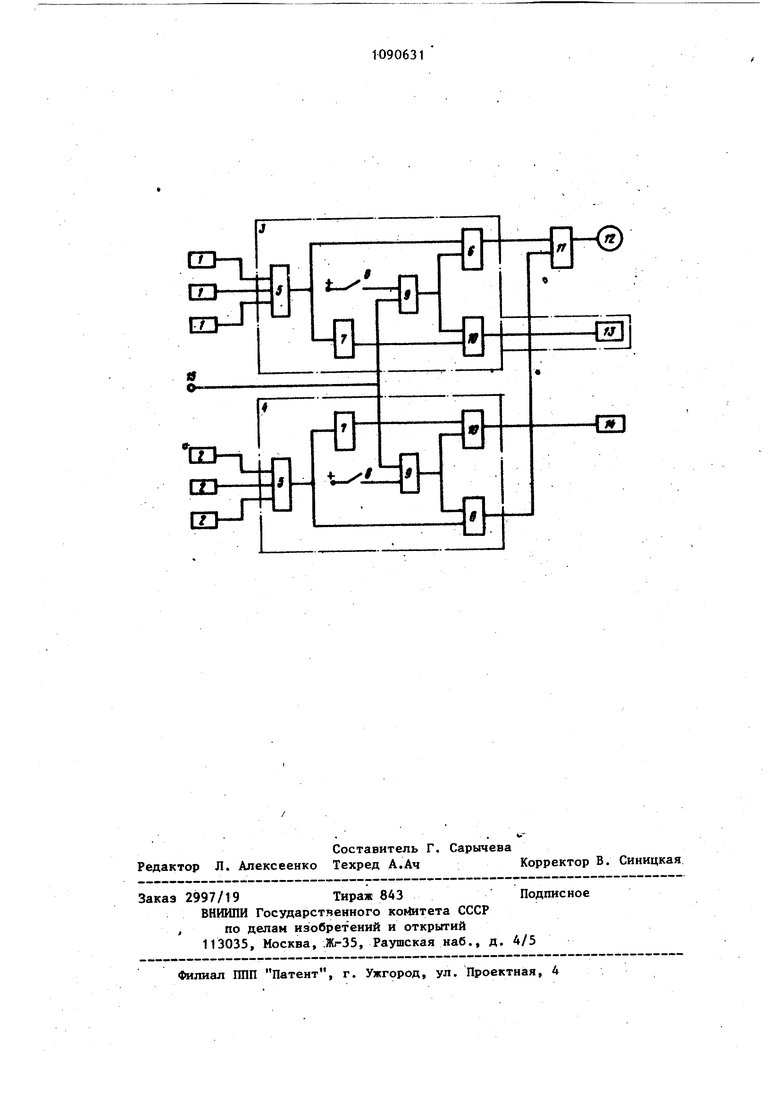
11 . Изобретение относится к области хранения штучных грузов, а именно к устройствам для управления передвижными стеллажами. Известны устройства для управления системами передвижных механизированных стеллажей, содержащие подпружиненные электроуправляемые штоки, взаимодействующие с кнопками управления стеллажей, предохранител ные планки, закрепленные на противо положных сторонах стеллажей,и датчики, взаимодействзтощие с лредохранительными плёнкa 0{, размещенные на стеллажах и связанные с тормозными колодками привода перемещения l . Недостатком устройств этого типа является их низкая надежность, обус ловленная тем, что приводы одновременно перемещающихся группой стелла жей работают независимо и вследствие разброса скоростей стеллажи при перемещении соприкасаются предохранительными планками и останавливаются не достигнув заданного положения. Известно устройство для автомати ческого управления передвижными стеллажами, содержащее размещенные ,на противоположных сторонах стеллажа наличия свободного прохо да и блоки формирования команд прямого и обратного перемещений калвд го стеллажа, включающие в себя каждый кнопки управления, размещенные на противоположных сторонах стеллажа, элементы задания последовательности перемещений стеллажей, элементы НЕ и ПАМЯТЬ и элементы И, вхрды первого из которых соединены с одними из упомянутых датчиков, а выход - с входом второго элемента И. Это устройство обеспечивает управление перемещением передвижных стеллажей, удобно в, эксплуатации, более надежно zj . К недостаткам этого устройства . относятся его сложность, наличие электрических связей между блоками управления всех стеллажей, что усложняет конструкцию устройства и снижает его надежность. Цель изобретения - повьщ1ение надежности и упрощение конструкции. Поставленная цель достигается те что в устройстве, содержащем размещенные на противоположных сторонах стеллажа датчики наличия свободного 1 :прохода и блоки формирования команд прямого и обратного перемещений каждого стеллажа, включающие в себя каждый кнопки управления, размещенные на противоположных сторонах стеллажа, элементы задания последовательности перемещений стеллажей, элементы НЕ и ПАМЯТЬ и элементы И, входы первого из которых соединены с одним из упомянутых датчиков, а выход - с входом второго элемента И, элементы задания последовательности перемещений стеллажей выполнены в виде вьщвижных упоров, размещенных с обеих сторон каждого стеллажа на уровне кнопок управления, при этом в каждом блоке формирования команд прямого и обратного перемещений каждого стеллажа входы элемента ПАМЯТЬ соединены с шиной сброса и соответствукщей кнопкой управления, выход - с другим входом второго элемента И и одним из входов третьего элемента И, второй вход которого соединен с выходом первого элемента И через элемент НЕ, а выходс приводом пер,емещения выдвижного упора, причем выход второго элемента И является выходом этого блока. На чертеже приведена схема предлагаемого устройства. Устройство содержит датчики 1 и 2, расположенные на противоположных боковых сторонах передвижного стеллажа и подключенные соответственно к блоку 3 фо мирования команд прямого перемещения стеллажа и к блоку 4 формирования команд обратного перемещения стеллажа. Внутренняя структура блоков 3 и 4 совершенно одинакова. На входы первого элемента И 5 подключены датчики 1(2). Выход элемента И 5 связан с входом второго элемента И 6 и элемента НЕ 7. Кнопка 8 управления подключена на вход элемента ПАМЯТЬ 9, выход которого связан с входом второго элемента И 6 и третьего элементами 10. Выход второго элемента И 6 является первым вь1ходом блока 3(4) и подключен к соответствующему входу блока 11 реверсирования, связанного с электродвигателем 12. Выход третьего элемента И 10 является вторым выходом блока 3(4) и подключен.