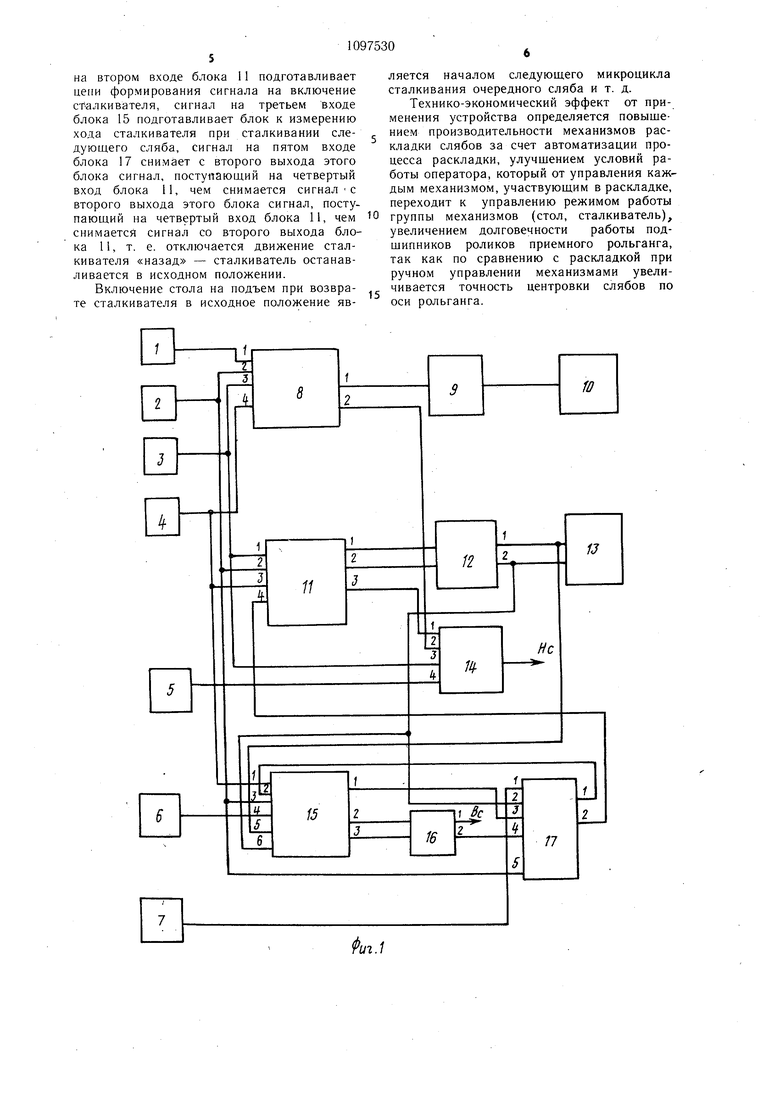
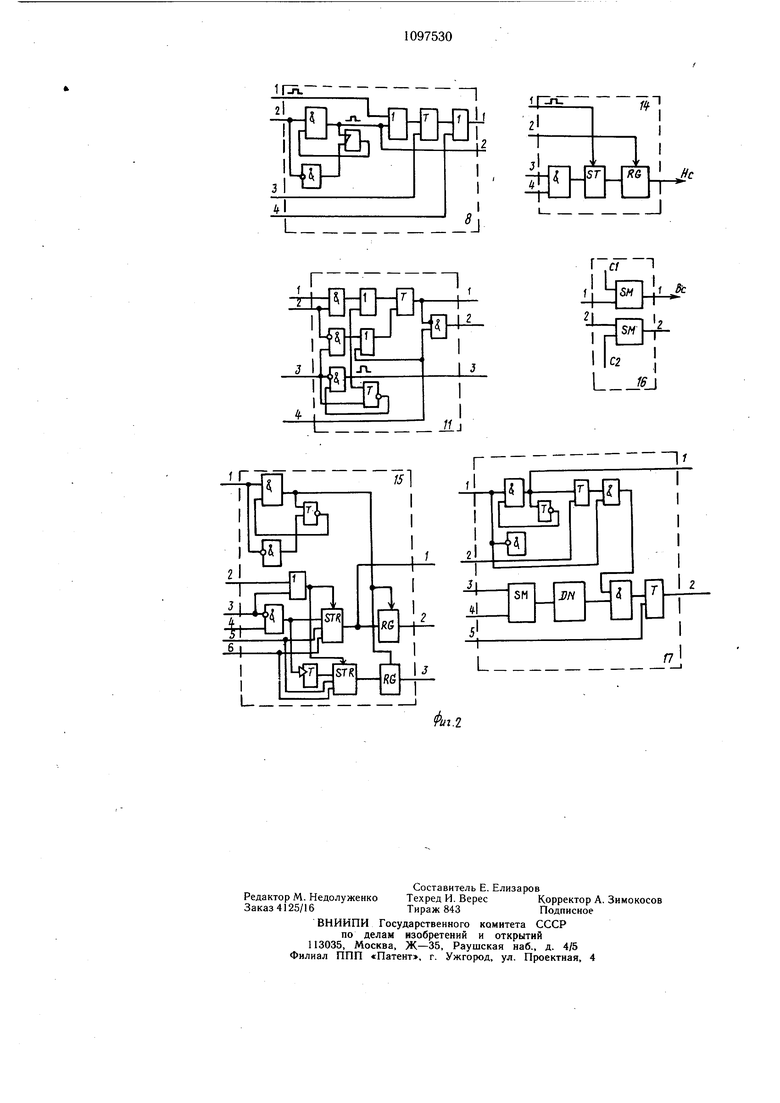
Изобретение относится к устройствам управления загрузочным столом и сталкигвателем слябов прокатных станов и может быть применено в металлургической промышленности. Известно устройство для управления загрузочным столом и сталкивателем слябов, содержащее фотодатчик, счетчик импульсов и блок управления сталкивателем I. Известно также устройство для управления загрузочным столом и сталкивателем слябов, содержащее датчик исходного положения сталкивателя, датчик фиксации верхней грани сталкиваемого сляба к рольгангу, соединенные с одними из входов блоков управления столом и сталкивателем, соединенными через исполнительные блоки соответственно с приводами стола и сталкивателя, и датчик перемещения стола 2. „„ Однако известные устройства характеризуются недостаточной точностью, в связи с чем отсутствует возможность автоматической укладки сляба на рольганг с центровкой его по оси рольганга. Целью изобретения является повышение точности работы устройства. Цель достигается тем, что устройство для управления загрузочным столом и сталкивателем слябов, содержащее датчик исходного положения сталкивателя, датчик фиксации верхней грани -верхнего сляба и датчик фиксации нижней грани сталкиваемого сляба к рольгангу, соединенные с одними из входов блоков управления столом и сталкивателем, подключенных через исполнительные блоки соответственно к приводам стола и сталкивателя, и датчик перемещения стола, снабжено блоком начала цикла, датчиком перемещения сталкивателя, датчиком начала укладки сляба на рольганг, блоко.м измерения высоты сляба, блоком измерения хода сталкивателя, блоком вычисления п.араметров хода сталкивателя и блоком позиционирования сталкивателя, причем блок формирования начала цикла соединен с одним из входов блока управления столом, датчик перемещения сталкивателя соединен с одним из входов блока измерения хода сталкивателя, другие входы которого соединены соответственно с одними из входов блока управления столом, блока позиционирования сталкивателя и привода сталкивателя, один из выходов блока измерения хода сталкивателя соединен с одним из входов блока позиционирования сталкивателя, а два других - с входами блока вычисления параметров хода сталкивателя, выход которого соединен с одним из входов блока позиционирования сталкивателя, один из выходов которого соединен с одним из входов блока управления сталкивателем. а другой - с одним из входов блока измерения хода сталкивателя, а датчик начала укладки сляба на рольганг соединен с одним из входов блока позиционирования сталкивателя. