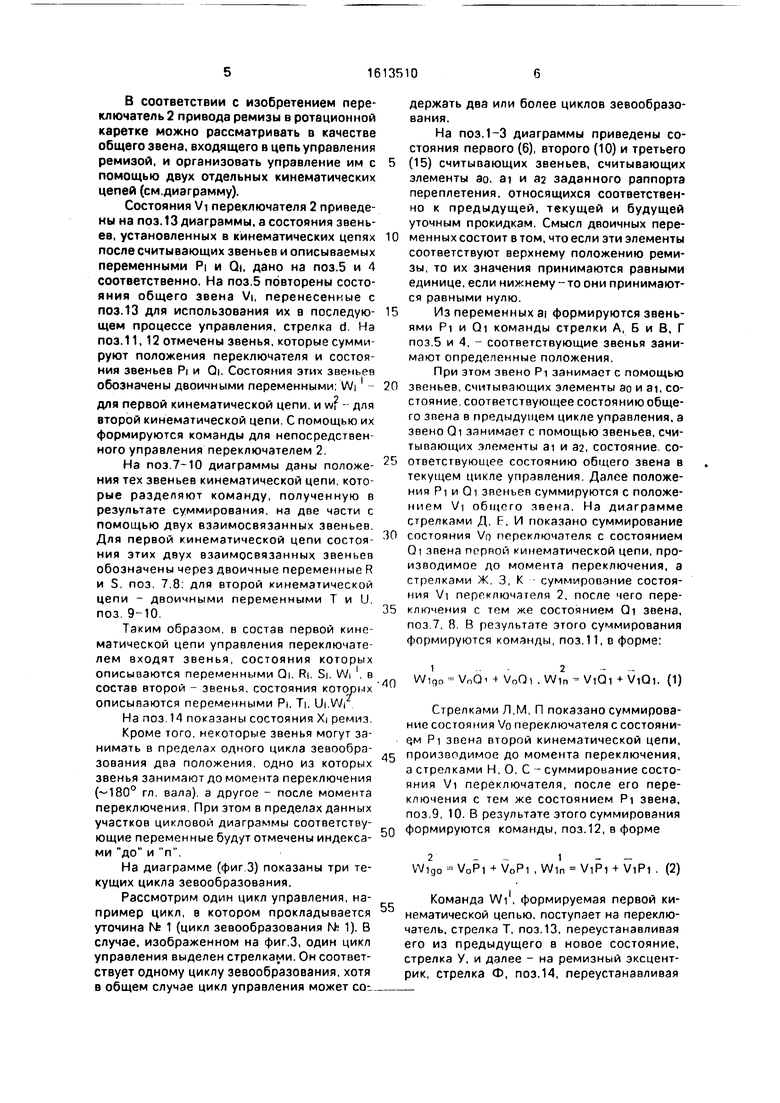
Состояния Vi переключателя 2 приведены на поз. 13 диаграммы, а состояния звеньев, установленных в кинематических цепях после считывающих звеньев и описываемых переменными P| и Qi, дано на поз.5 и 4 соответственно. На поз.5 повторены состояния общего звена Vi, перенесенные с поз. 13 для использования их в последующем процессе управления, стрелка d. Нэ П03.11,12 отмечены звенья, которые суммируют положения переключателя и состояния звеньев Pi и Qi. Состояния этих звеньев обозначены двоичными переменными; Wi для первой кинематической цепи, и w - для второй кинематической цепи. С помощью их формируются команды для непосредственного управления переключателем 2.
На поз.7-10 диаграммы даны положа ния тех звеньев кинематической цепи, которые разделяют команду, полученную в результате суммирования, на две части с помощью двух взаимосвязанных звеньев. Для первой кинематической цепи состояния этих двух взаимосвязанных звеньев обозначены через двоичные переменные R и S, поз. 7,8: для второй кинематической цепи - двоичными переменными Т и U, поз. 9-10.
Таким образом, в состав первой кинематической цепи управления переключателем входят звенья, состояния которых описываются переменными Qi. Ri. Si. Wi , в состав второй - звенья, состояния которых описываются переменными Pi. Ti, Ui.Wi
На поз.14 показаны состояния Xi ремиз.
Кроме того, некоторые звенья могут занимать в пределах одного цикла зевообра- зования два положения, одно из которых звенья занимают до момента переключения (-180° гл. вала), а другое - после момента переключения. При зтом в пределах данных участков цикловой диаграммы соответствующие переменные будут отмечены индексами до и п,
На диаграмме (фиг.З) показаны три текущих цикла зевообразования.
