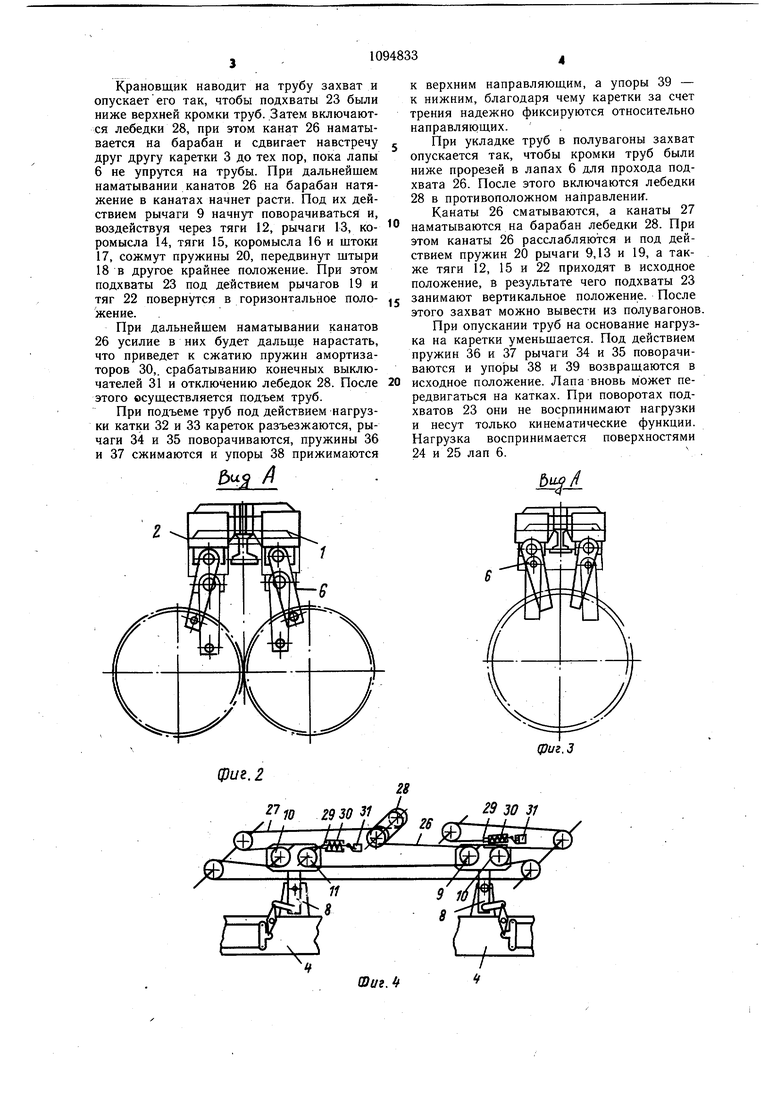
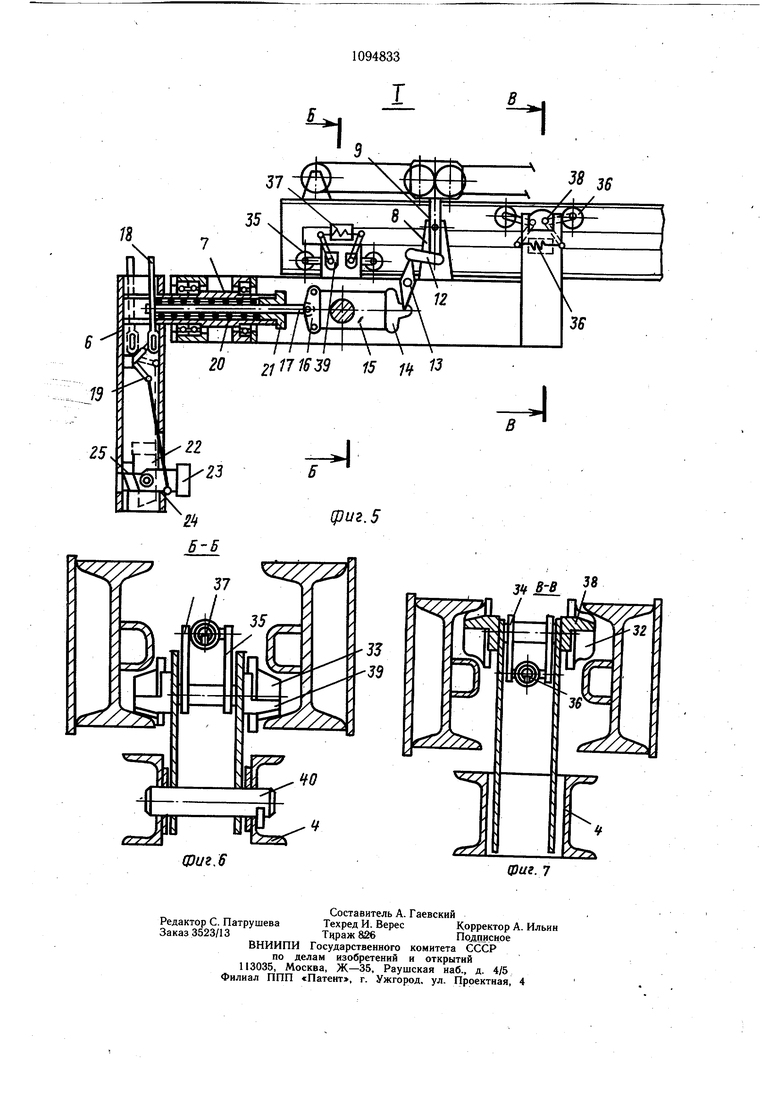
Изобретение относится к подъемно-транспортному машиностроению, а именно к грузрзахватным устройствам, предназначенным для автоматического захвата труб. По основному авт. св. № 1071565 навеет- , но захватное устройство, содержащее подвешиваемую к грузоподъемному средству траверсу, выполненную в виде соединенных между собой направляющих, несущих- приводные верхние каретки с обводными блоками, огибаемыми приводными канатами. О Верхние каретки соединены балками с нижними каретками, балки одним концом жестко прикреплены к верхним кареткам, а другим соединены с поворотно смонтированными на них захватными лапами с подхва- ., тами, при,этом балки шарнирно прикреплены к нижним кареткам и ось их крепления расположена перпендикулярно 1оси крепления захватных лап к балке 1. Однако в известном устройстве для вывода подхватов из труб, находящихся в 20 полувагоне, требуется свободное пространство с каждой стороны трубы. В связи с этим крановщик при укладке труб в полувагоны должен предусмотреть с каждого торца равные зазоры, достаточные для их , вывода. Если зазор с одной стороны окажется недостаточным, то вывести подхват будет невозможно. При этом придется вновь поднять и опустить трубы с таким расчетом, чтобы обеспечить необходимые зазоры. В результате этого эффективность работы зо захвата снижается. Кроме того, необходимость наличия больших зазоров в полувагонах для укладки и выемки труб требует уменьщенных размеров последних. Цель изобретения - повышение эффек- 35 тивности работы захвата. Цель достигается тем, что в захватном устройстве для длинномерных грузов захватные лапы выполнены с полостью, в которой смонтирован с возможностью поворота в40 вертикальной плоскости подхват, кинематически связанный с приводом перемещения кареток. Кроме того, кинематическая связь включает установленный на балке подпружиненный шток, один конец которого