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - функциональные схемы отдельных блоков. Устройство содержит блок 1 формирования начала цикла, датчик 2 исходного положения сталкивателя, датчик 3 фиксации верхней грани верхнего сляба, датчик 4 фиксаций нижней грани сталкиваемого сляба, датчик 5 перемещения стола, датчик 6 перемещения сталкивателя, датчик 7 начала укладки сляба на рольганг, блок 8 управления, блок 9 включения стола, привод 10 стола, блок 11 управления сталкивателем, блок 12 включения сталкивателя, привод 13 сталкивателя, блок 14 измерения высоты сляба, блок 15 измерения хода сталкивателя, блок 16 вычисления параметров хода сталкивателя и блок 17 позиционирования сталкивателя. Схемное решение блоков 8, 11, 14-17 может быть различным в зависимости от принятой элементной базы. Блоки 9 и 12 представляют собой, например, соответственно нереверсивный и реверсивный магнитные пускатели с бесконтактными ключами их включения (фиг. 2). Устройство работает следующим образом. После укладки стопы слябов на стол загрузочный, оператор с помощью блока 1 подает команду на начало цикла раскладки слябов со стола на рольганг. При этом команда оператора поступает на вход один блока 8, на первом выходе которого появляется сигнал включения стола на подъем, по которому аппаратура 9 включает привод 10 - стол со стопвй слябов поднимается. При подъеме стола стопа слябов входит в зону видимости датчика 3, который срабатывает, подавая сигнал на третий вход блока 8, первый вход блока 11 и третий вход блока 14. При этом сигнал на третьем входе блока 8 снимает выходной сигнал с первого выхода этого блока, вследствие чего блок 9 отключает привод стола 10. Сигнал на первом входе блока 11 совместно с сигналом на втором входе этого блока, свидетельствующим о том, что сталкиватель находится в исходном положении, формируют на первом входе блока 11 сигнал включения сталкивателя «вперед (к рольгангу), который с помощью блока 12 включает привод 13 на движение «вперед. Сигнал на третьем входе блока 14 разрешает прохождение импульсов от датчика 5 на счет высоты сляба так, что отсчет высоты сляба начинается с момента затемнения датчика 3. Включившись, сталкиватель выходит из исходного положения, датчик 2 снимает свой сигнал с второго входа блока 8, второго входа блока 11, третьего входа блока 15 и пятого входа блока 17. При этом исчезновение сигнала с второго входа блока 8 подготавливает цепи автоматического включения стола на подъем при возврате сталкивателя в исходное положение после укладки на рольганг очередного сляба, исчезновение с второго входа блока 11 подготавливает цепи отключения сталкивателя, которое произойдет после затемнения сталкиваемым слябом датчика 4, исчезновение сигнала с третьего входа блока 15 разрешает прохождение сигналов от датчика б, начиная