Рассмотрим один цикл управления, например цикл, в котором прокладывается уточина NI 1 (цикл зевообразования Nfc 1). В случае, изображенном на фиг.З, один цикл управления выделен стрелками. Он соответствует одному циклу зевообразования,хотя в общем случае цикл управления может со
10
15
20
25
30
35
держать два или более циклов зевообразования.
На поз. 1-3 диаграммы приведены состояния первого (6), второго (10) и третьего (15) считывающих звеньев, считывающих элементы ао, ai и а2 заданного раппорта переплетения, относящихся соответственно к предыдущей, текущей и будущей уточным прокидкам. Смысл двоичных переменных состоит в том, что если эти элементы соответствуют верхнему положению ремизы, то их значения принимаются равными единице, если нижнему -то они принимаются равными нулю.
Из переменных ai формируются звеньями PI и QI команды стрелки А, Б и В, Г поз.5 и 4, - соответствующие звенья занимают определенные положения.
При этом звено PI занимает с помощью звеньев, считывающих элементы ао и ai, состояние, соответствующее состоянию общего звена в предыдущем цикле управления, а звено QI занимает с помощью звеньев, считывающих элементы ai и а2, состояние, соответствующее состоянию общего звена в текущем цикле управления. Далее положения PI и QI звеньев суммируются с положением Vi обидсго звена. На диаграмме стрелками Д, Е, И показано суммирование состояния VQ переключателя с состоянием Qi звена первой кинематической цепи, производимое до момента переключения, а стрелками Ж, 3, К - суммирование состояния Vi переключателя 2. после чего переключения с тем же состоянием Qi звена, поз.7, В. В результате этого суммирования формируются команды, поз.11, в форме:
40
1-.-2
Wi(,o- VoQ + VoQi , Win
ViQi +ViQi. (1)
Стрелками Л,М, П показано суммирование состояния Vo переключателя с состояни- QM Pi звена второй кинематической цепи, производимое до момента переключения, а стрелками Н. О. С - суммирование состояния Vi переключателя, после его переключения с тем же состоянием PI звена, поз.9, 10. В результате этого суммирования формируются команды, поз.12, в форме
Wigo VoPi - VoPi , Win ViPl + ViPl . (2)
Команда Wi , формируемая первой кинематической цепью, поступает на переключатель, стрелка Т, поз. 13, переустанавливая его из предыдущего в новое состояние, стрелка У, и ддлее - на ремизный эксцентрик, стрелка Ф, поз.14, переустанавливая
его из предыдущего состояния в новое, стрелка Ц.
Процесс управления и контроля организован так, что при правильном зевообразо- вании звенья на одном участке цикловой диаграммы принимают рабочие состояния, необходимые для продолжения процесса зеоообразования, а на другом - только ну- лепые состояния. В данном случае нулевое значение будут иметь команды Win и Wigo . Состояния этих звеньбв на соответствующих участках диаграммы можно принять в качестве контрольных и определять по ним правильность процесса переустановки.
Дeйctвитeлbнo, при суммировании положений звеньев Q и V до переключения для первой кинематической цепи имеем, стрелки Е, Д, И (поз.11)
Wlgo VoQl + VoQl
(aoSi + aoai) ( aiaa + aia2) + , + (aoai + ioai) ( aiaa + aia2)
aoa2 + aoa2 ,
a после переключения, то же самое звено имеет положение (стрелки Ж, 3, И):
(aiaa + aia2 ) (aia2,+ aia2) + + (aia2 + aia2 ) (aia2 + aia2 ) 0 , При суммировании положений звеньев Р и V для второй кинематической цепи до момента переключения имеем, стрелки Л. М, П(поз.12):
Wigo VoPi + VoPjL
(aoai + aoai) (aoii ) + + (aoai + aoai) (aoai + aoai) 0, a после момента переключения то же самое звено будет иметь поло) (стрелки Н, О, С)
Л ViPi + (3132 + aia2) (aoai + Зо ai) + + 3132 + aia2) (aoai + Эо ai) aoa2 + aoa2.
Команда Wigo формиру емая первой кинематической цепью, служит для управления процессом зевообразований при движении каретки вперед. Команда Win , формируемая второй кинематической цепью, служит для управления при движении назад - при этом сначала общее звено приобретает предыдущее состояние, стрелки Ш, Щ, а затем переустанавливается ремиза, стрелки Э, Ю.
Если же при считывании или при переустановке какие-либо звенья кинематической цепи управления ремизой установились н правильно, то на контрольных участках данные звенья принимают состояния, не соответствующие нулевым положениям. Используя отличие положений этих звеньев от
5 нулевых, формируют сигнал для останова станка.
