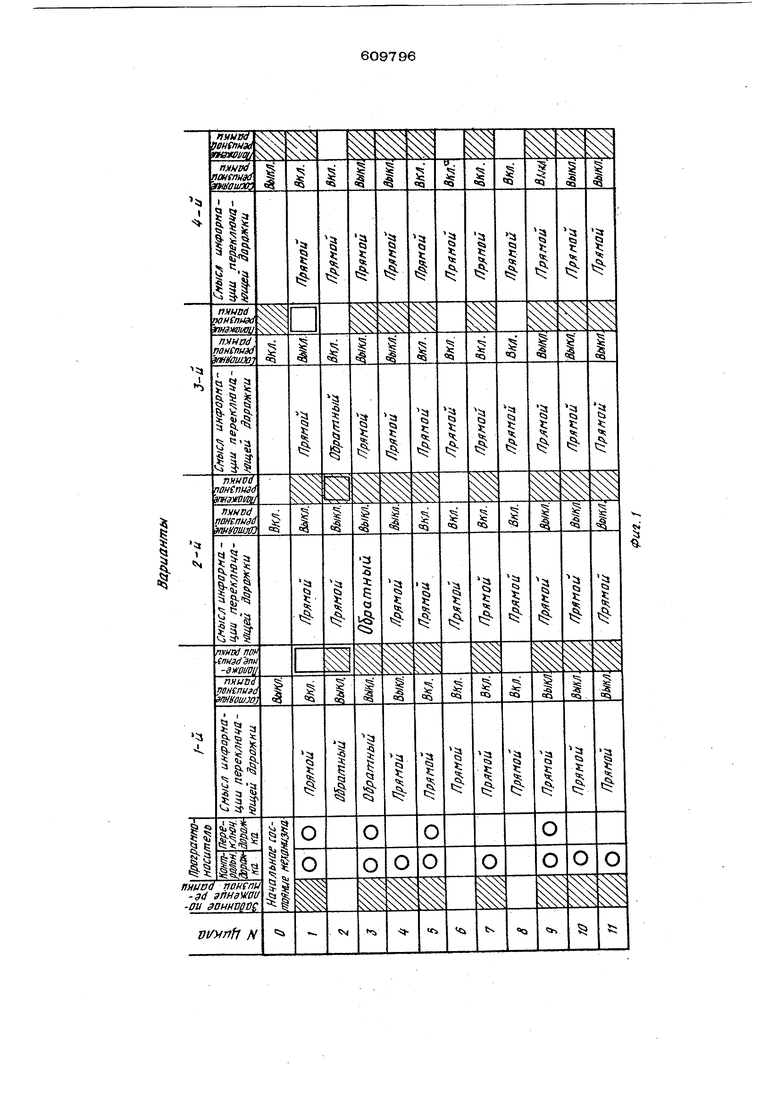
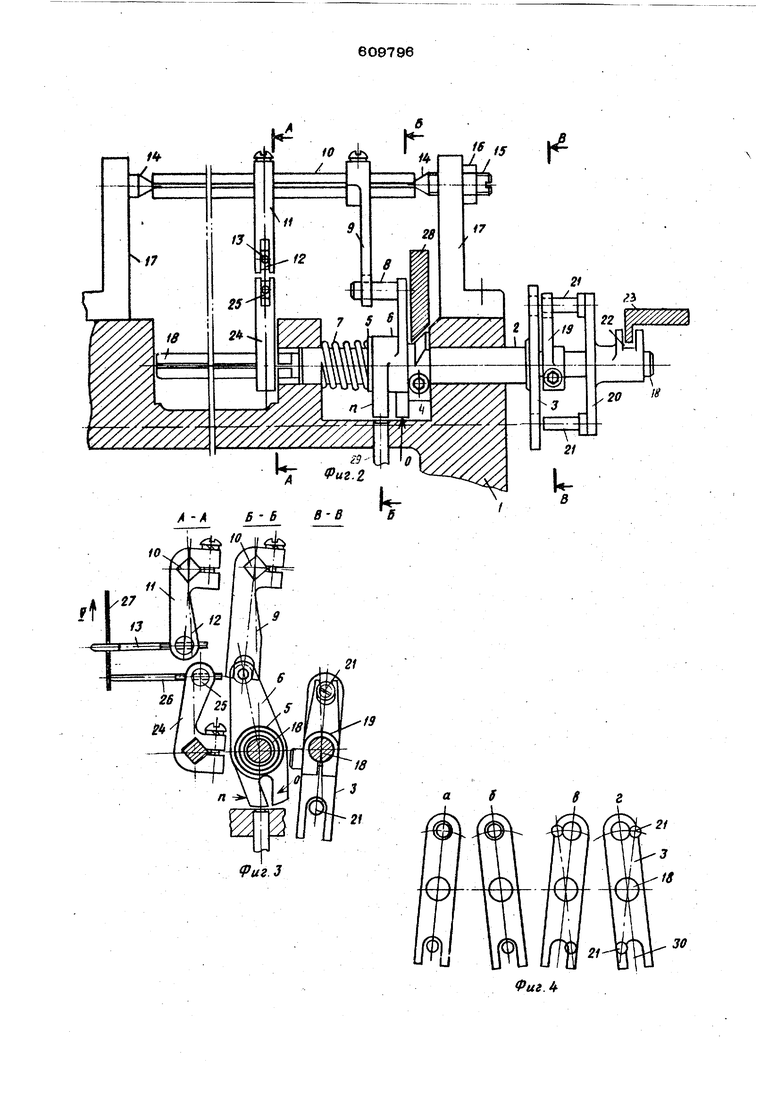
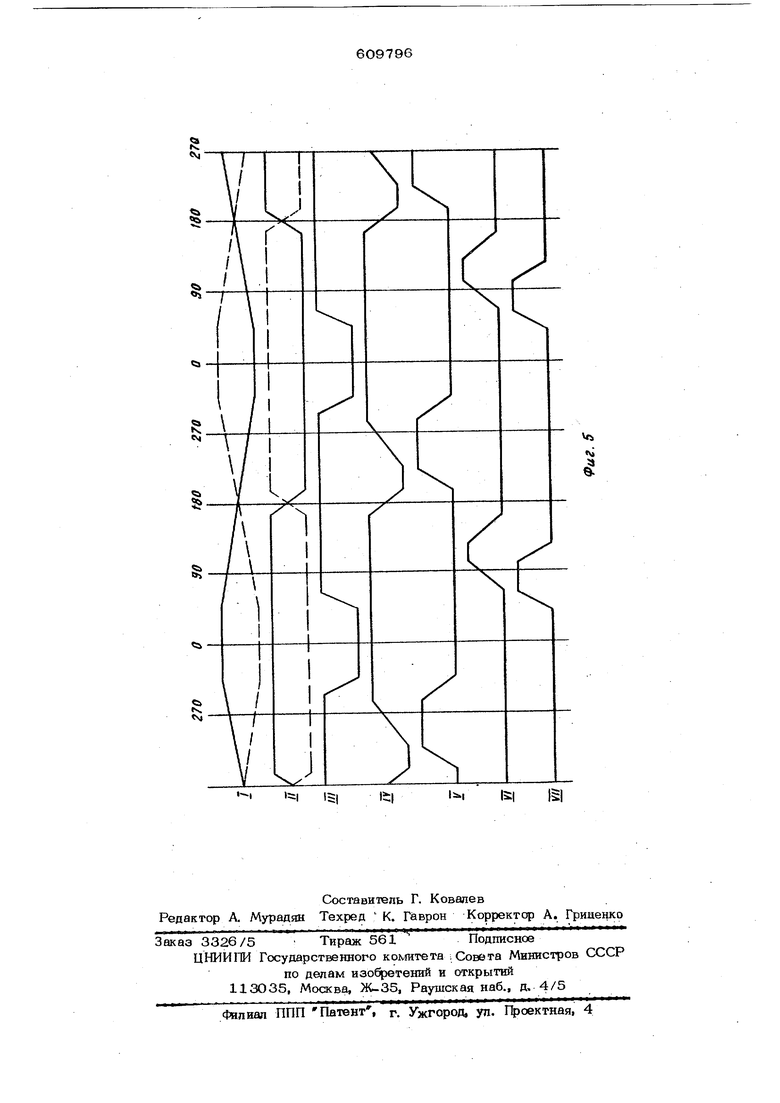
С указанной цепью в Еэвестном механизме управления ремизоподъемной карэжой ткацкого станка, содержащем средство изменения положения ремизной рамки, имеющее шток, кинематическв с язанный с ремиз ной рамкой R уставовпенный с возможностью контактирования с упором свободно смонтиров анного на валу переключателя, киюматячесаки связанногр со считывающей ига ей, взаимодействующей с программоносителем, имеется дополнительная считывающая йгпа, взаимодействующая с 15 ограммоноситепем, средство сраннениа действительного положения ремизной раккн с заданным, состоящее из двух установленных соосэдо переключателю пластин, одна иэ которых выполнена пбд пружиненчой, кивематвчески связана с ремиз ной рамкой и переключатепем, а другая кинематически связана с дополнительной счи тывающей иглой и главным валом станка и фиксатор пластины кинематически связанной с переключателем, Щ1и;этом одна из плас. тин имее т выступ, а другая - паз для прохода выступа, а переключатель имеет вгоррй упер для контактирования сО штсжом. На фиг. 1 приведена таблица, отображающая взаимодействие элелюнтов лдаханизма управления при настройке на рисунок} на фиг. 2 - схема механизма управления на фиг. 3 - разрезы А-А, В-Б и В-В фиг. 2{ на фиг. 4 - взаимные положения пластин средства сравнения действительного попоже ВИЯ ремизной рамки с ааданнымуна фиг. 5 цикловая диаграмма работы механизма управления и исполнительного механизма. Таблица построена следующим офазомг в графе Заданное поломданяе рекшаной рамки приведены ее пополдания в каждом цикле: заштрихованный квадрат соответствует верхнему положению ремизной рамки, незащтрихованный - нижнему подожению в графе Положение ремизной не. правильные положения ее отмечены двойны-. ми ЛИНИЯМИ} в графе Программоноситель приведены карты, которые последовательно ощупь вают-. ся считывающими иглами| каждая карта сос тоит иа(вух дорожек, в таблице, обозначен за,: обратная связь и пэреключениеЛЪр вая дорожка - кон1рольная, на которой отверстие соответствует верхнему потсакению ремизной рамки в данном дикле, атсутствие отверстия - нижнему втекая дорожка - переключающая, нанесенная на ней информация молдат меняться по следующему правилу. При соответствии действительного положения ремизной рамки контрольной дорожке программоносителя отверстие на переключающей дорожке соответствует переключению, .