тем самым отсчет пути LCT, проходимого сталкивателем, и половины этого пути 0,5 Lt-r, исчезновение сигнала с пятого входа блока 17 подготавливает включение позиционирования сталкивателя. Сталкиватель идет «вперед, входит в соприкосновение с верхним слябом стопы и толкает его к рольгангу. В момент затемнения сталкиваемым слябом фотодатчика 4 последний срабатывает и подает свой выходной сигнал на четвертый вход блока 8, третий вход блока 11 и первого блока 15. При этом сигнал на четвертом входе 4 блока 8 формирует на его первом выходе сигнал включения стола на подъем, который отрабатывается блоком 9, включающим привод 10, сигнал на третьем входе блока 11 подготавливает формирование сигнала на третьем выходе блока, которое произойдет при исчезновении сигнала датчика 4, и снимает сигнал с первого выхода блока 11, что приводит к останову сталкивателя; сигнал на первом входе блока 15 формирует команду на фиксацию отсчета и 0,5L|;;v в момент срабатывания датчика 4. Второй выход блока 15 подает в блок 16 величину Lcr, а на первом выходе блока 16 появляется информация о ширине сляба Вс Ci-LtT, необходимая для других механизмов стана. С третьего выхода блока 15 в блок 16 поступает величина 0,5LcT, а на его втором выходе 2 дается установка Lf позиционирования сталкивателя, которая ч,ерез четвертый вход вводится в блок 17, константы С и С в блоке 16 устанавливаются при наладке системы. Стол со стопой слябов поднимается до гех пор, пока нижняя грань сталкиваемого сляба не выйдет из зоны действия датчика 4. Датчик 4 снимает сигнал со своего выхода, т. е. снимает сигнал с четвертого входа блока 8, третьего входа блока 11 и первого входа блока 15. При этом исчезновение сигнала с четвертого входа блока 8 приводит к исчезновению сигнала на выходе этого блока - привод стола отключается, стол останавливается, исчезновение сигнала с третьего входа блока 11 формирует сигнал на первом и третьем выходах этого блока - по сигналу с первого выхода происходит включение сталкивателя «вперед а по сигналу с третьего выхода, который подается на первый вход блока 14, происходит фиксация высоты сляба Не для передачи этой информации в другие системы стана, исчезновение сигна ла с первого входа блока 15 подготавливает цепи фиксации значений Ltt 0,5LeV для следующего сталкиваемого сляба. Сталкиватель идет «вперед проталкивая сляб к рольгангу. На третий вход блока 17 подается с первого выхода блока 15 какая-то информация о величине хода сталкивателя, на четвертый вход блока 17 подается с второго выхода блока 16 уставка позиционирования , однако до срабатывания датчика 7 позиционирование отключено. При срабатывании датчика 7 подается сигнал на первый вход блока 17, что приводит к появлению на первом выходе блока 17 импульсного сигнала, который подается на второй вход блока 15 и является командой на начало отсчета пути, проходимого сталкивателем с .