Наиболее просто сформировать сигнал для останова станка можно с помощью звеньев R,S и Т, U, разделяющих команды
10 на две части. При этом межд переменными R, S, Т, у и слагаемыми VoQi, VoQi, ViQi, ViQi, VoPi, VoPi, входящими в формулы (1), (2),должно быть осуществлено равенство, выражающееся до переключения форму15 лами
, Sigo VoQi,
Tigo VoPi, Ulgo VoPi ;
a после переключения - формулами Rln Viai, Sin ViQi,
20Tin ViPi, Uin ViPi .
Суть такого разделения заключается в том, что при неправильной установке каких- либо звеньев кинематической цепи в любом случае одно из звеньев R. S, Т или U устано25 вится на контрольных участках в положение, не соответствующее нулевому. В отличие от этого звенья Wi и Wi (поз.11, 12) не всегда могут проконтролировать правильность переустановки. Действительно,
30 при правильном процессе зевообразований имеем для первой кинематической цепи (поз. 7,8) до переключения
Rigo VoQi (aoai + ioai )(aia2 + aia2)
5 aqaia2 + aoaja2 ,
Sigo VoQi ( aoai + ioai )(aia2 + aia2 j
aoaia2 + aoaia2 , после переклю нения „ Rin ViQi (aia2 + aia2)(5ja2 +aia2 )eO, 0 Sin ViQi (aia2 + aia2)(aia2 + aia2 ) 0. Для второй кинематической цепи имеем (поз.9, 10) до переключения
Tigo VoPi (эоЗ + зо ai) (aoai + aoai ) О, Uigo ViPi (aoii + aoai )(aoai + Soai) 0. после переключения Tin ViPi (aia2 + aia2) (aoii + aoai) aoaia2 + aoaia2 .
0
Uin ViPi (aia2 - aia2) (aoai + aoai) aoaia2 + aoaia2 ,
Таким образом, состояния Rin. Sin и Tigo, Uigo будут ЯВЛЯТЬСЯ ДЛЯ рассматрива- емого процесса управления контролируемыми, а состояния Rigo, Sigo и Tin, Uin 5 рабочими.
При неправильной установке какого-либо звена, например переключателя, при которой вместо состояния Vo aoai+aoai (или состояния Vi aia2+aia2) он будет иметь согласно алгебре логики инверсные состояния, описываемые формулами
Vo ЭоЗ + ЭоЗ ЭоЗ + SoSl , ИЛИ 7l 3132 +ai32
контролируемые звенья будут иметь положения: для первой кинематической цепи
Rin VlQl (3132 + 3132 ) (3ll2 + aia2 1 3132 + 3132,(3)
Sin ViQi ViQi (aia2 + ai32) (3ia2 + aia2 )
3132 + 3132(4)
ДЛЯ ВТОРОЙ кинематической цепи
Tigo (aoai + ioai) (ao3i-baoai)
aoai + aoai,(5)
Uigo VoPi-(aoai+aoai) (aoai + Soai)
аоЗ + (6)
Выражения (3), (4), (5), (6) используют для выделения сигнала ошибки и формирования команды на останов станка. Формирование команды на останов производится по суммарному действию сигналов Rin, Sin или сигналов Tigo, Uigo. на средство формирования сигнала останова и оно всегда будет равно единичному воздействию.
Действительно, для первой кинематической цепи согласно правил алгебры логики
Rin + Sin aia2 3132 + ai32 + aia2 1 для второй кинематической цепи Tigo + Uigo aoai + aoai - aoai - aoa i 1
Из диаграмм легко заметить, что состояния звеньев на поз.9 и 10 после момента переключения ( 180° главного вала)вточно сти повторяют состояния звеньев на поз.7, и 8 до момента переключения. По этой при- чине раз отыскивается за один оборот главного вала каретки назад.
Рассмотренный на диаграмме процесс управления может иметь функцию автоматического выхода на заданную программу при случайном сбое, если вместо операции считывания злемента ai программы подавать на формирование команды управления (поз. 5, 6) информацию о текущем состоянии ремизы Xi ai (стрелка в). В зтом случае сосгояния звеньев Pi и Qi не изменятся и будут соответствовать состояниям общего звена, как указано выше. Сохраняются и все остальные операции управления.
