6 и 12 гI I I
I / I I,,1.,
I / IfT i/i /J
; zh±-y- -j:- i -4 x«(;
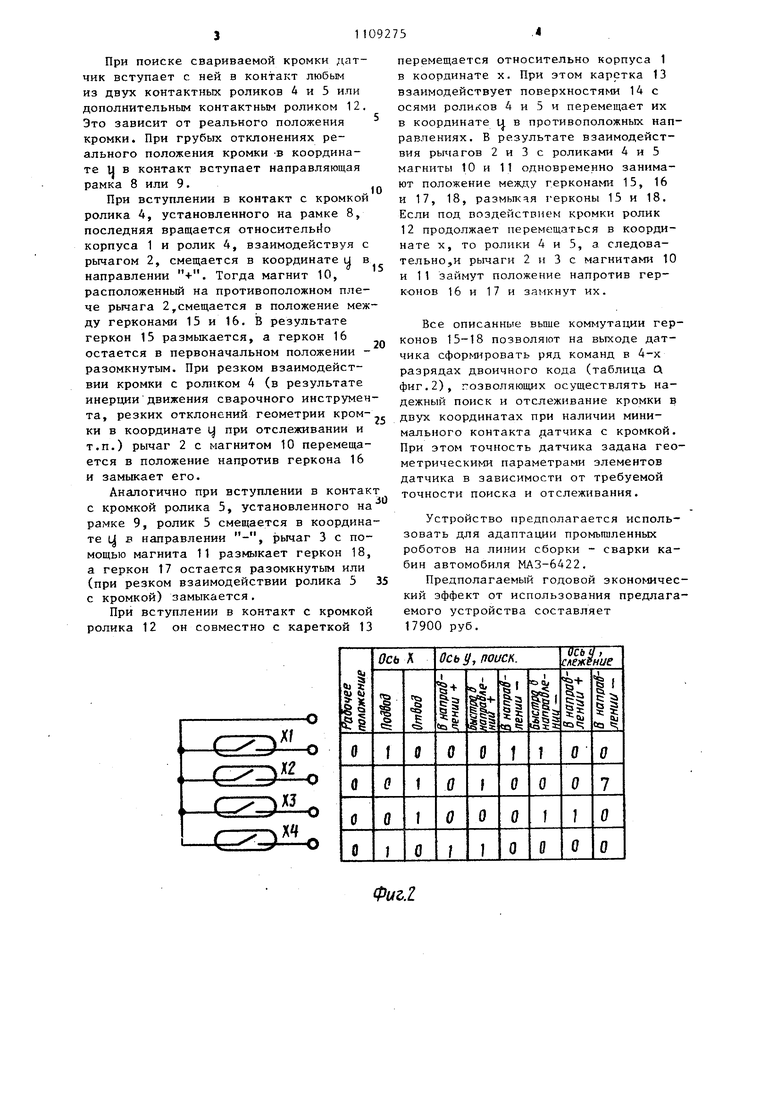
f в а (v) Изобретение относится к сварочном производству, в частности к устройст вам для определения положения и отслеживания кромки свариваемого изделия, и может быть использовано при контактной точечной сварке, например с помощью промьшшенного робота. Наиболее близким к изобретению яв ляется датчик положения кромки свари ваемого изделия, содержащий корпус, смонтированные на нем подпружиненные рычаги, связанные с коммутируюпщм устройством, контактные элементы С1. Недостатком известного датчика яв ляется невысокая точность слежения за кромкой невозможности отслеживания за смещением свариваемых кромок в направлении второй координа ты. Целью изобретения является повьше ние точности при слежении за стыком путем обеспечения возможности отслеживания за изменением положения свариваемой кромки по второй координате . Поставленная цель достигается тем что датчик положения и отслеживания кромки свариваемого изделия, содержа щий корпус, смонтированные на нем подпружиненные рычаги, связанные с коммутирующим устройством, и контакт ные элементы, снабжен двумя щарнирно соединенными под углом рамками, смонтированными с возможностью поворота вокруг закрепленной в корпусе оси кареткой, расположенной в корпусе с возможностью перемещения вдоль его оси между коммутирующим устройст вом и контактными элементами, которы выполнены в виде роликов, взаимодействующих своими осями с профильными поверхностями каретки и дополнительным контактным роликом, смонтированным на каретке посредством оси, установленной перпендикулярно осям вра щения упомянутых контактных роликов, оси которых установлены в рамках, при этой каждьй подпружиненный рычаг установлен с возможностью взаимодействия одним своим концом с одним из контактных роликов, а другим концом с коммутирующим устройством. Кроме того, профиль поверхностей каретки, взаимодействующих с осями контактных роликов, выполнен тангенсоидальньм. На фиг.1 изображен датчик, общий вид; на фиг.2 - электрическая схема и таблица выходных сигналов; на фиг.З - датчик, .вид в изометрии. В корпусе 1, жестко закрепленном на сварочном инструменте,установлены подпружиненные рычаги 2 и 3. Между меньшими плечами рычагов 2 и 3 расположены взаимодействующие с ними контактные ролики 4 и 5, оси которых 6 и 7 установлены в рамках 8 и 9, шарнирно закрепленных под углом друг к другу на корпусе 1. На противоположных плечах рычагов 2 и 3 установлены постоянные магниты 10 и 11. Дополнительный контактный ролик 12 с осью вращения, перпендикулярной осям вращения роликов 4 и 5 установлен в каретке 13, сопряженной поверхностями 14 с осями 6 и 7 роликов 4 и 5. Каждый из постоянных магнитов 10 и 11 воздействует на коммутирующие устройства, например герконов 15-18. При этом расстояние между ними выбрано таким образом, что для каждого рычага 2 и 3 существует промежуточное положение, при котором магниты 10 и 11 не воздействуют