атсу -стэие - ow scfsssso sjepesw-w-чешя. несоотвегствии в данном пикпе действительного положения ремизной рамки KOHIVропьной дорожке программоносителя смысл информации пв реключающей дорожки в поспедующем цикле меняется на обратный, т.е. наличие отверстия соответствует отоутствшо пер слючения, отсутствие отверстия - наличию переключения. В таблице приведены четьфе графы соответственно для возможных четырех начальных соспюяний исполнительного кеханизма, Korqpbie могут иметь место до начала считывания, из первые три не обеспечивают правильного режима работы ремизной рамки в последующих циклах без ручной или автом таческой настройки, и только четвертое начальное состояние исполнительного ме хааизма может обеспечить правильный режим без дополнительных дейсягВИЙ механизма упчавпешя. ГГроцесс вастройки на рисунок на примере первого начального состояния исполнительного механизма состоит в следующем. , Начальное состояние механизма: 1)ремизная рамка выключена; 2)положение ремиздой рамки нижнее. Указанное состояние исполнительного ме.. ханизма имеет место до считывания первой карты. К началу первого цикла состояние исполнительного механизма изменится, так кшс. после считывания пэрвой карты отверстгие в переключающей дqpoжкe имеет прямой смысл т.е. произойдет шрекпючение, в результате которого состояние исполнительного механизма будет: 1)ремизная рамка включена; 2)положение рамки ншкваа. сравнении действительного положений ремизной рамки с заданным в первом цикле ввднр, что имеет место несоответствие: ремизная рамка внизу, а отверстие на контроль-, ной дфожке означает, что ремизная рамка должна быть вверху. Следовательно, согласно приведенному вьпве правилу, смысл инфс мации на переключающей дорожке в последующем (во втором) цикле должен быть изменен на обратный, т.е. при отсутсчвиЕ отверстия должно имечъ место шрекпючение. Таким образом, в начале второго цикла состояние исполнительного механизма будет; 1)рем11аная рамка выключена} 2)положение ремизной рамки верхнее. При сравнении действительного положения вЪ втором цикле с заданным видно также несоответствие, следовательно, смысп нформации переключающей дорожки програмоносителя в третьем цикле должен быть сменен на обратный, т.