посред- , ством двуплечего рычага и жесткой тяги соединен с подхватом захватной лапы, а второй посредством коромысла и гибких тяг-с приводом перемещения кареток. На фиг. 1 изображено устройство, общий вид; ,на фиг. 2 - вид А на фиг. 1 в jO положении подъема двух труб; на фиг. 3 - вид А на фиг. 1 в положении подъема одной трубы; на фиг. 4 - кинематическая схема привода тележек; на фиг. 5 - узел I на фиг. I; на фиг. 6 - разрез Б-Б на фиг. 5; на фиг. 7 - разрез В-В на фиг. 5. 55 Устройство содержит траверсу, выполненную в виде соединенных между собой направляющих 1 и 2, на каждой из которых перемещается каретка 3, жестко связанная с балкой 4, и каретка 5, щарнирно соединенная с балкой 4. Захватные лапы 6, закреплены на балке посредством полой оси 1. На балке 4 укреплен кронштейн 8, на котором поворотно смонтирован двуплечий рычаг 9. На одном плече этого рычага укреплены блоки 10 и И, а другое плечо шарнирно связано с тягой 12, которая также шарнирно соединена с другим двуплечим рычагом 13. Второе плечо рычага 13 через коромысло 14 шарнирно связано через тяги 15 с коромыслом 16, которое, в свою очередь, поворотно соединено со штоком 17. Последний соединен с перпендикулярно расположенным штырем 18, концы которого проходят сквозь продольные пары в оси 7. Один конец штыря 18 с помощью паза соединен с двуплечим рычагом 19 размещенным в лапе 6. Штырь отжимается Пружиной, 20, поджимаемой с другой стороны регулировочной гайкой 21, вворачиваемой в ось 7. Рычаг 19 своим другим плечом соединен с тягами 22, которые шарнирно соединены с подхватом 23. Подхват 23 на лапе закреплен щарнирно и при повороте опирается своей передней и хвостовой частью соответственно на поверхности 24 и 25 лапы 6. Каретки 3 приводятся в движение канатами 26 и 27 один из которых наматывается на лебедку 28, установленную на траверсе, а другой сматывается с нее. При этом канат 26, сойдя с лебедки 28, охватывает блоки 11 двух кареток 3, расположенных