ни на один из соответствующих им герконов 15-18. Величина этого расстояния равна полю допуска на положение сварочного инструмента относительно кромки в координате у , умноженному на отношение длин плеч рычагов 2 и 3. Начальный угол между рамками 8 и 9 выбирается таким образом, чтобы отношение величины перемещения ролика 12 к величинам перемещений роликов 4 и 5 всегда оставалось постоянным. Это требование выполняется при углах 90, если профиль поверхностей 14 выполнить тангенсоидальным в функции текущего угла между направляющими рамками 8 и 9. Для предотвращения возможных угловых отклонений оси ролика 12, влияющих на точность и надежность датчика, каретка 13 может быть дополнительно сопряжена своими внешними поверхностями с отверстием в корпусе 1 с возможностью перемещения вдоль оси датчика. Работа датчика связана с основными движениями руки робота: поиск свариваемой кромки и отслеживание кромки в процессе сварки. До вступления датчика в контакт с кромкой ролики 4 и 5 расположены симметрично относительно его оси, герконы 15 и 18 замкнуты, а герконы 16 и 17 разомкнуты. При поиске свариваемой кромки датчик вступает с ней в контакт любым из двух контактных роликов А и 5 или дополнительным контактным роликом 12. Это зависит от реального положения кромки. При грубых отклонениях реального положения кромки -в координате U в контакт вступает направляющая рамка 8 или 9. При вступлении в контакт с кромкой ролика А, установленного на рамке 8, последняя вращается относительйо корпуса 1 и ролик 4, взаимодействуя с рычагом 2, смещается в координате U в направлении +. Тогда магнит 10, расположенный на противоположном плече рычага 2,смещается в положение меж ду герконами 15 и 16. В результате геркон 15 размыкается, а геркон 16 остается в первоначальном положении разомкнутым. При резком взаимодействии кромки с роликом 4 (в результате инерциидвижения сварочного инструмен та, резких отклонений геометрии кромки в координате 1 при отслеживании и т.п.) рычаг 2 с магнитом 10 перемещается в положение напротив геркона 16 и замыкает его. Аналогично при вступлении в контак с кромкой ролика 5, установленного на рамке 9, ролик 5 смещается в координа те L в направлении -, рычаг 3 с помощью магнита 11 размыкает геркон 18, а геркон 17 остается разомкнутым или (при резком взаимодействии ролика 5 с кромкой) замыкается, При вступлении в контакт с кромкой ролика 12 он совместно с кареткой 13 перемещается относительно корпуса 1 в координате х. При этом каретка 13 взаимодействует поверхностями 14 с осями роликов 4 и 5 и перемещает их в координате 1 в противоположных направлениях. В результате взаимодействия рычагов 2 и 3 с роликами 4 и 5 магниты 10 и 11 одновременно занимают положение между герконами 15, 16 и 17, 18, размыкая герконы 15 и 18. Если под воздействием кромки ролик 12 продолжает перемещаться в координате X, то ролики 4 и 5, а следовательно,и рычаги 2 и 3 с магнитами 10 и 11 займут положение напротив герконов 16 и 17 и замкнут