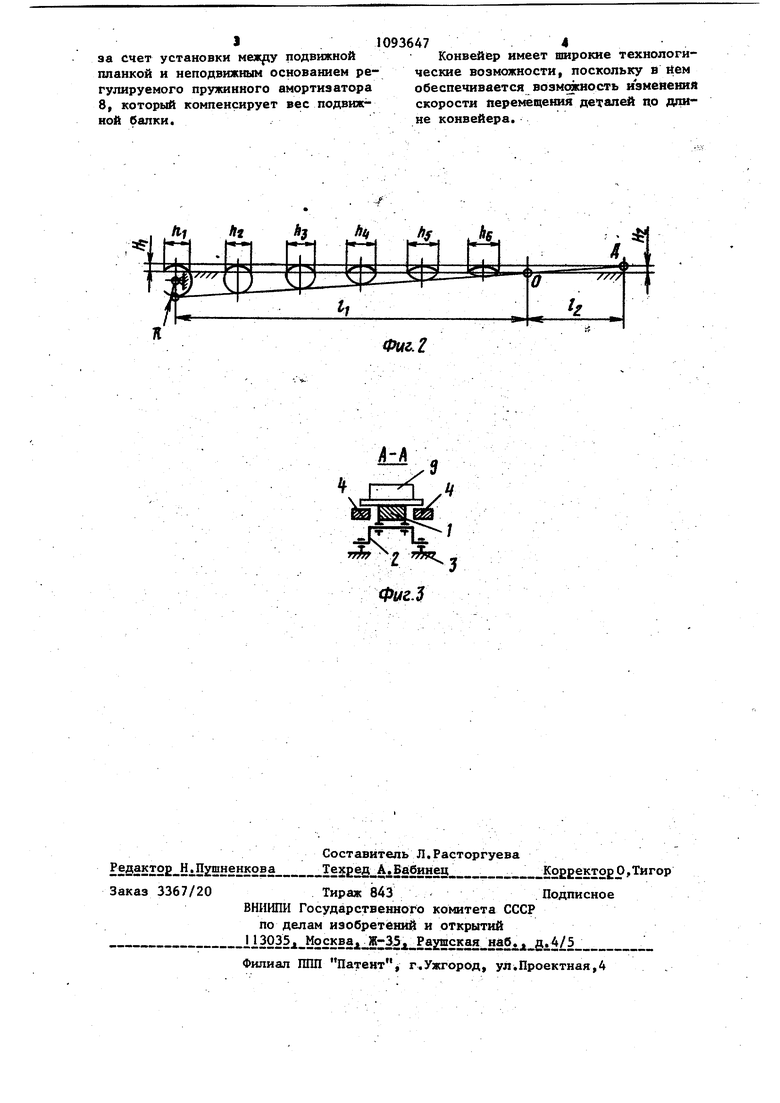
Изобретение относится к машиноа именно к конвейерам для строению, прерывистого транспортирования плоских деталей и заготовок. Известен шаговый конвейер, содержащий основание, неподвижную и подвижную рамы, соединенную с приводом ведуощм эвеном, которое вьшолнено иэ кривошипа, установленного на валу привода, шатунов с роликами на одном конце и закрепденньпс на основа ний горизонтальных площадок для опирания на них роликов шатунов , Наиболее близким техническим решением к предлсдкенному является шаговый конвейер, содержа ф1й закрепленные на основании неподвижные направляющие, подвижную планку, и шарнирно связаншлй с неподвижным основа нием и одним концом подвижной планки эксцентриковый привод 2. Недостатком указанных конвейеров является то, что их конструкция не обеспечивает возможности изменения скорости перемещения деталей по длин конвейера, т.е. конвейер имеет узкие технологические возможности. Целью изобретения является расширение технологических возможностей конвейера. Указа:нная цель достигается тем, что в шаговом конвейере, содержащем закрепленные на основании неподвижны направлякяцие, подвижную планку, и шарнирно связанный с неподвижным основанием и одним концом подвижной планки эксцентриковый привод, подвижная планка снабжена закрепленным на ее другом конце роликом, а основание снабжено опорой, установленной с воз можностью регулирования ее по высоте при этом ролик установлен с возможностью возвратно-поступательного перемещения по опоре. Причем механизм регулирования опо ры по высоте выполнен в виде домкратов, При этом опора выполнена в виде пластины. :Кроме того, подвижная планка в средней части подпружинена к основанию посредством амортизатора. На фиг, 1 изображена кинематическая схема предлагаемого конвейера; на , 2 - траектории различных точек подвижной планки относительно неподвижной направлякщей; на фиг.З разрез А-А на фиг;1. 