Изобретение относится к машиностроению, а именно к промышленным роботам, используемым преимушественно для нанесения лакокрасочных и защитных покрытий. Известен промышленный робот, содержаш.ий основание, предплечье с инструмен-том и плечо, выполненное в виде параллелограммного механизма, привод и уравновешивающие механизмы пружинного типа 1. Недостатком этого устройства является высокая энергоемкость привода, так как масса предплечья высока из-за размещения на нем уравновешивающего механизма. Цель изобретения - улучшение динамических характеристик. Цель достигается тем, что в промышлен „ , ном роботе, содержащем основание, предплечье с инструментом и плечо, выполненное в виде параллелограммного механизма, приводы и уравновешивающие механизмы пружинного типа, предплечье выполнено в виде двуплечьего рычага, одно плечо которого посредством дополнительно введенной гибкой тяги соединено с одним из концов пружины уравновешивающего механизма предплечья, а другой конец пружины закреплен на основании. На чертеже изображена кинематическая схема промышленного робота. Промышленный робот содержит вращающееся вокруг вертикальной оси основание 1, снабженное шарнирно сочлененным с ним параллелограммным механизмом V пит iiapaiijiCtiut pctmivinDini mcAdnnoiviuivi, образованным шатуном 2, кривошипом 3 и плечом 4, шарнирно сочлененным с приводным гидроцилиндром 5, уравновешивающей пружиной 6 и предплечьем 7, выполненным в виде двуплечьего рычага, одно (большое) плечо которого, снабженное инструментом 8, шарнирно сочленено с приводным гидроцилиндром 9, а другое (малое) плечо гибким звеном 10, огибающим цилиндрический ролик 11, соединено с уравновешивающей пружиной 12, вторым концом шарнирно соединенной с основанием 1. Устройство работает следующим образом. При вертикальном положении плеча 4, уравновешивающаяся пружина 6, шарнирно соединеная с основанием 1, нагружена только усилием предварительного натяжения. Нагрузка уравновешивающей пружины 12 определяется положением малого плеча предплечья 7. Уравновешивание плеча 4 осуществляется пружиной 6, один конец которой шарнирно соединен с основанием 1 на вертикалькой относительно основания 1 геометрической оси, проходящей через опору плеча 4, а другой соединен с плечом 4. При отклонении плеча 4 от вертикального положения гидроцилиндром 5 возникает момент, уравновешивающий нагрузку на плечо 4, определяемый произведением усилия натянутой пружины 6 на плечо действия