момента срабатывания датчика 7. Величина этого пути в виде сигнала на первом выходе блока 15 поступает на третий вход блока 17. Когда пройденный сталкивателем от момента срабатывания датчика 7 путь станет равным или превысит уставку позиционирования сталкивателя, на втором выходе блока 17 появляется сигнал, .который через четвертый вход поступает на блок II, снимая сигнал с первого выхода блока 11 и формируя сигнал на его втором выходе. Происходит реверс привода 13. Одновременно с реверсированием привода 13, сигнал с второго выхода блока II поступает на второй вход блока 17 и отключает позиционирование сталкивателя. При возврате сталкивателя в ис.ходное положение исчезает сигнал на выходе датчика 7, т. е. с первого входа блока 17, что подготавливает включение позиционирования следующего сляба. Дальнейшее продвижение сталкивателя вызывает срабатывание датчика 2, с выхода которого сигнал подается на второй вход блока 8, второй вход блока 11, третий вход блока 15 и пятый вход блока 17. При этом сигнал на втором входе блока 8 вызывает появление импульсного сигнала на втором выходе блока 8, который поступает на второй вход блока 14 и подготавливает его к отсчету высоты следующего сляба, и сигнала на первом выходе блока 8,, который включает привод 10. Сигнал на втором входе блока 11 подготавливает цени формирования сигнала на включение сГалкивателя, сигнал на третьем входе блока 15 подготавливает блок к измерению хода сталкивателя при сталкивании следующего сляба. Сигнал на пятом входе блока 17 снимает с второго выхода этого блока сигнал, поступающий на четвертый вход блока 11, чем снимается сигнал с второго выхода этого блока сигнал, поступающий на четвертый вход блока И, чем снимается сигнал со второго выхода блока 11, т. е. отключается движение сталкивателя «назад - сталкиватель останавливается в исходном положении. Включение стола на подъем при возврате сталкивателя в исходное положение является началом следующего микроцикла сталкивания очередного сляба и т. д. Технико-экономический эффект от применения устройства определяется повыщением производительности механизмов раскладки слябов за счет автоматизации процесса раскладки, улучшением условий работы оператора, который от управления каждым механизмом, участвующим в раскладке, переходит к управлению режимом работы группы механизмов (стол, сталкиватель), увеличением долговечности работы подшипников роликов приемного рольганга, так как по сравнению с раскладкой при ручном управлении механизмами увеличивается точность центровки слябов по оси рольганга.