472 Конвейер содержит подвижную планку 1 (фиг.1) , которая в точке Б шарнирно связана с эксцентриковым приводом 2, который в точке А шарнирно связан с неподвижным основанием 3,. причем на неподвижном основании закреплены неподвижные направляющие А, верхняя плоскость которых в крайнем верхнем положении подвижной планки 1 ниже верхней плоскости подвижной планг ки на величину Н, которая определяется радиусом эксцентрика эксцентрикового- привода 2 и требуемым шагом перемещения h детали (фиг.2). На другом конце подвижной планки в точке Д закреплен ролик 5, который опирается на неподвижную опору 6 с возможностью возвратно-поступательного перемещения по ней. Неподвижная опора 6 может- быть выполнена в виде пластины с возможностью регулирования положения на высоте Н2 и наклону относительно поверхности неподвижных направляюа|их 4 с помощью, например. домкратов 7, которые являются механизмом регулирования. .Конвейер может быть снабжен по меньшей мере одним пружинным амортизатором 8, который шарнирно связан с подвижной планкой I средней ее части - в точке Вис неподвижным основанием 3 в точке Г. . Конвейер работает следунэдим образом. При вращении эксцентрикового привода 2 вокруг оси А подвижная планка I совершает сложное движение. Точки верхней плоскости подвижной ппанки описывают различные траектории. По мере удаления от точки А в направлении к точке Д траектории точек верхней плоскости из окружности превращаются в шатунные кривые, при этом шаги, а соответственно и скорость перемещения изделий 9 могут как увеличиваться, так и уменьшаться или оставаться постоянными, что определяется высотой Но верхней плоскости подвижной лшанки 1 относительно верхней плоскости неподвижных направлякицих 4, Высота Hj регулируется с помощью домкратов 7, На участке ОД транспортирование не осуществляется. Уменьшение потребной мощности на транспортирование обеспечивается за счет уменьшения высоты подъема центра Тяжести подвижной планки, а также за счет установки межру подвижной планкой и неподвижным основанием регулируемого пружинного амортизатора 8, который компенсирует вес подвижной балки. 0936474 Конвейер имеет широкие технологические возможности, поскольку в йем обеспечивается возмоакиость изменения скорости перемещения деталей до длине конвейера.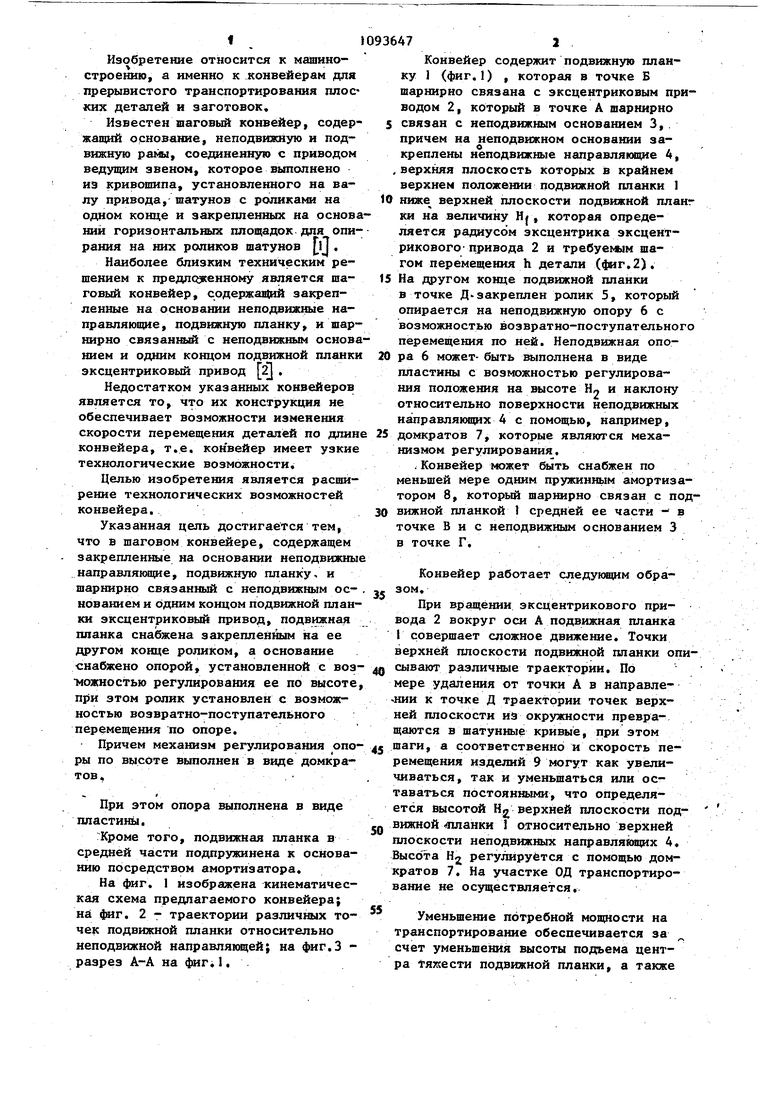