е. при наличии отвар тия ье должно быть переключения, тогда в начале третьего, цикла состояние исполнител ного механизма не иаме1В1тся: 1)ремизная рамка выключена; 2)положеше ремизной рамки верхнее. 1Три этом действительное положение ремизной рамки в третьем цикле соответствует заданному,, следовательно, смысл информации переключающей дорожки в последующем (четвертом) цикле должен быть пряК1ым, т.е. отсутствие отверстия должно соответствовать отсутствию переключения. Таким образом, сравнивая реальный режим работы ремизной рамки в период настр ки с заданным, устанавливаем, что неправильное положение ремизки имело место в .первом и втором циклах. На фиг. 2-4 изображен пример конструктивного решения механизма управления, обе печивающего приведенные выше действия. В расточке корпуса 1 свободно с возмож ностью осевого перемещения распЬпожена ; втулка 2. Для ограничения осевого перемещения BiynKH 2 служит пластина 3 средства сравнения, жестко соединенная с ней, и упор 4. С вт)Т1кой 2 жесгао соединена втул ка 5, на которой свободно установлены переключатель 6 и пружина 7 сжатия. Переключатель 6 посредством пальца 8, водипки 9, валика-ква/фата 10, рычага 11, оси 12 и считывающей игпы 1 3 связан с программоносителем. Валик-квадрат 10 свободно установлен в центрах 14, один из которых имеет возмож ность регулировки посредством винта 15 и контргайки 16. Центры 14 установлены в стойках 17, закрепленных на корпусе 1. Во втулке 2 свободно установлен валик 18, на круглой части которого неподвижно укреплена водилка 19 и с возможностью осе вого перемещения установлена пластина 2О средства сравнения, один из пальцев 21 кот рой входит в паз водилки 19. Посредством паза 22, угольника 23 и кулачковой пары (на чертеже не псжазана) пластина 20 киш матически связана с главным валом зевообразующего механизма (на чертежах не псаса зан). На квадратной части валика IS посредством клеммы укреплен рычаг 24, который через ось 25 и дополнительную считывающу иглу 26 связан с программоносителем 27. Фиксатор 28 пластины 3 через кулачковую пару связан с главным, вал ом исполнительно го механизма. Переключатель 6 имеет два упора: упор, выполняющий прямую команду на гереключен обозначен П, а упор, выполняющий обратную команду на переключение - О. Оба упора П и О установлены с возможностью