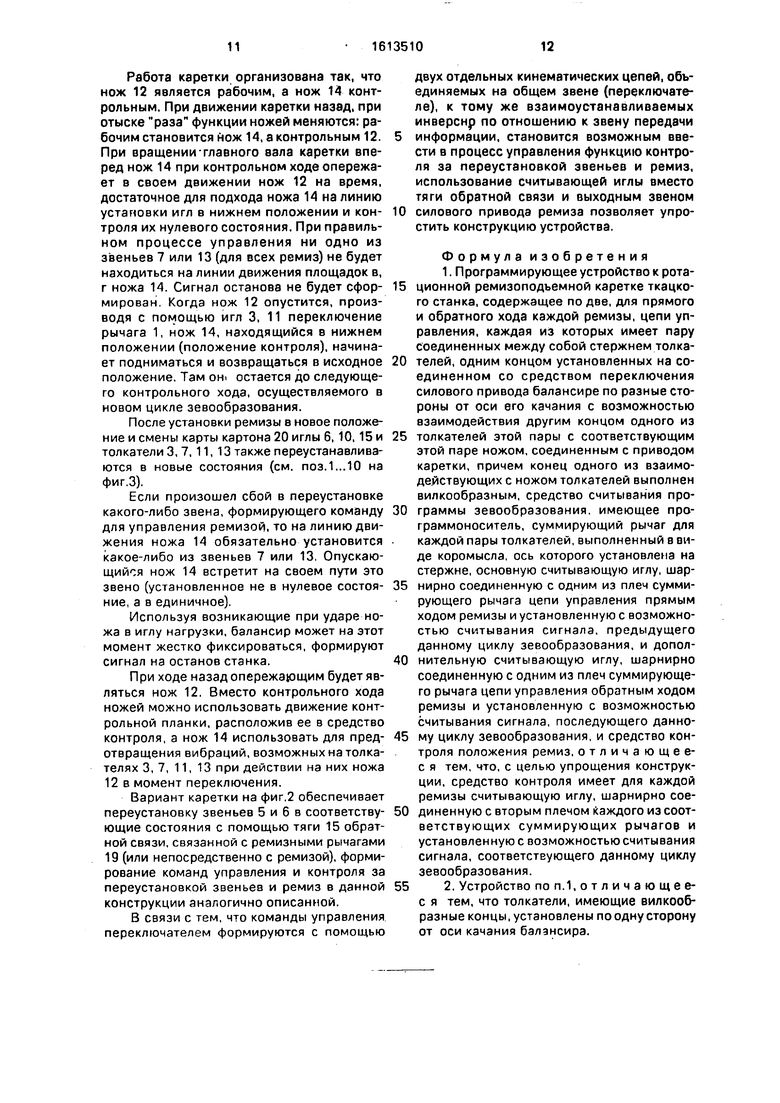
Обозначим состояния звеньев, прини- маемые ими в работе каретки, с помощью следующих двоичных переменных с индексами, обозначающими номер цикла зе- вообразования, к которому относятся переменные: звена 6 - переменной а2. так кзк оно производит считывание в первом цикле зевообразований злемента а2 раппорта переплетения: звена 10 - переменной Зо, так как оно производит считывание элемента Зо аппарата переплетения звена 15 - переменной ai, так как оно производит считывание элемента ai (фиг.1) или связано с ремизой, установленной в состояние Xi ai (фиг.2): звена 1 - переменной Vo, так как оно связано с переключателем 2:звена 5 - переменной Q: звена 9 - переменной Р: звена 3 - переменной R: звена 11 - переменной S; звена 7 - переменной Т; звена 13 - переменной U: звенз 19 - переменной X.
На фиг.2, 3 стрелками отмечено перемещение рассматриваемых звеньев от одного конечного положения к другому, а цифрами О и 1 обозначено, какому положению звенз приписано нулевое значение, а какому - единичное.
Значения переменных определяются нз основе таблиц состояний 1...6.
На основании табл.1 функция Р1 определяется следующим образом:
PI aoai aoai.
На основании табл.2 функция QI определяется выражением
Qi- ai 32 ai .
На основании табл.3 функции Rigo и Rin будут иметь вид
Rigo-VoQi: Rin-ViQi.