на одной из направляющих 1 или 2, а затем закрепляется на 29 одного из амортизаторов 30. Шток амортизатора взаимодействует с конечным выключателем 31. Каретки 3 и 5 принципиально выполнены одинаковой конструкции. Каретка 3 связана с балкой 4 жестко и установлена с возможностью взаимодействия своими катками 32 с верхними полками направляю„ с л л соединена с балкой 4 шар™Р« Установлена с возможностью взаимодеиствия своими катками 33 с нижними полками направляющих. При этом катки установлены на одних концах двуплечих ры 4 и 35, щарнирно связанных с карет- ками 3 и 5, другие концы рычагов связаны пружинами 36 и 37. На к аретках 3 установлены по одному с каждой сторонь упоры 3, на каретках 5 по два с каждой сторо« У™Р 9- Каретка 5 крепится к балке посредством оси 40. Устройство навещйвается на крюк грузоподъемного средства, Автоматический захват работает следующим образом. В исходном положении каретки 3 раздвинуты максимально, при этом подхваты 26 под действием пружин 20, штырей 18, рычагов 19 и тяг 22 находятся в поднятом положении (показано пунктиром).
Крановщик наводит на трубу захват и опускает его так, чтобы подхваты 23 были ниже верхней кромки труб. Затем включаются лебедки 28, при этом канат 26 наматывается на барабан и сдвигает навстречу друг другу каретки 3 до тех пор, пока лапы 6 не упрутся на трубы. При дальнейшем наматывании канатов 26 на барабан натяжение в канатах начнет расти. Под их действием рычаги 9 начнут поворачиваться и, воздействуя через тяги 12, рычаги 13, коромысла 14, тяги 15, коромысла 16 и штоки 17, сожмут пружины 20, передвинут штыри 18 в другое крайнее положение. При этом подхваты 23 под действием рычагов 19 и тяг 22 повернутся в горизонтальное положение.
При дальнейшем наматывании канатов 26 усилие в них будет дальше нарастать, что приведет к сжатию пружин амортизаторов 30,. срабатыванию конечных выключателей 31 и отключению лебедок 28. После этого всуш.ествляется подъем труб.
