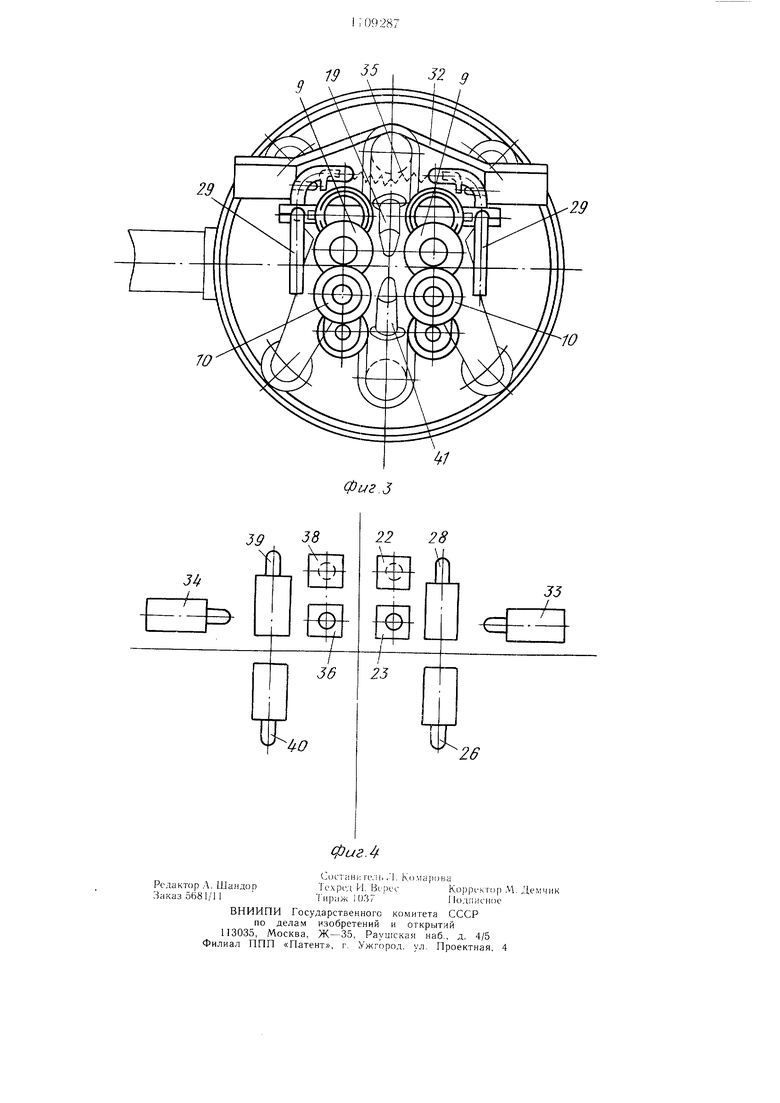
Изобретение относится к сварке и может найти применение нри контактной сварке фланцевых швов. Известен датчик системы управления клещами для контактной точечной сварки, содержащий установленный на рычагах клещей корпус и размещенные на нем по обе стороны от рычагов щупы 1. Однако датчик не может быть использован при сварке фланцевых щвов в проемах окон и дверей кузова, а также щвов, соединяющих крыщу с каркасом кузова и других подобных соединений. Датчик подключен к программному устройству, чтобы компенсировать реальные неточности положения общей оси электродов от нормали к поверхности двоякой кривизны, а также для выдержки расстояния от стрингера до ряда сварных точек, но размер щага между точками обеспечивается программным устройством, которое составляет значительную долю стоимости робота. Известный датчик не обеспечивает безопасного для электродов и изделия подвода клещей к свариваемой кромке фланца. Целью изобретения является упрощение программирования движений клещей путем обеспечения слежения по кро.мке фланца свариваемого изделия. Поставленная цель достигается тем, что датчик системы управления клещами для контактной точечной сварки, содержащий установленный на рычагах клещей корпус и размещенные на нем по обе стороны от рычагов щупы, снабже.ч закрепленными на корпусе скобой и рычагом с регулируемыми упорами, взаимодействующими с системой управления, корпус выполнен в виде двух пар щарнирно связанных между собой и взаимно подпружиненных клещевин, установленных с возможностью качательного движения вдоль оси рычагов, при этом на одной из клещевин закреплена скоба, а на другой -- рычаг, а 1цупы выполнены в виде пары роликов, каждый из которых установлен на соответствующей клеплевине. При это.м один ролик пары выполнен в виде полус(}1еры с ребордой, а другой - в виде усеченпого Konvea, обращепного большим основанием к pe6op;ie первого ролика. На фи1 показап датч1 к в разрезе, вид сбоку; на фиг. 2 - вид датчика в плане; на фиг. , -- то же, вид спереди; на фиг. 4 -схема размещения на клещах датчиков копечных переключателей. Корпус датчика выполнен в виде клещевин 1 и 2, установленных на оси 3. Клещевины связаны между собой пружиной 4 и выполнены с полостями, в которых устапонлены одним концом ииноли 5 и 6, другие ксщцы пинолей жестко связаны с держателями 7 и 8, несущими установленные на осях главный щуп 9 и вспомогательный щун 10, выполненные в виде пары роликов. Щуп 9 представляет собой no.iyc;hepy с ребордой. а щуп 10 - усеченный конус, обращенный больщим основанием к реборде полусферы. Держатель 7, несущий ось главного щупа 9, соединен осью 11 с пинолью 5. В пинолях 5 и 6 и по.