1
Изобретение относится к дистанционным манипуляторам, управляемым оператором пу тем формирования задающих сигналов и мо«ет быть использовано в машиностроении.
Известны устройства для управления ма нипулятором, содержащие задающий орган, кинематически подобный исполнительному механизму манипулятора. Сигналы,снимаемые с потенциометрических датчиков задающего органа, преобразуются системой следящих приводов в перемещение исполнительного механизма манипулятора.
Наиболее близкой по техническому решению к данному изобретению является устройство для управления манипулятором, содёрк. жащее последовательно соединенные задаю щий орган, вычислительное устройство, блок интеграторов, блок следящих приводов и исполнительный Механизм 2j.
Однако при работе в ограниченной зоне возможны удары звеньев исполнительного механизма об ограничительные упоры, что снижает надежность манипулятора и создает акустические шумы. Существенным недостатком является и проявление дрейфа усилятв лей. В результате чего при отсутствии управляющих воздействий со стороны оператора звенья манипулятора могут перемещаться с некоторой скоростью. Оператор должен непрерывно удерживать манипулятор в положении удобном для проведения работы. При этом от него требуется повышенное внимание, что существенно увеличивает его утомляемость, снижает точность выполнения рабочих операций.
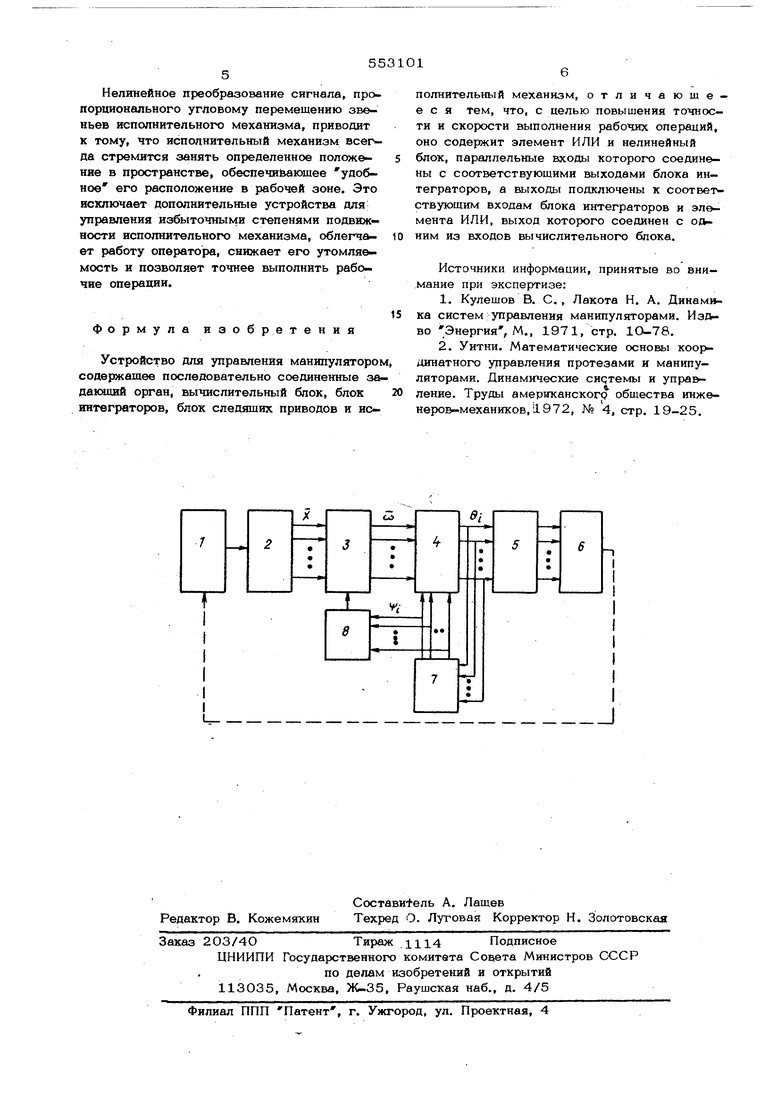
Кроме того, в указанной системе упра&ления применяется задающий орган, не являющийся кинематически подобным исполнитель ному механизму. Поэтому.при большом количестве степеней подвижности исполнительного механизма возникает проблема управления избыточными степенями подвижности, не управляемыми от одного задающего органа. Требуются дополнительные устройства для управления этими степенями подвижности. Все это затрудняет работу оператора, требует повыщенного внимания, снижает точность и скорость .манипулирования. Целью изобретения является повышение точности и скорости выполнения рабочих опе раций. , Для этого система управления манипул5 тором содержит элемент ИЛИ и нелинейный блок, параллельные входы которого соединены, с со.огВ8тствующимн выходами блока интеграторов, а выходы подключены к сос/гвет ствуюшим входам блока интеграторов и элемента ИЛИ, выход которого соединен содни из входов вычислительного блока. На чертеже приведена блок-схема устрой ства Для управления манипулятором. Устройство для управления манипуляторо содержит пульт оператора 1, задающий орм ган 2, вычислительный блок 3, блок интеграторов 4, блок следящих приводов 5, испол нительный механизм 6, нелинейный блок 7, элемент ИЛИ 8. Устройство для управления манипуляторо работает следующим образом. ..Оператор при помоши задакндего органа 2, кинематически не подобного исполнительному механизму манипулятора, задает пер&мещение. С задающего органа снимаются сигналы, пропорциональные этим перемещениям и подаются на вычислительный блок 3 Вычислительный блок 3 преобразует сигналы с задающего органа в соответствующие сигналы, пропорциональные скорости пе ремещения звеньев исполнительного меха- низма, либо в сигналы, пропорциональные перемещению звеньев исполнительного механизма. При управлении скоростью перемещения звеньев исполнительного механизма 6 Ы51числительный блок 3 реализует алгоритм:/ 1 ЩгдёЛ5- вектор скорости перемещения звенье исполнительного механизма, 1 - Якобиан преобразований, 9 - угловые перемещения звеньев испол . нительного механизма;. 1 - .индекс звена исполнительного меха низма, . X - вектор перемещений задающего органа. При управлении перемещением исполнительного механизма 6 вычислительный блок 3 реализует алгоритм: )(2) .: в . .