1 Изобретение относится к технике телевидения и может быть использовано в системах слежения для определения координат быстродвижущихся объек тов. Известно телевизионное устройство для измерения координат движущегося объекта, содержащее последовательно соединенные телевизионную камеру, элемент И, пороговый блок, блок селекции видеосигнала, блок определекия координат, генератор дополнитель ного строба и коммутатор, генератор сигнала запрета, вторьй и третий эле мент И, генератор строба, вход которого соединен с выходом блока опреде ления координат, а выход подключен к входу второго элемента И, второй, вход второго элемента И соединен с первым выходом генератора сигнала запрета, а выход подключен к второму входу первого элемента И, первый вход третьего элемента И соединен с вторым выходом генератора сигнала запрета, второй вход с вторьпу выходом генератора строба и с вторым входом коммутатора, а выход подключен к третьему входу коммутатора, выход которого подключен к второму входу блока селекции видеосигналаCl .
Первоначальный выбор объекта следящим стробом в этом устройстве осуществляет оператор, который в случае быстродв1С сущейся цели, существующей в поле зрения системы (единицы секунд), не успевает провести операцию стробирования и пропускает объект не успевая измерить его координаты.
Наиболее близким к изобретению по техническому решению является телевизионное устройство для измерения координат движущегося объекта, содержащее передающую телевизионную камеру, блок селекции движущихся целей и блок определения координат 2.
Однако это устройство при низком отношении сигнал/шум определяет координаты ложных объектов,-что обуславливает низкую достоверность результатов измерений.
Цель изобретения - повьшение достоверности измерения координат быстродвижущегося объекта.
Цель достигается тем, что в телевизионное устройство для измерения координат движущегося объекта, содержащее передающую телевизионную камеру, блок селекции движущихся целей (СДЦ) и блок определения координат.
работает следующим образом.
Сигнал изображения контролируемой области пространства формирует передающая телевизионная камера 1. Блок 2
г СДЦ совместно с элементом И 3 вьщеляет движущиеся объекты, но не в полном объеме пространства, а в его части, называемой зоной обнаружения. Зону обнаружения формирует формиро0 ватель 7 зоны обнаружения. В исходном состоянии сигнал этой зоны в виде уровня напряжения подается через коммутатор 6 на первый вход элемента И 3 по разрещающему сигналу триггера 8.
Разрешающий сигнал с триггера 8 обеспечивается подачей сигнала по шине установки исходного состояния. На выходе элемента И 3 получают сигналы от движущихся объектов, появляющихся
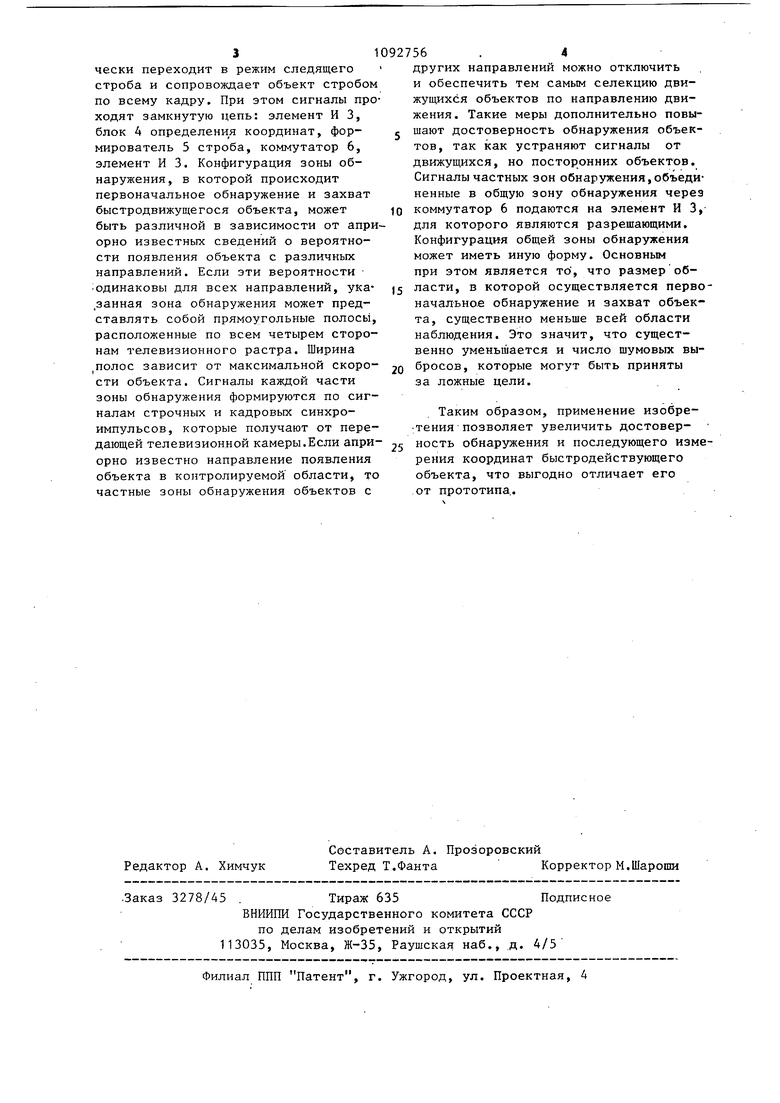