юстях клещевин 1 и 2 расположены соответственно стержни 12 и 13. Между ;ильзами пииолей и стержнями раз.мещены нружины 14 и 15. Стержень 12 выведен из клеихевины I для присое.аинения к скобе 16 при помощи гаек 17 и 18. Ось главного щупа 9 в держателе 7 служит для обеспечения его вращения, а ось 11 в 5 служит для самоустановки реборды главного щупа при движении вдоль искривленной свариваемой кромки. Пружиной 14 весь узел главного щупа подан влево до упора в клещевину 1 i-айкой 17, которой можно отрегулировать это выдвижение за электроды 19 сварочных клещей настолько, чтобы при поперечной подаче сварочных клещей к фланцу щупы успели войти в контакт с ним и предупредить возможпый удар одного из электродов о свариваемую кромку, что обеспечено качание.м клещевины 1 относительно оси 3 ее качания (и качап1 я щупа), которая не совпадает с осью качания рычагов сварочных клещей. На скобе 16 имеются регулируемые упоры 20 и 21. Упором 20 прижат щток датчика 22, а упором 21 отпущен с заданным зазоро.м UJTOK датчика 23. Оба датчика закреплены на к.псщевинах 1. На клещевине 2 закреплен рычаг 24, несущий регулируемый упор 25, взаимодействующий с датчиком 26. В клещевину 1 ввернут упор 27, воздействующий на датчик 28. Кроме главных щупов, датчик имеет предохранительнь е п;упы 29, соединенные с иинолями главных щупов клем.мовыми хомута.ми 30 и осями 31. Отогнутая часть стержня каждого щупа 29 выведена под кронщтейн 32 с закрепленными на нем датчиками 33 и 34. В исходное положение предохранительные щупы сведены пружиной 35. Таким образом, на клещах расположены парные датчики положения щупов, вьнюлняющие функции конечных переключателей. Датчики 23 и 36, чувствительные к неперпендикулярности гироскопической оси 37 Bpaiii.einiH клещей к касательной .искривления кромки сваривае.мого ф:1анца {внутренне: о обвода) кинематически связаны с осеным ходом главных щупов - ро,1пк(.)в 9 в пагфав.-гении от фронта работ, Датчики 22 и 38, чувствите.тьпые к от1, хустиию свариваемого фланца или к исг);вле11пю ei4) внешнего обвода, кинематически связанЬ1 с осевым ходом главных щуlof i; иаправ.лении к фронту работы. Датчики 33 и 34, предохраняющие клещи от столкновения с резкими изгибами и чувстЕигге/ьные к плавному из1иб внутреннего обвода свариваемого фланца, кинематически свягзаны с ходом предохранительных щупов к плоскости клещей. Датчик 28 и 39, чувствительные к изглбам фланца в направлении оси верхнего электрода 19 клещей, кинематически связаны с качательным движением клещевин 1 от радиального хода главных щупов - роликов 9 в плоскости, параллельной плоскости клещей. Датчики 26 и 40, чувствительные к тем же гофра.