гдёб1 - вектсщ гловых перемещений исполнительного механиэма Л пределах малых углов перемещений можно принять, что Якобиан 1 (Q не зависит от б j , тогда вычио;}ительный блок 3 реализует алгоритм: Q-ro.yx(3) По сигналу элемента ИЛИ 8 в вычислительном блоке 3 производится переключение с одного алгоритма на другЬй. Переключение с алгоритма (2) или (З) на алго-; ритм (1) осуществляется со значением сигналов 0, соответствующих моменту переключения. Блок интеграторов 4 интегрируют сигналы, поступающие с вычислительного блока о и с нелинейного блока 7. Сигналы с нелинейного блока 7 поступают на входы блока интеграторов 4 как-отрицательная обратная связь. Система слеД5Пдих приводов 5 преобразует вь1ходнь1е сигналы ёлока интеграторов 4 в соответствующие перемещения звеньев нополнительного механизма 6. Нелинейный блок 7 осуществляет нелинейное 1преобразование сигнала пропорционально угловому перемещению звеньев испол- нительного механизма &0 таким образом, что в пределах некоторой зоны изменения.9 выходной сигнал с нелинейного|преобразователя Vij либо не зависит от 0 , либо эта зави. симость проявляется слабо. Sa пределами этой зоны зависимость междуУ и Q cymeci венна и, с увеличением 0 эта зависимость может проявиться более сильно., Взаимосвязь между V и Qj может быть выражена, например, кубической параболой: i-KiCQi-Oior, где V| - выходной сигнал нелинейного про образователя;; коэффициент; Q. - исходное положение 1 -го звена . исполнительного механизма, обеопечивающее удобное его распело жение в рабочей зоне при отсутствии задающего сигнала оператора. Другим примером реализации зависимости между Vj и0- может быть известный способ построения кусочно-линейных футошональных преобразований сигналов. &1ходные сигналы нелинейного блока 7 поступают в виде от- рицательных обратных связей на соответст вующие входы блока интеграторов 4, а также на элемент ИЛИ 8. . Элемент ИЛИ подает сигнал на вход вычислительного блока 3 для переключения с одного алгоритма на другой по сигналу одного из входов, в котором сигнал превысит пороговое значение, соответствующее границе рабочей зоны манипулятора. Нелинейное преобразование снгнала, пропорционального угловому перемещению звеньев исполнительного механизма, приводит к тому, что исполнительный механизм всегда стремится занять определенное положение в пространстве, обеспечивающее удо ное его расположение в рабочей зоне. Это исключает дополнительные устройства для управления избыточными степенями подвижности исполнительного механизма, облегчает работу оператора, снижает его утомляемость и позволяет точнее выполнить рабочие операции. Формула изобретения Устройство для управления манипуляторо содержащее последовательно соединенные за дакший орган, вычислительный блок, блок интеграторов, блок следящих приводов и исполнительный механизм, отличающееся тем, что, с целью повышения точности и скорости выполнения рабочих операций, оно содержит элемент ИЛИ и нелинейный блок, параллельные входы которого соединены с соответствующими выходами блока интеграторов, а выходы подключены к соответ ствующим входам блока интеграторов и элемента ИЛИ, выход которого соединен с из входов вычислительного блока. Источники информации, принятые во внимание при экспертизе: 1.Кулешов В. С., Лакота Н. А. Динамика систем управления манипуляторами. Из№во Энергия, М., 1971, стр. 1О-78. 2.Уитни. Математические основы коорьдинатного управления протезами и манипуляторами. Динамические системы и управление. Труды американского общества инженеров-механиков, 1972, № 4, стр. 19-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Систма управления дистанционным манипулятором | 1976 |
|
SU633725A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
| УСТРОЙСТВО ТРАЕКТОРНОГО, ОПТИМАЛЬНОГО ПО БЫСТРОДЕЙСТВИЮ УПРАВЛЕНИЯ МАНИПУЛЯЦИОННЫМ РОБОТОМ | 2000 |
|
RU2199775C2 |
| Устройство для управления манипулятором | 1989 |
|
SU1668128A1 |
| Устройство для позиционно-скоростного управления манипулятором | 1981 |
|
SU991366A1 |
| Система управления манипулятором | 1977 |
|
SU642671A1 |
| Система управления манипулятором | 1978 |
|
SU729545A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Устройство для управления манипулятором по вектору скорости | 1989 |
|
SU1705803A1 |
| Устройство для управления астатическим манипулятором | 1982 |
|
SU1037206A1 |