к приводу вьщвижных упоров 13 и 14. К соответствую ющим входам элементов ПАМЯТЬ 9 подключена цепь 15 сброса. Устройство для автоматического управления передвижными стеллажами работает следующим образом. Рассмотрим его работу на примере склада, состоящего из комплекта передвижных стеллажей, снабженных предлагаемым устройством управления и расположенных вплотную друг к дру гу с возможностью образовывать ORWH проход меяаду любыми двумя соседними стеллажами. Для образования прохода между какими-либо двумя стеллажами оператору необходимо нажать кнопку 8 управления одного из этих стеллажей, расположенного ближе к имбющемуЬя проходу, командующую его перемещением в наПр авлении прохода. При этом на входе элемента ПАМЯТЬ 9 возникает сигнал, который устанавJIиiвaeт его в единичное состояние. ,С-его выхода сигнал поступает на ;входы элементов И 6 и 10. Второй вход элемента И 6 связан с выходом элемента И 5 непосредственно, а вто рой вход элемента И 1Q связан с выходом элемента И 5 через элемент НЕ 7. Если мезвду этим стеллажом и проходом находятся другие стеллажи, то датчики 1 и 2 не свободны, на входах элемента И 5 и его выходе присутствует нулевой сигнал, а на выходе элемента НЕ 7 единичный, следовательно, появляется сигнал на выходе элемента И 10, котор| 1й включает упора 13(14). ynojp выдвигается и нажимает кнопку 8 управления рядом стоящего стеллажа. Схема этого стеллажа реагирует на нажатие кнопки 8 аналогичньш образом, и в результате на нем также вьщвигавгся упор 13(14), нажимает кнопку 8 соседнего стеллажа и т.д. до тех пор, пока не будет нажата кнопка 8 стеллажа, стоящег: о в проходе. Свободные датчики 1 и 2 этого стеллажа подают единичный сигнал на входы элемента И 5, с выхода которо сигнал поступает на вход элемента И 6, на другом входе которого имеется сигнал от элемента ПАМЯТЬ 9. На входе элемента И 6 появляется .сигнал, который поступает на вход блока 11 реверсирования. Включается электродвигатель 12, и стеллаж начинает перемещаться. При этом он освобождает датчики стоящего за ним стеллажа, на выходе его Ьлемен14та И 5 появляется единичный сигнал. На выходе элемента НЕ 7 сигнал становится нулевым, исчезает сигнал на входе привода упора 13(14) и шток возвращается в исходное положение. Одновременно появляется- сигнал на вьгходе элемента И 6, поступает на вход блока 11 реверсирования и с выдержкой времени, установленной в блоке 11, включается электродвигатель 12, и этот стеллаж также начинает перемещаться. Процесс перемещения последукицих передвижных стеллажей происходит аналогично по мере освобождения их датчиков 1 и 2, вплоть до того-стеллажа, кнопку которого нажал оператор - последний перемещаюпшйся стеллаж в группе. Остановка первого перемещающегося стеллажа происходит при его встрече с остановом или впереди стоящим стеллажом. На выходе датчиков 1 и 2 исчезают сигналы, по цепи 15 на вход элемента ПАМЯТЬ 9 поступает сигнал Сброс, и элемент 9 переходит в нулевое состояние. Поступление сигнала в блок 11 реверсирования прекращается, отключается электродвигатель 12, и стеллаж останавливается. Аналогичным образом происходит последовательно остановка всех остальных перемещавпшхся друг .