Q только в заданной зоне обнаружения. При появлении такого сигнала на выходе элемента -ИЗ, определяют координаты с помощью блока 4 определения координат. Одновременно сигнал с выхода элемента И 3 опрокидывает триггер 8, тем самым переводя коммутатор 6 на пропускание сигналов с формирователя 5 строба. Начиная с этого момента, устройство автомати6введены последовательно соединенные формирователь строба, входы которого соединены с выходами блока определения координат, коммутатор, элемент И, второй вход которого подключен к выходу блока селекции движущихся целей (СДЦ), и триггер, второй вход которого соединен с шиной установки исходного состояния, а выход - со вторым входом коммутатора, формирователь зоны обнаружения, выход которого соединен с третьим входом коммутатора, причем вход блока определения координат соединен с выходом элемента И, а вход блока селекции движущихся целей - с выходом передающей телевизионной камеры. На чертеже приведена структурная схема телевизионного устройства для измерения координат движущегося объекта. Телевизионное устройство для измерения координат движущегося объекта содержит передающую телевизионную камеру 1, блок 2 СДЦ, элемент 3, блок 4 определения координат, формирователь 5 строба, коммутатор 6 и формирователь 7 зоны обнаружения. Телевизионное устройство для из30 мерения координат движущегося объекта
чески переходит в режим следящего строба и сопровождает объект стробом по всему кадру. При этом сигналы проходят замкнутую цепь: элемент ИЗ, блок А определения координат, формирователь 5 строба, коммутатор 6, элемент И 3. Конфигурация зоны обнаружения, в которой происходит первоначальное обнаружение и захват быстродвижущегося объекта, может быть различной в зависимости от априорно известных сведений о вероятности появления объекта с различных направлений. Если эти вероятности одинаковы для всех направлений, ука.занная зона обнаружения может представлять собой прямоугольные полосы, расположенные по всем четырем сторонам телевизионного растра. Ширина полос зависит от максимальной скорости объекта. Сигналы каждой части зоны обнаружения формируются по сигналам строчных и кадровых синхроимпульсов, которые получают от передающей телевизионной камеры.Если априорно известно направление появления объекта в контролируемой области, то частные зоны обнаружения объектов с
других направлений можно отключить и обеспечить тем самым селекцию движущихся объектов по направлению движения. Такие меры дополнительно повышают достоверность обнаружения объектов, так как устраняют сигналы от движущихся, но посторонних объектов. Сигналы частных зон обнаружения,объединенные в общую зону обнаружения через
коммутатор 6 подаются на элемент ИЗ, для которого являются разрешающими. Конфигурация общей зоны обнаружения может иметь иную форму. Основным при этом является то, что размер области, в которой осуществляется первоначально.е обнаружение и захват объекта, существенно меньше всей области наблюдения. Это значит, что существенно уменьшается и число шумовых выбросов, которые могут быть приняты за ложные цели.
Таким образом, применение изобре:тения позволяет увеличить достоверность обнаружения и последующего измерения координат быстродействующего объекта, что выгодно отличает его от прототипа..