i
friJir
n
жда.
12Т
Jc
I
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ, ОБЖИГОВАЯ МНОГОЩЕЛЕВАЯ ШАХТНАЯ ПЕЧЬ ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ И СУШИЛЬНАЯ КАМЕРА ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 1993 |
|
RU2046708C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ СТОЛА-РАСКЛАДЧИКА СЛЯБОВ | 1970 |
|
SU281387A1 |
| Устройство автоматического управления сталкивателем слитков на приемный рольганг | 1976 |
|
SU567518A1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| Устройство для управления загрузкой и перемещением заготовок в нагревательной печи | 1982 |
|
SU1054651A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| ЗАЧИСТКИ СЛЯБОВM^.-JV!«-^ -.• | 1971 |
|
SU304023A1 |
| Устройство для штабелирования прямоугольных заготовок,преимущественно, слябов | 1973 |
|
SU499195A1 |
| Поточная линия | 1975 |
|
SU590142A1 |
| Установка для упаковки консервов в металлических банках | 1986 |
|
SU1375511A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАГРУЗОЧНЫМ СТОЛОМ И СТАЛКИВАТЕЛЕМ СЛЯБОВ, содержащее датчик исходного положения сталкивателя, датчик фиксации верхней грани верхнего сляба и датчик фиксации нижней грани сталкиваемого сляба к рольгангу, соединенные с одними из входов блоков управления столом и сталкивателем, подключенных через блоки включения стола и сталкивателя соответственно к приводам стола и сталкивателя, и датчик nepeMeiiiennH стола, отличающееся тем, что, с целью повышения точности, оно снабжено блоком начала цикла, датчиком перемеш,ения сталкивателя, датчиком начала укладки сляба на рольганг, блоком измерения высоты сляба, блоком измерения хода сталкивателя, блоком вычисления параметров хода сталкивателя и блоком позиционирования сталкивателя, причем блок формирования начала цикла соединен с одним из входов блока управления столом, датчик перемещения сталкивателя соединен с одним из входов блока измерения хода сталкивателя, другие входы которого соединены соответственно с одними из входов блока управления столом, блока позиционирования сталi кивателя и привода сталкивателя, один из выходов блока измерения хода сталкива(Л теля соединен с одним из входов блока позиционирования сталкивателя, а два дру гих - с входами блока вычисления параметров хода сталкивателя, выход которого соединен с одним из входов блока позиционирования сталкивателя, один из выходов которого соединен с одним из входов блока управления сталкивателем, другой - с од ним из входов блока измерения хода сталсо кивателя, а датчик начала укладки сляба на рольганге соединен с одним из входов ел блока позиционирования сталкивателя. со
f &
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стефанович В | |||
| Л | |||
| Автоматизация непрерывных и полунепрерывных широкополосных станов горячей прокатки | |||
| М., «Металлургия, 1975, с | |||
| Гидравлическая или пневматическая передача | 0 |
|
SU208A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сталкиватель слябов | |||
| Стол загрузочный | |||
| Способ изготовления масс из растительных и животных волокнистых материалов | 1923 |
|
SU3062A1 |
| Пояснительные записки НИИТЯЖМАШ НПО Новокраматорский машиностроительный завод, 1975-1976 (прототип). | |||