за другом стеллажей. В более простом случае, когда между стеллажом, кнолку 8 которого нажал оператор, и проходом нет других стеллажей, сигналы от датчиков 1 и 2 этого стеллажа поступают на вход элемента И 5, с выхода элемента И 5 и элемента ПАМЯТЬ 9 приходит два сигнала на вход элемента И 6, с выхода которого сигнал поступает на вход блока It Р эверсирования, включается электродвигатель 12, и стеллаж начинает перемещаться. Остановка стеллажа происходит, когда при наезде на упор или на впереди стоящий стеллаж срабатывают датчики 1 и 2. Так при использовании предлагаемого устройства происходит перемещение одного стеллажа или группы передвижных стеллажей в сторону имекяцегося прохода для образования нового прохода. , Применение изобретения позволяет повысить надежность работы и упрос-. тить устройство для автоматического управления передвижным стеллажом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления передвижными стеллажами | 1976 |
|
SU653179A1 |
| Устройство для автоматического управления передвижными стеллажами | 1983 |
|
SU1175811A1 |
| Труборезный автомат | 1982 |
|
SU1055593A1 |
| ШТАБЕЛИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2017675C1 |
| Установка для изготовления длинномерных заготовок электрических кабелей | 1989 |
|
SU1700667A1 |
| Устройство автоматического управления электродвигателем перемещения загрузочной машины | 1980 |
|
SU926486A1 |
| Устройство для управления механизмом намотки | 1978 |
|
SU716959A1 |
| Устройство для автоматическогоРАСпРЕдЕлЕНия ТРуб пО пОТОчНыМ лиНияМиХ ОТдЕлКи | 1979 |
|
SU806186A1 |
| Система для программного управления двумя механизмами | 1987 |
|
SU1478192A1 |
| Способ штамповки деталей из полосового материала и установка для его осуществления | 1987 |
|
SU1586826A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРЕДВИЖНЫМИ СТЕЛЛАЖАМИ, содержащее размещенные на противоположных сторонах стеллажа датчики наличия свободного прохода и блоки формирования команд прямого и обратного перемещений каждого стеллажа, включающие в себя каждый кнопки управления, размещенные на противоположных сторонах стеллажа, элементы задания последовательности перемещений стеллажей, элементы НЕ и ПАМЯТЬ и элементы И, входы пер.вого из которых соединены с одним из упомянутых датчиков, а выход - с BkoAOM второго элемента И, отличающееся тем, что, с целью повышения надежности и упрощения конструкции, элементы задания последовательности перемещений стеллажей выполнены в виде выцвижных упоров, размещенных с обеих сторон каждого степлажа на уровне кнопок управления, при этом в каждом блоке формирования команд прямого и обратного перемещений каждого стеллажа входы элемента ПАМЯТЬ соединены с щиной сброса и соответствующей кнопкой управления, выход - с другим входом второго элемента И и одним из входов третьего элемента И, .второй вход которого соединен с выходом первого элемента И через элемент НЕ, а выход - с приводом перемещения выдвижного упора, причем выход второго элемента И является выСО этого блока. о а 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления системой передвижных механизированных стеллажей | 1976 |
|
SU629132A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления передвижными стеллажами | 1976 |
|
SU653179A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