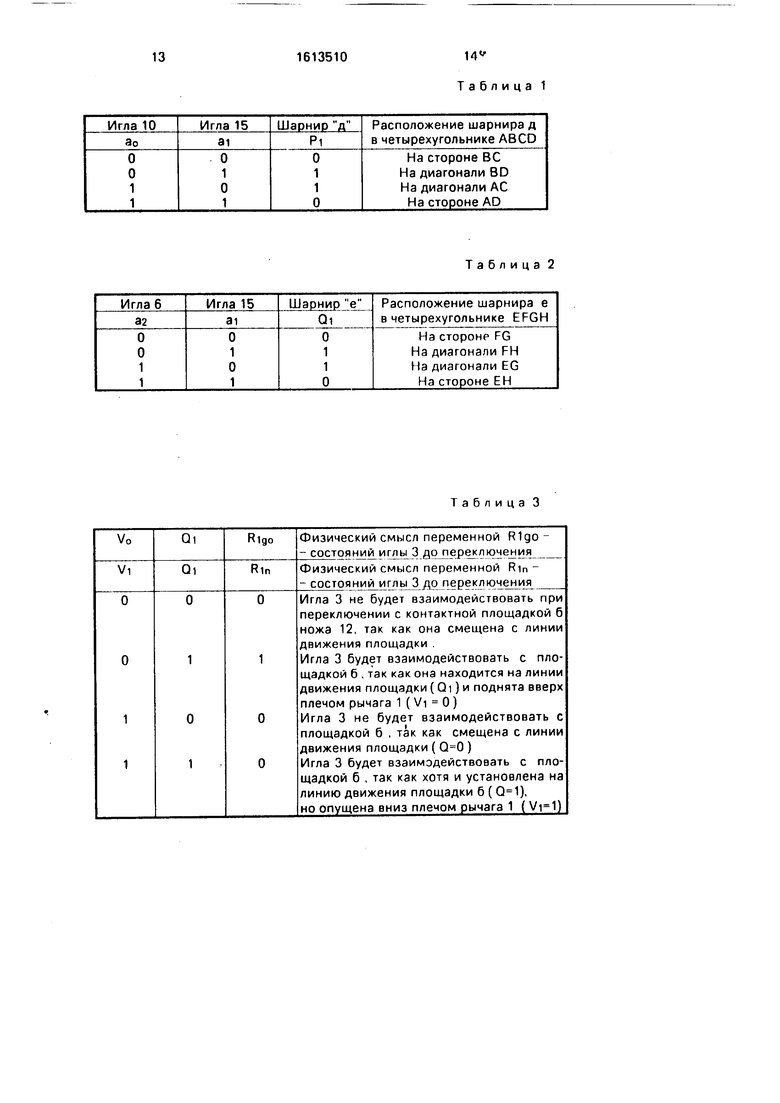
На основянии табл.4 функции Sigo и Sin выразятся
Si,,o--VoQi: Sin-ViQi.
На основании табл.5 функции Tigo и Tin будут иметь пид
Tic,o-VoPi:Tin ViPi.
На основании табл.6 функции Uigo и Uin будут иметь вид
Uigo-VoPi: Vin ViPi.
Тябл.1 ...6 состояний и полученные на их основе логические зависимости показывают, что звенья переустанавливаются в соответствии с формулами, описывающими процесс управления и контроля, а следовательно, данный состав звемьеп и их соединение между собой обесгючинают формирование команд по прсдлагдемому способу.
Анализ показывает, что команды RiS и TiU. передяпясмые взаимосвязанными парами зпеньсв 3. 11 и 7,11 балансиру 1,связаны друг с другом операцией логического сложения, что может быть представлено следующими функциями: для первой кинематической цепи:
WigJ-RiQo - Sir, + Vo Qi, + Sin- -ViQi -b ViQi, для второй кинематической цепи
Wlqo Tlqo +Ulno VoPl + VoPi,
+ Uin ViPi + Vi PI.
Данные формулы соответствуют функциям (1), (2),
Работа каретки организована так, что нож 12 является рабочим, а нож 14 контрольным. При движении каретки назад, при отыске раза функции ножей меняются: рабочим становится нож 14, а контрольным 12. При вращении-главного вала каретки вперед нож 14 при контрольном ходе опережает в своем движении нож 12 на время, достаточное для подхода ножа 14 на линию установки игл в нижнем положении и контроля их нулевого состояния. При правильном процессе управления ни одно из звеньев 7 или 13 (для всех ремиз) не будет находиться на линии движения площадок в, г ножа 14. Сигнал останова не будет сформирован. Когда нож 12 опустится, производя с помощью игл 3, 11 переключение рычага 1, нож 14, находящийся в нижнем положении (положение контроля), начинает подниматься и возвращаться в исходное положение. Там oHi остается до следующего контрольного хода, осуществляемого в новом цикле зевообразования.
После установки ремизы в новое положение и смены карты картона 20 иглы 6, 10,15 и толкатели 3, 7,11,13 также переустанавливаются в новые состояния (см. поз.1...10 на фиг.З).
Если произошел сбой в переустановке какого-либо звена, формирующего команду для управления ремизой, то на линию движения ножа 14 обязательно установится какое-либо из звеньев 7 или 13. Опускающийся нож 14 встретит на своем пути это звено (установленное не в нулевое состояние, а в единичное).
Используя возникающие при ударе ножа в иглу нагрузки, балансир может на этот момент жестко фиксироваться, формируют сигнал на останов станка.
При ходе назад опережающим будет являться нож 12. Вместо контрольного хода ножей можно использовать движение контрольной планки, расположив ее в средство контроля, а нож 14 использовать для предотвращения вибраций, возможных на толкателях 3, 7, 11, 13 при действии на них ножа 12 в момент переключения.