контактирования со штоком 29, который имеет возможность воздействовать на исполнительный механизм: есяи на пути движения щтсжа установлен какой-либо упор переключателя, то происходит изменение состояния исполнительного механизма, а если упоры отведены, с пути движения щтока 29, то изменения состояния исполнительного механизма не происходит, Шасийна 3 посредством паза 30 и кинематической цепи (на чертежах не показана) связана с ремизной рамкой (на чертежах не показана). Кривая 1 (фиг. 5) относится к продессу зевообразования, т.е. к подъему и опусканию ремизной рамки. Кривая относится к процессу пеоедачи сигнала о действительном положении ремизной рамки (т.е. начальное движение пластины 3 средства сравнения действительного положения ремизной рамки с заданным). Кривая 111 обозначает движение штока 29, т.е. характеризует процесс переключения исполнительного механизма. Кривая IV - процесс считывания информации с программоносителя, т.е. движение игл 13 и 26 и кинематически связанных с ними элементов механизма управления. Кривая V - процесс протягивания карт программоносителя. Кривая VI - процесс сравнения сигнала о действительном положении ремизной рамки, полученного через обратную связь, с сигналом о заданном положении ремизной рамки - от карты программоносителя, т.е. движение угольника 23. Кривая VTt - процесс запоминания результатов сравнения, т.е. движение фиксатора 28. Механизм работает следующим образом. В каждом цикле работы каретки программоноситель 27 перемещается на одну каргу (на два ряда отверстий) в направлении стрелки У, затем взаимодействует со считывающими иглами 13 и 26, перемещая их в направлении отверстия или оставляя их в исходном положениипри наличии отверстия соответствующих дорожек карты программоносителя, в результате этого игла 1 3, кинематически связа1шая с переключателем 6, устанавливает последние относительно штока 29 в попр {жние| обусловленное заданной программой. Согласно этому положению переключателя 6 в последующий период цикла происходит переключение, т.е. соответствующее измене1ше состоя мя ремизной рамки. Дополнительная Считывающая игла 26, кинематически связанная с пластиной 20 средства сравнения, устанавливает последнее в
положение также сдответственно аадавной программе ощюявпяющее заданное положение ремизной рамкв в данном свкпе работы кареткн.