силы. Уравновещивание предплечья 7 осуществляется следующим образом. Предварительно натянутая пружина 12 соединена с гибким звеном 10, огибающим цилиндрический ролик 11, шарнирно связанным с концом малого плеча предплечья 7 в точке В. При этом линия действия уравновешивающей силы совпадает с участком Д(л гибкого звена, который изменяет свою величину и поворачивается при качании предплечья 7. На чертеже пунктирной линиеи показаны дв.а положения предплечья 7. Поскольку пружина 12 имеет жесткую характеристику, меняя предварительное Adi tciiM c nv-1 rit, мсплп ii jcADap i c ionuc натяжение пружины, можно уравновешивать предплечье 7, максимальное значение статического момента которого может меняться в 1,5 раза, что соответствует диапазону весовых характеристик распылителей (1 - 10 кг). Таким образом, предлагаемое устройство отличается от известных лучшими весовыми характеристиками при достаточной мобильности звеньев, обеспечивающих возможность замены инструмента 8, обеспечивая снижение энергоемкости привода. улучшают и динамические характеристики устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU929430A1 |
| Манипулятор | 1983 |
|
SU1106652A1 |
| Промышленный робот | 1987 |
|
SU1407792A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1984 |
|
RU1304292C |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ ДЛЯ ПЕРЕМЕЩЕНИЯ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОГО ПРЕССА НА ДРУГОЙ НА ЛИНИИ ПРЕССОВАНИЯ | 1994 |
|
RU2091207C1 |
| Манипулятор | 1983 |
|
SU1183360A1 |
| Способ и устройство формирования заданной формы квазинулевой статической характеристики виброзащитного механизма сиденья оператора | 2022 |
|
RU2779919C1 |
| Промышленный робот | 1979 |
|
SU848349A1 |
ПРО/ЦЫШЛЕННЫЙ РОБО1, содержащий оспование, предплечье с ппст -э / ///////////////////)(///////////// рументом п плечо, выполпенпое в виде иараллелограммного мехаппзма, приводы п уравновешивающие механизмы пружинного тппа, отличающийся тем, что, с целью улучшения динамическп.х характернстпк, предплечье выполнено в виде двунлечего рычага, одно нлечо которого иосредством донолпительно введенной гибкой тяги соединено с одним из концов нружпны уравновешивающего механизма предцлечья, а другой конец пружпны закреплен на основании. (Л BI го о со о О 4 О гг 1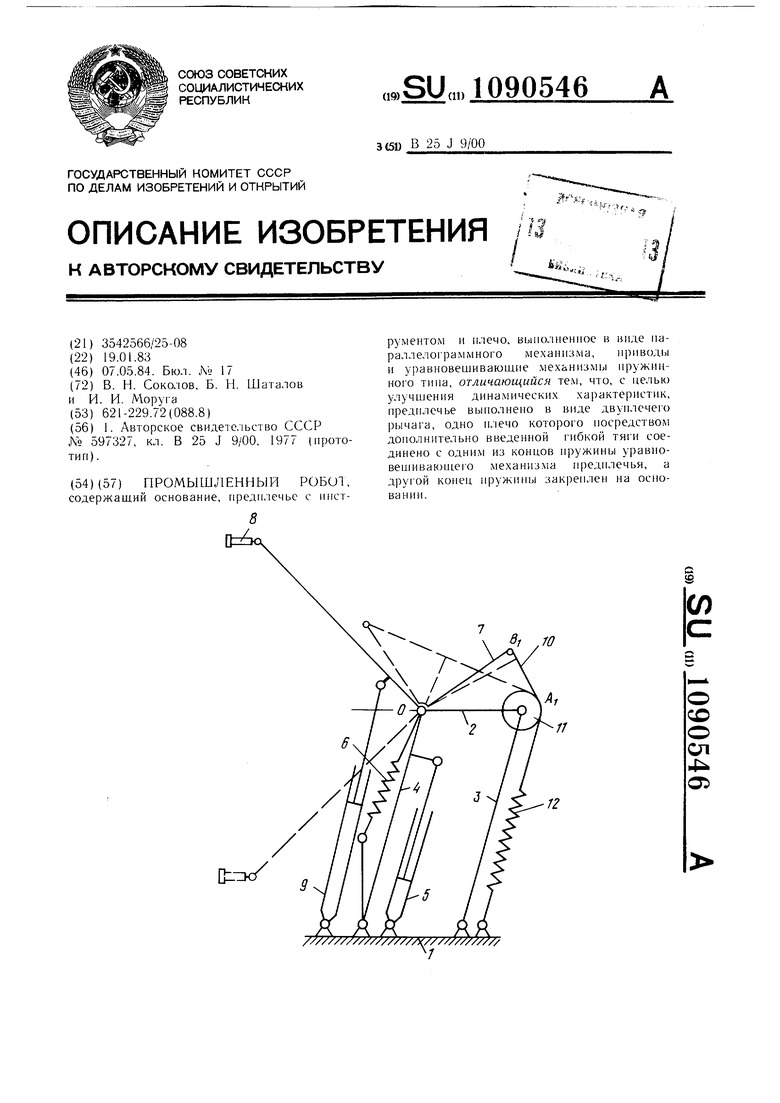
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1975 |
|
SU597327A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