Вариант каретки на фиг.2 обеспечивает переустановку звеньев 5 и 6 в соответствующие состояния с помощью тяги 15 обратной связи, связанной с ремизными рычагами 19 (или непосредственно с ремизой), формирование команд управления и контроля за переустановкой звеньев и ремиз в данной конструкции аналогично описанной.
В связи с тем, что команды управления переключателем формируются с помощью
двух отдельных кинематических цепей, объединяемых на общем звене (переключателе), к тому же взаимоустанавливаемых инверснр по отношению к звену передачи
информации, становится возможным ввести в процесс управления функцию контроля за переустановкой звеньев и ремиз, использование считывающей иглы вместо тяги обратной связи и выходным звеном
силового привода ремиза позволяет упростить конструкцию устройства.
Формула изобретения
1. Программирующее устройство к ротационной ремизоподъемной каретке ткацкого станка, содержащее по две, для прямого и обратного хода каждой ремизы, цепи управления, каждая из которых имеет пару соединенных между собой стержнем толкателей, одним концом установленных на соединенном со средством переключения силового привода балансире по разные стороны от оси его качания с возможностью взаимодействия другим концом одного из
толкателей зтой пары с соответствующим зтой паре ножом, соединенным с приводом каретки, причем конец одного из взаимодействующих с ножом толкателей выполнен вилкообразным, средство считывания программы зевообразования. имеющее программоноситель, суммирующий рычаг для каждой пары толкателей, выполненный в виде коромысла, ось которого установлена на стержне, основную считывающую иглу, шарнирно соединенную с одним из плеч суммирующего рычага цепи управления прямым ходом ремизы и установленную с возможностью