Шастива 2О средства сравнения, кинема твческв связанная с ремизкой, к началу процесса сравнения (фиг. 5, кривая У1} займет положение, соответствующее реальному положению ремизной рамки.
В тех когда действительное положение рекшэной рамки соответствует заданному, к началу тфоцесса сравнения (фиг, З кравая У1) пластины 3 и 2О средства сравнения будут взаимно расположены так, как показано на фиг. 4 а, 6, т.е. пальцы -21 находятся напротав пазов 30 пластины 3. В этих случаях пластина 2О, двигаясь по направлению к корпусу 1 (фиг. 5, кривая yi)t ш переметает в осевом направлении втулку 2 (так как пальцы 21 свободно входят в пазы ЗО пластины 3} и связанный с ней переключатель 6, тогда со, штоком 29 взаимодействует упор TL Так работает механизм в установввшемся режиме..
В тех случаях, когда действительное положение ремизной рамки в каком-либо цикле, не соответствует заданному, к началу процесса сравнения (фиг. 5, кривая У1) плао-. тины 3 и 2О с дства сравнения Дут взаимно расположены так, как псжазано на фиг. 4 в, г, т.е. папьцы 21 не совпадают с пазами ЗО. В этих случаях пластина 2О, двигаясь по на1Ц авленшо к 1, буаег перемещать в осевом направлении втулку 2 с переключателем 6, сжимая пружнНу 7 н ввода упор О в зону действия штока 29.
Упоры П и О выполнены относительно оси вращения переключателя 6 так, что при нали-. чии отверстия на шреключаюп1ей дерюжке программоносителя 27 упор П устанавливается на линии действия штока 29, а упор О в этом спучве отведен с линии действия штока 29, лри отсутствии отверстия на переключающей дорожке программонвхжтеля 27 положение упфов относительно штока 29 будет обратное.
Ввод в зону действия штсжа 29 упора О инверсирует (меняет на обратный)
на переключение, полученный от перекгоочак щей дорожки программсаюсвт Ья 27.
После завершения осевого перемешенвя втулки 2 упор 4 образует со стенкой корпуса 1 зазор, в который вводится фвксатор 26 при своем движении вниз и, таким о о30N% система втулка 2 - переключатель 6 упс 4 - втулка 5 - 7 удерживает ся в инверсном полсж пга в памяти до того момента (см, фиг. 5), когда будет отработан инверсный сипаал на переключение. После чего фиксатор 28 поднимается, пружина Z возвращает данную систему в исходное (нормальное) положение и начинается следующей процесс сравнения.
б р е т е н и
Формула
изо
Механизм управления ремизоподъемной каретки ткацкого станка, содержащий средство измешшя положения ремизной рамки, имеющее штсж, кюжматически связанный с ремизнс рамкой и устаноаленный с возможностью контактирования с упором свободно смонтированного на валу переключателя, кинематически связанного со считывающей иглой, взаимодействующей с программоносителем, отл ичающийся тем, что, с целью повышения точности управления ремизной рамкой, он имеет дополнительную считывающую иглу, взаимодействующую с програл моносителем, средство сравнения действитеяьного попожешгя ремизной рамки с заданным состоящее из двух установленных соосно пэреключателю пластин, одна из которых выпов нена подпружиненной, кинематически связана с ремизной рамкой и с переключателем, а другая - кинематически связана с дополнитес ной считывающей иглой и главным валом станка, и фиксатор пластины, кинематически связанной с обреключателем, при этом одиа нз пластин имеет выс1уп, а другая - паз для прохода выступа, а переключатель име ет второй упор для контактнроваиия со щтоу ком,.
Источники, информации, принятые во внимание при экспертизе:
1. Патент Швейцарии № 550267, кл. 3) ОЗ С 5/О4, 1974. «.
ФигЛ |4
g N
b
s
r
ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм управления ремизоподъемной каретки ткацкого станка | 1979 |
|
SU1087580A2 |
| Автоматический ткацкий станок | 1988 |
|
SU1606545A1 |
| Программирующее устройство к ротационной ремизоподъемной каретке ткацкого станка | 1986 |
|
SU1613510A1 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1984 |
|
SU1189907A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1988 |
|
SU1527338A1 |
| Устройство для программного управления процессом крашения материала | 1980 |
|
SU943645A1 |
| Система программного управления станком | 1978 |
|
SU867531A1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
u
rTi
I
X
Vft
«si
X
c J
1
s