При подъеме труб под действием нагрузки катки 32 и 33 кареток разъезжаются, рычаги 34 и 35 поворачиваются, пружины 36 и 37 сжимаются и упоры 38 прижимаются
к верхним направляюшим, а упоры 39 - к нижним, благодаря чему каретки за счет трения надежно фиксируются относительно направляющих.
При укладке труб в полувагоны захват опускается так, чтобы кромки труб были ниже прорезей в лапах 6 для прохода подхвата 26. После этого включаются лебедки 28 в противоположном направлении.
Канаты 26 сматываются, а канаты 27 наматываются на барабан лебедки 28. При этом канаты 26 расслабляются и под действием пружин 20 рычаги 9,13 и 19, а также тяги 12, 15 и 22 приходят в исходное положение, в результате чего подхваты 23 занимают вертикальное положение. После этого захват можно вывести из полувагонов
При опускании труб на основание нагрузка на каретки уменьшается. Под действием пружин 36 и 37 рычаги 34 и 35 поворачиваются и упоры 38 и 39 возвращаются в исходное положение. Лапа вновь может передвигаться на катках. При поворотах подхватов 23 они не восрпинимают нагрузки и несут только кинематические функции. Нагрузка воспринимается поверхностями 24 и 25 лап 6.
и л
фиг.З
гв 30 31