м и изгибам фланца в направлении оси нижнего электрода 41 клещей, кинематически связаны с качательным движением клещевины 2 и рычагов 24, присоединенных к пинолям 6 вспомогательных щупов - роликов 10. Датчик работает следующим образом. Когда клещи подводят к свариваемому фланцу (поперек кромки), то вероятны три возможных случая: фланец оказывается посредине зазора между электрода.ми; фланец наталкивается на верхний электрод; фланец наталкивается на нижний электрод. В первом случае качание клещевин 1 и 2 не происходит. Реборды главных щупов упираются в кромку, а клещи продолжают поперечную подачу, пока пиноль b не упрется в дно клещевины 1, т.е. по отношению к свариваемой кромке электроды займут заданное положение (заранее налаженное подкручиванием гаек 17 и 18). Вспомогательный щуп 10 также беспрепятственно займет свое положение против главного щупа за плоскостью фланца. Это положение упора в дно клещевины 1 воспринимается датчиком 23 как механический сигнал для выдачи команды на начало сварки первой точки и на изменение подачи клещей с поперечной подачи на продольную. Во втором случае, когда создается угроза столкновения вер.хнего электрода с фланцем, главный щуп своей сферой приподнимается относительно первоначального положения, заставляя покачнуться клещевину I относительно оси 3. Это воспринимается датчиком 28 как механический сигнал для выдачи команды на поправочный ход привода подъема сварочных клещей во время поперечной подачи, пока не исчезнет команда «Сигнал от датчика 28. В третьем случае произойдет то же с датчиком 26 и будет поправочный ход привода на опускание клещей. Предусмотрен и четвертый случай, когда одновременно и главный, и предохранительный щупы могут сделать качательное движение. Это проис.ходит тогда, когда прихваточные сварные точки поставлены на фланце редко и кромки разошлись больп1е зазора .между электродами, т.е. может произойти столкновение и с верхним и с нижним электродами. В этом случае к системе управления проходят команды сразу от обоих датчиков 28 и 26, что приводит к включению привода дополнительного раскрытия зазора сварочных клещей во время поперечной подачи. Во время рабочей (продольной) подачи при сварке фланца П1упы механически сигналят своим датчиком о необходимости корректировки траектории подачи электродов кле1цей. Таким образом, осуществляется слежение за свариваемой кромкой, что делает ненужным программирование движений робота, упрощает привод подач и систему управления, а главное избавляет робот от ненужных ходов, когда в его пространстве реальное изделие имеет размеры, меняющиеся незапрограммированным образом. 52