считывания сигнала, предыдущего данному циклу зевообразования, и дополнительную считывающую иглу, шарнирно соединенную с одним из плеч суммирующего рычага цепи управления обратным ходом ремизы и установленную с возможностью считывания сигнала, последующего данному циклу зевообразования, и средство контроля положения ремиз, отличающее- с я тем. что, с целью упрощения конструкции, средство контроля имеет для каждой ремизы считывающую иглу, шарнирно соединенную с вторым плечом каждого из соответствующих суммирующих рычагов и установленную с возможностью считывания сигнала, соответствующего данному циклу зевообразования.
2. Устройство поп.1,отличающее- с я тем, что толкатели, имеющие вилкообразные концы, установлены по одну сторону от оси качания балансира.
13
1613510
Таблица 1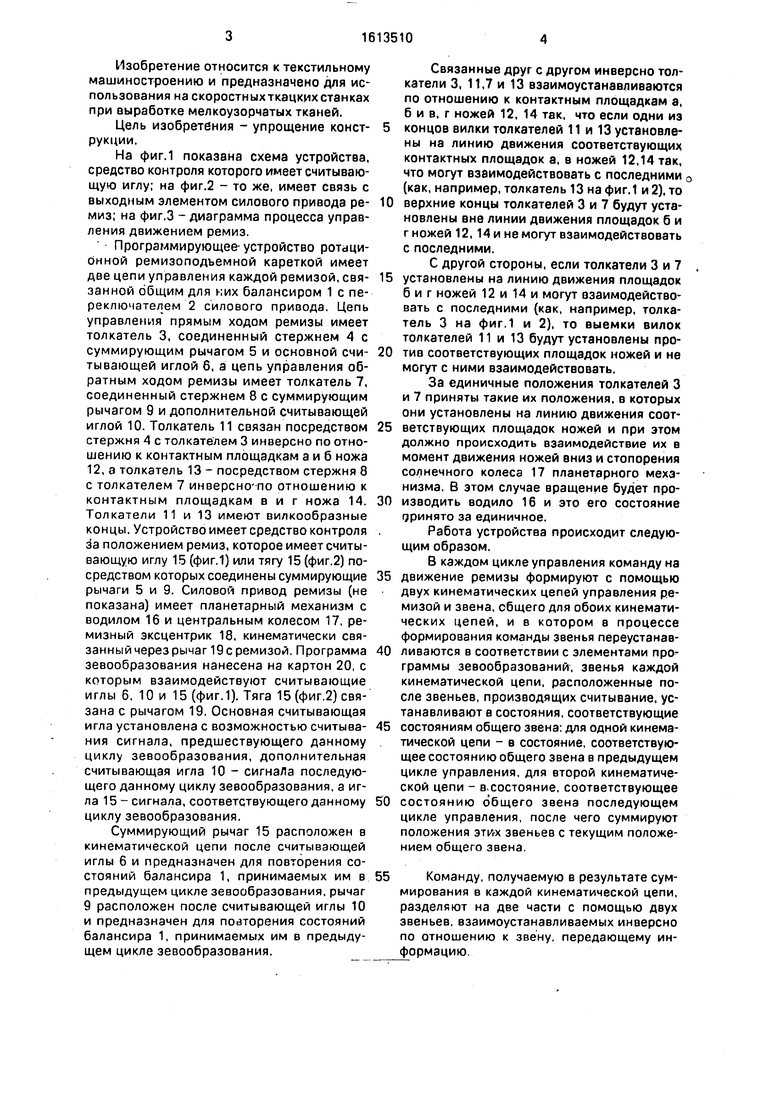
| название | год | авторы | номер документа |
|---|---|---|---|
| Программирующее устройство к ротационной ремизоподъемной каретке ткацкого станка | 1986 |
|
SU1613511A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1976 |
|
SU609796A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1979 |
|
SU1087580A2 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА К ТКАЦКОМУ СТАНКУ | 1995 |
|
RU2090675C1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1984 |
|
SU1189907A1 |
| Ротационная ремизоподъемная каретка к ткацкому станку | 1988 |
|
SU1548289A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1988 |
|
SU1527338A1 |
| Ротационная ремизоподъемная каретка к ткацкому станку | 1990 |
|
SU1721136A1 |
| Ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1285083A1 |
| АВТОМАТИЧЕСКИЙ КРУГЛЫЙ ТКАЦКИЙ СТАНОК | 1938 |
|
SU65254A1 |