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Шаговый конвейер | 1982 |
|
SU1027111A1 |
| Шаговый реверсивный конвейер | 1982 |
|
SU1070088A1 |
| Шагающий конвейер | 1982 |
|
SU1051003A2 |
| Шаговый конвейер | 1977 |
|
SU707863A1 |
| Шаговый конвейер | 1983 |
|
SU1155525A1 |
| Шаговый конвейер | 1982 |
|
SU1025612A1 |
| МАШИНА КЛЕЕВАЯ-КРОМКОЗАГИБОЧНАЯ ПОВОРОТНАЯ, РАБОТАЮЩАЯ В ПРЕРЫВИСТОМ РЕЖИМЕ И ПРЕДНАЗНАЧЕННАЯ ДЛЯ ПОЛУЧЕНИЯ МЕТАЛЛИЧЕСКИХ КРЫШЕК БОЛЬШОГО РАЗМЕРА И РАЗНОЙ ФОРМЫ | 2010 |
|
RU2559068C2 |
| Устройство для укладки длинномерных изделий в пакет | 1989 |
|
SU1756248A1 |
1. ШАГОВЫЙ КОНВЕЙЕР, со- . держащий закрепленные на основании неподвижные направляющие, подвижную планку и шарннрно связанный с неподвижным основанием и одним концом подвижной планки эксцентриковый привод, отличающийся тем, что, с целью расширения технологических возможностей конвейера, подвижная план ка снабжена закреплен1г 1м на ее другом конце роликом, а основание снабжено опорой, установленной с возможностью регулирования ее по высоте, при этом ролик установлен с возможностью возвратно-поступательного перемещения по опоре. 2.Конвейер по п.1, о т л и ч а ю щ и и с я тем, что механизм регулирования опоры по высоте выполнен в виде домкратов. 3.Конвейер по п.1, о т л и ч а ю щ и и с я тем, что опора выполг нена в виде пластины.г 4.Конвейер по п.1,о т л и ч а ю щ и и с я тем, что подвижная планка в средней части подпружинена к основанию посредством амортизатора.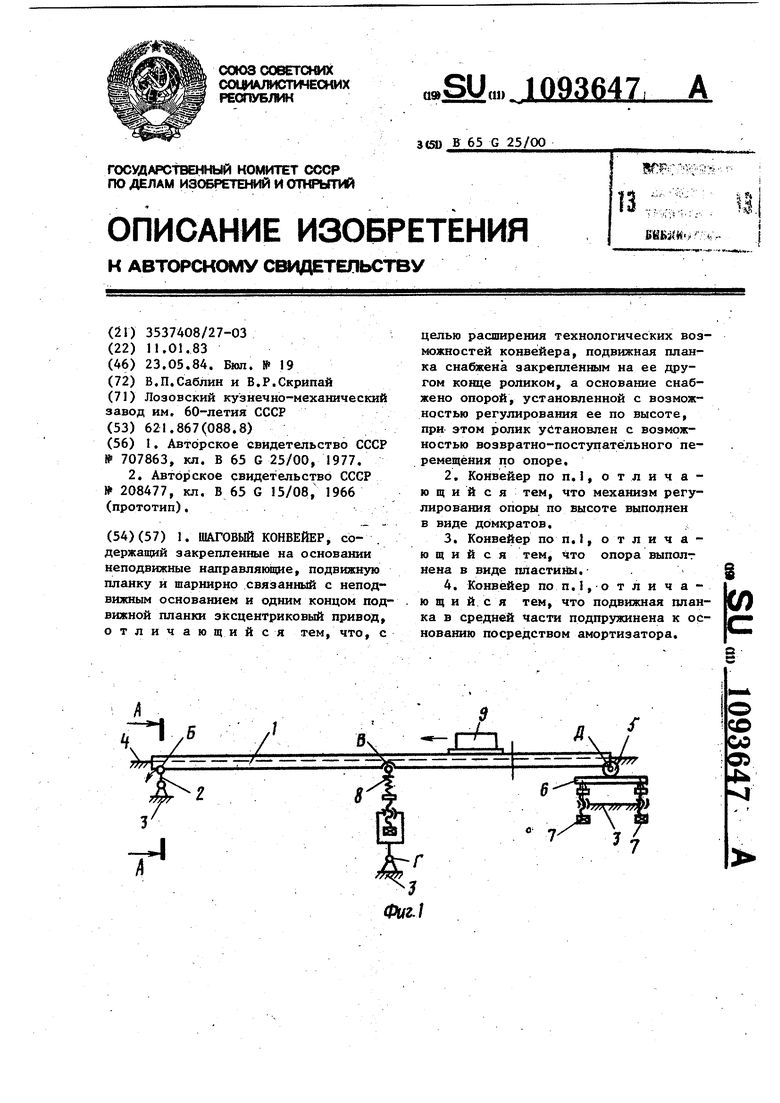
Фиг. 2
.№/
7 7
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шаговый конвейер | 1977 |
|
SU707863A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПУЛЬСИРУЮЩИЙ КОНВЕЙЕР ДЛЯ СОРТИРОВКИ ШЕРСТИ | 0 |
|
SU208477A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| . | |||