их. Все описанные выше коммутации герконов 15-18 позволяют на выходе датчика cфop Dгpoвaть ряд команд в 4-х разрядах двоичного кода (таблица СИ фиг.2), позволяющих осуществлять надежный поиск и отслеживание кромки в двух координатах при наличии минимального контакта датчика с кромкой. При этом точность датчика задана геометрическими параметрами элементов датчика в зависимости от требуемой точности поиска и отслеживания. Устройство предполагается использовать для адаптации промьпиленных роботов на линии сборки - сварки кабин автомобиля МАЗ-6422. Предполагаемый годовой экономический эффект от использования предлагаемого устройства составляет 17900 руб.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик системы управления клещами для контактной точечной сварки | 1982 |
|
SU1109287A1 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| Сварочная головка для многопроходнойСВАРКи глубОКиХ РАздЕлОК | 1979 |
|
SU841838A1 |
| ДАТЧИК СИСТЕМЫ УПРАВЛЕНИЯ КЛЕЩАМИ ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ ОТБОРТОВОК ПЕРЕМЕННОЙ ШИРИНЫ | 2001 |
|
RU2218253C2 |
| Робот для контактной точечной сварки | 1985 |
|
SU1258654A1 |
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
| Автоматизированная поточная линия для изготовления сварных конструкций | 1991 |
|
SU1784430A1 |
| С-ОБРАЗНЫЕ ШТОКОВЫЕ КЛЕЩИ ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ ЭЛЕКТРОСВАРКИ, ВСТРОЕННЫЕ В РОБОТ | 2001 |
|
RU2221681C2 |
| Стан для сварки особотонкостенных спиральношовных труб | 1982 |
|
SU1097408A1 |
| Устройство для контроля и сортировки магнитов | 1987 |
|
SU1443979A1 |

1. ДАТЧИК ПОЛОЖЕНИЯ КРОМКИ СВАРИВАЕМОГО ИЗДЕЛИЯ, содержащий корпус, смонтированные на нем подпружиненные рычаги, связанные с коммутирующим устройством, и контактные элементы, отличающийся тем, что, с целью повышения точности при слежении за стыком путем обеспечения возможности отслеживания за изменением положения свариваемой кромки по второй координате, датчик снабжен двумя шарнирно соединенными под углом рамками, смонтированными с возможностью поворота вокруг закрепленной в корпусе оси, кареткой, расположенной в корпусе с возможностью перемещения вдоль его оси между коммутирующим устройством и контактными элементами, которые вьтолнены в виде роликов, взаимодействующих своими осями с профильными поверхностями каретки, и дополнительным контактным роликом, смонтированным на каретке посредством оси, установленной перпендикулярно осям вращения упомянутых контактных роликов, оси которых установлены в рамках, при этом каждый подпружиненный рычаг установлен с возможностью § взаимодействия одним своим концом с одним из контактных роликов,а другим (Л концом - с коммутируюощм устройством. с 2. Датчик поп.1,отличающ и и с я тем, что профиль поверхносS тей каретки, взаимодействующих с осями контактных роликов, выполнен тангенсоид альным.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 228189, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