Изобретение относится к текстильному машиностроению и позволяет упростить конструкцию программирующего устройства ротационной каретки ткацкого станка. Устройство имеет две цепи управления движением ремиз как прямого, так и обратного хода и средство контроля за фактическим положением ремиз. Основная считывающая игла 6 установлена с возможностью считывания сигнала, предыдущего данному циклу зевообразования, дополнительная считывающая игла 10 - сигнала, последующего данному циклу зевообразования, а игла 15 - сигнала, соответствующего данному циклу зевообразования, контролируя фактическое положение ремизы. При розыске "раза" сбоя рисунка не происходит, так как игла 10 будет считывать сигнал не последующего, а предыдущего данному циклу зевообразования. 1 з.п. ф-лы, 3 ил.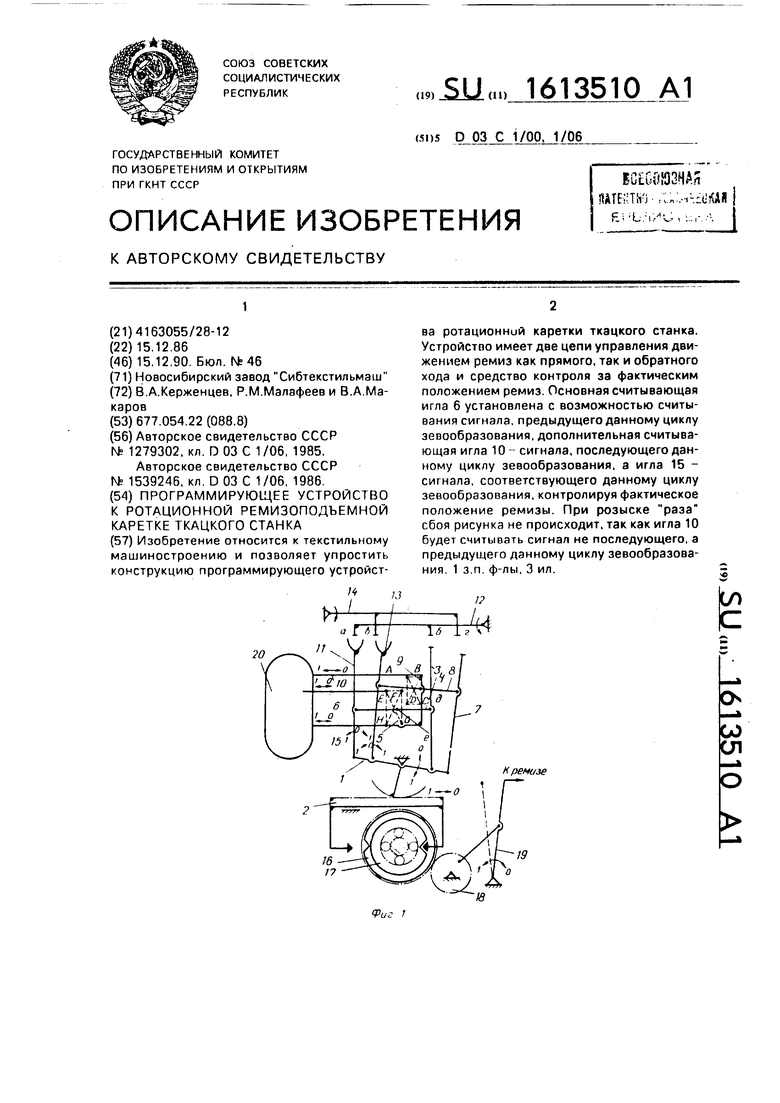
Таблица 2
Таблица 3
Таблица 4
Т а б л и ц а 5
Та б л и ц а 6
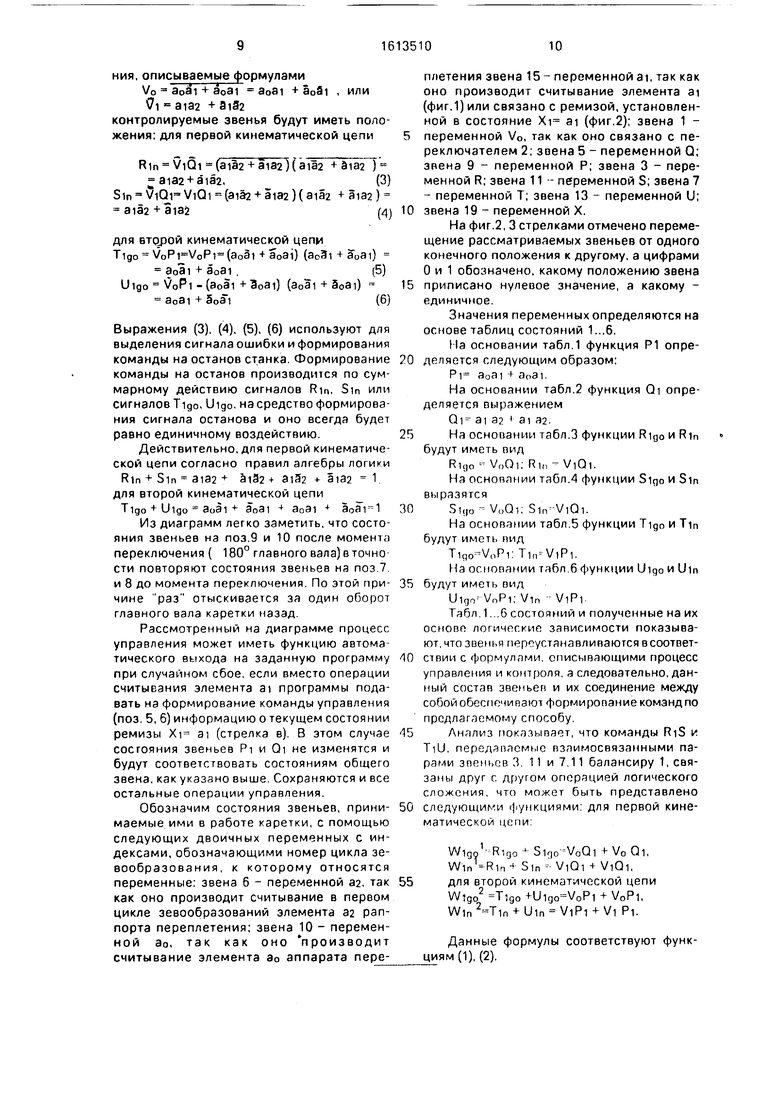
трвмивв
Циклы эеВро5- разоВаний
Углы поборота
пеЩШ1
ере
«7
О
W
Состояния пер- дого считыВаю- щего збена
а,,
Состояния второ ZO сч лпь/бающе- 2о
а.
Состояния треть его с итыВанз- щего збена
о,
Состояния з8eнqB1 кинрмтицескай це- ли(после звена с W/T/A
Состояния зBefiaBoZ
,,7 Н Ll
F
a5,U((
7 / W I - II-
8
достояния Ьглорогои бзаи ос&язонны) ЬеньеЬ цепи
jfeweS 1ой цепи
10
осто ния6торого из дбух бзаимосмзаниы беньев 2-ой цели
11
CocmoflHUft збеиа 1-ои цепи, упрадляшщег оВщим зВенам
12
CocmofiHUfi збена г-с цепи,упраВляк1Ш,вг( gdu4UM звеном
/J
Состояния o6u4ezo збена
, M
., ..
Составитель Н. Фуражкин Редактор О. СпесивыхТехред М.МоргеиталКорректор Э. Лончакаиа
0°
т
О т
sm о
и
©
7Л
f
1J и
2
lJ---T r An.
QZ
, г J n Pi-a. L
Фиг.
| Авторское свидетельство СССР N 1279302.кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Авторское свидетельство СССР № 1539246 | |||
| кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