Фиг 3 9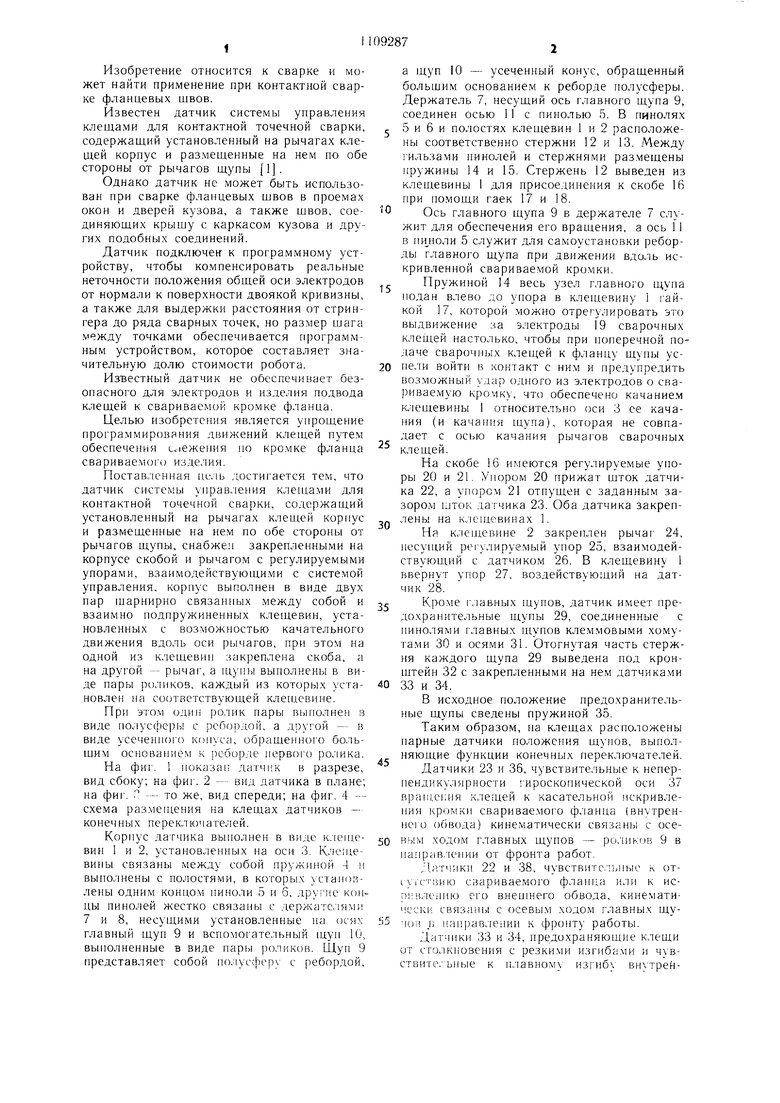

| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК СИСТЕМЫ УПРАВЛЕНИЯ КЛЕЩАМИ ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ ОТБОРТОВОК ПЕРЕМЕННОЙ ШИРИНЫ | 2001 |
|
RU2218253C2 |
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
| С-ОБРАЗНЫЕ ШТОКОВЫЕ КЛЕЩИ ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ ЭЛЕКТРОСВАРКИ, ВСТРОЕННЫЕ В РОБОТ | 2001 |
|
RU2221681C2 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| УПРОЩЕННЫЙ АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2001 |
|
RU2208513C2 |
| СПОСОБ КОПИРОВАЛЬНОЙ ОБРАБОТКИ, КОПИРОВАЛЬНЫЙ ТОКАРНО-ФРЕЗЕРНЫЙ СТАНОК "КТФ-1 МЕК" | 2007 |
|
RU2368484C2 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ АДАПТИВНЫМ ПНЕВМОГИДРАВЛИЧЕСКИМ РОБОТОМ | 2008 |
|
RU2463156C9 |
| Сварочная головка для многопроходнойСВАРКи глубОКиХ РАздЕлОК | 1979 |
|
SU841838A1 |
| УСТРОЙСТВО для ЭЛЕКТРОШЛАКОВОЙ СВАРКИ ВЕРТИКАЛЬНЫХ ШВОВ | 1967 |
|
SU203809A1 |
| Устройство для автоматической сварки криволинейных швов | 1975 |
|
SU529036A1 |
1. ДАТЧИК СИСТЕМЫ УПРАВ ЛЕНИЯ КЛЕЩАМИ ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ, содержащий установленный на рычагах клещей корпус и размещенные на нем по обе стороны от рыча1ов щупы, отличающийся тем, что, с целью упрощения программирования движения клещей путем обеспечения слежения по кромке / /J /J 2 (Л со ьо 00 ф-иг 1 фланца сварпвае.1О1О изделия, он снабжен закрепленными на корпусе скобой п р1,1чагом с регулируемыми упорами, взаимодеиствуюнщмп с системой управления, корпхс выгюлнен в виде пар inapniipno сказанных между собой и взаимно П()дп)ужиненных клещевпп, устапов,тенных с возможностью качате,1ьного движения вдо/П) оси рычагов, при этом па одной из к.чещении закре||лена скоба, а на другоГ( - - . а щупы выно,1нены в виде пары роликов, каждый из KOTOpijix установ.еп на соотве1CTByioiueii клещевпие. 2. Датчик по ir 1. от.тчающцис.я TLMI, что один po.iiiK пары ,;но11 в виде по.1 cijiepi) с ребордой, а дрхтойв виде усечеинсп) конуса, обращенного большим основа1;исм : реборде первого ро.чика. 17
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Применение фирмой : Боинг : гантской точечной машины с цифровы.м равлением | |||
| - «Welding Engineer, 1967, ЛЬ 2 (прототип). | |||