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионный пеленгатор | 1989 |
|
SU1670805A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2470318C1 |
| Селектор сигналов движущихся объектов | 1975 |
|
SU555357A1 |
| СИСТЕМА ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006942C1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1286089A1 |
| СПОСОБ ОБЗОРА ЗОНЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2009 |
|
RU2408028C1 |
| Устройство для измерения координат и размеров объектов | 1987 |
|
SU1617665A1 |
| Телевизионное следящее устройство | 1977 |
|
SU684783A1 |
ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ДВШ(УЩЕГОСЯ ОБЪЕКТА, содержащее передающую телевизионную камеру, блок селекции движущихся целей и блок определения координат, отличающееся тем, что, с целью повьпяеиия достоверности измерения координат быстродвижущегося объекта, введены последовательно соединенные формирователь строба, входы которого соединены с выходами блока определения координат, коммутатор, элемент И, второй вход которого подключен к выходу блока селекции движущихся целей, и триггер, второй вход которого соединен с шиной установки исходного состояния, а выход - со вторым входом коммутатора, формирователь зоны обнаружения, выход которого соединен с третьим входом коммутатора, причем I вход блока определения координат соединен с выходом элемента И, а (Л вход блока селекции движущихся целей - с выходом передающей телевизионной камеры.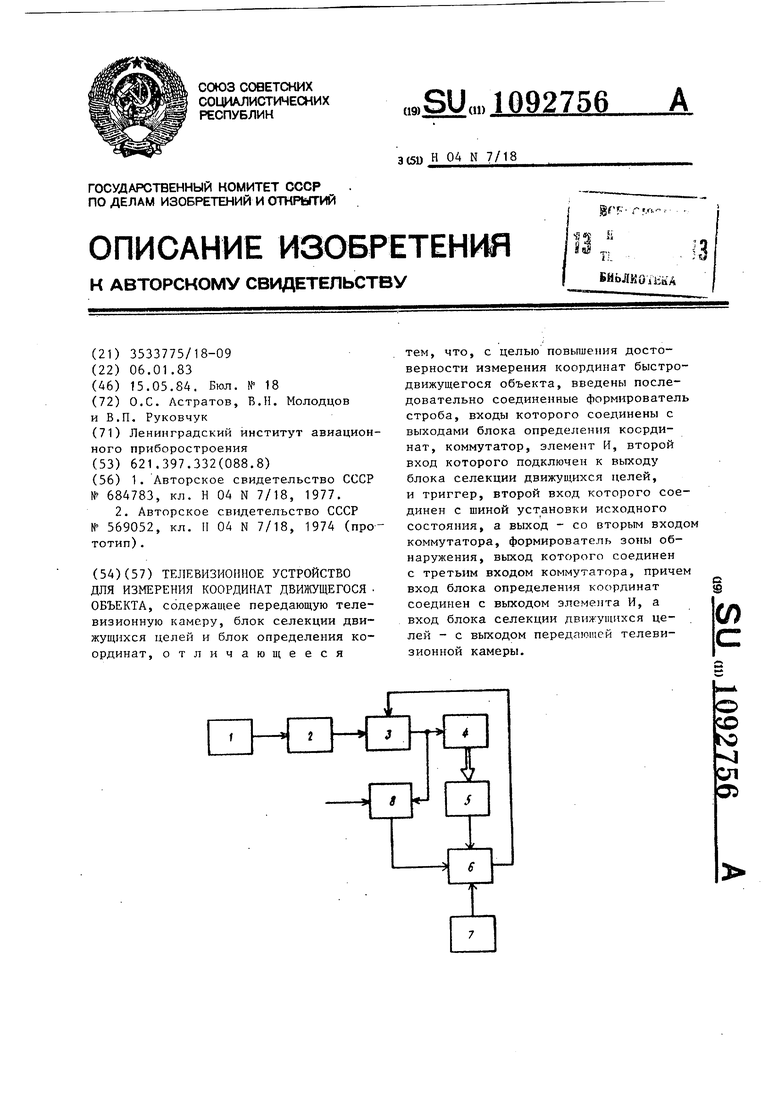
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Телевизионное следящее устройство | 1977 |
|
SU684783A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Телевизионное устройство селекции движущего объекта и определения его координат | 1974 |
|
SU569052A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