ШигЛ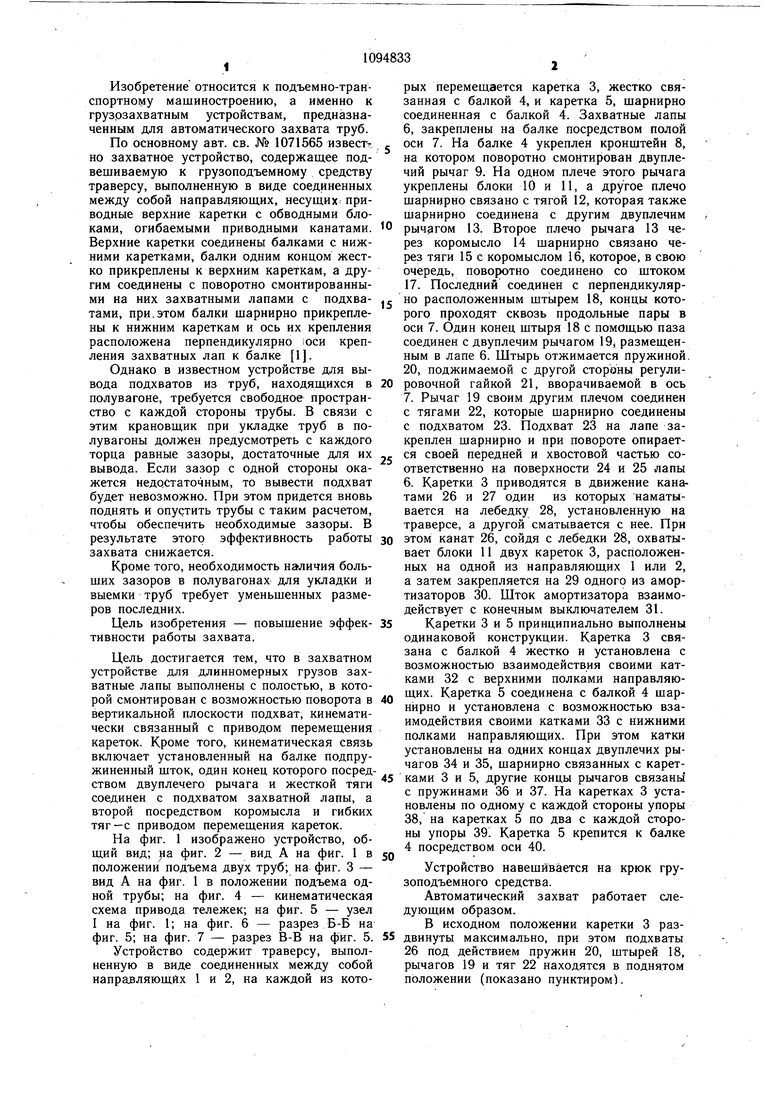
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |
| Кран мостового типа | 1980 |
|
SU893826A2 |
| Подъемный кран с жестко подвешенным захватным органом | 1960 |
|
SU139058A1 |
| КАНТОВАТЕЛЬ ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ | 2004 |
|
RU2281844C2 |
| Кран мостового типа | 1980 |
|
SU893825A2 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| Грузозахватное устройство | 1980 |
|
SU912623A1 |
1. ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ДЛИННОМЕРНЫХ ГРУЗОВ по авт. св. № 1071565, отличающееся тем, что, с целью повышения эффективности работы, захватные лапы выполнены с полостью, в которой смонтирован с возможностью поворота в вертикальной плоскости подхват, кинематически связанный с приводом перемещения кареток. 2. Захватное устройство по п. 1, отличающееся тем, что кинематическая связь включает установленный на балке подпружиненный шток, один конец которого посредством двуплечего рычага и жесткой тяги соединен с подхватом захватной лапы, а второй посредством коромысла и гибких тяг - с приводом перемешения кареток. со N 00 оо со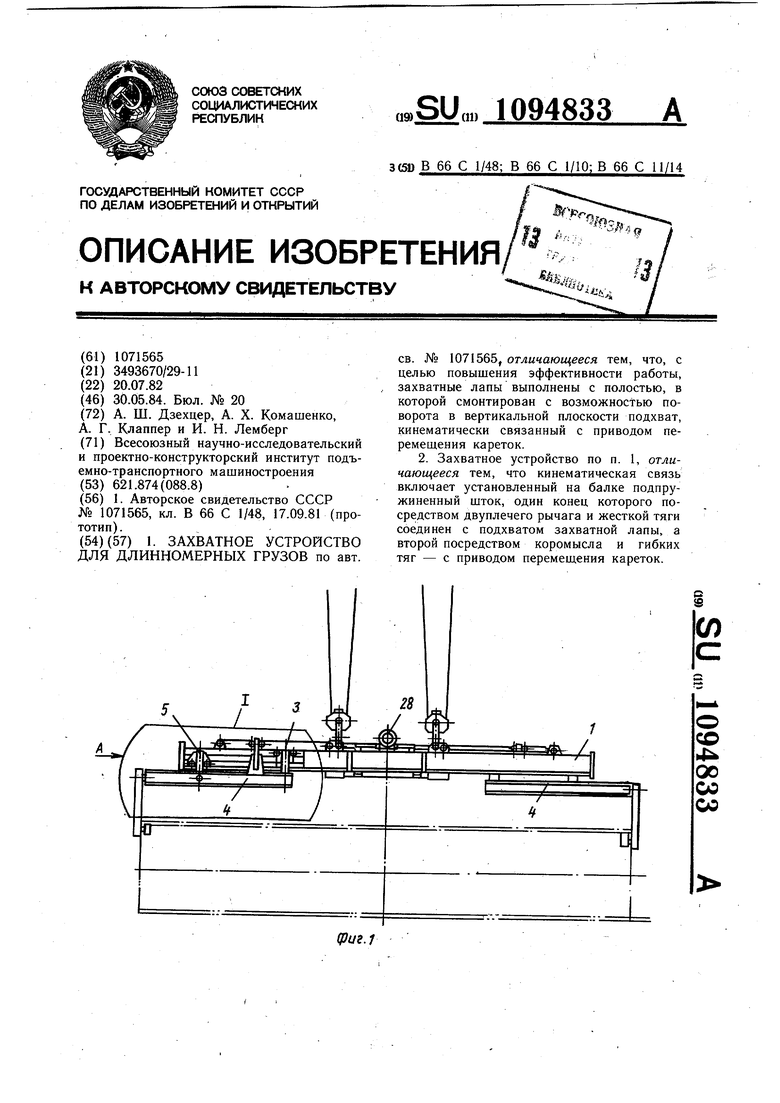
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
