2, Устройство по п. 2, о т л ичающееся тем, что, с целью обеспечения возможности периодического поворота рычага на ограниченный угол, оно снабжено установленным на
валу ротора кулачком и конечными вы-. ключателями для взаимодействия с последним, а кинематическая связь включает зубчатые передачи и электромагнитные муфты сцепления.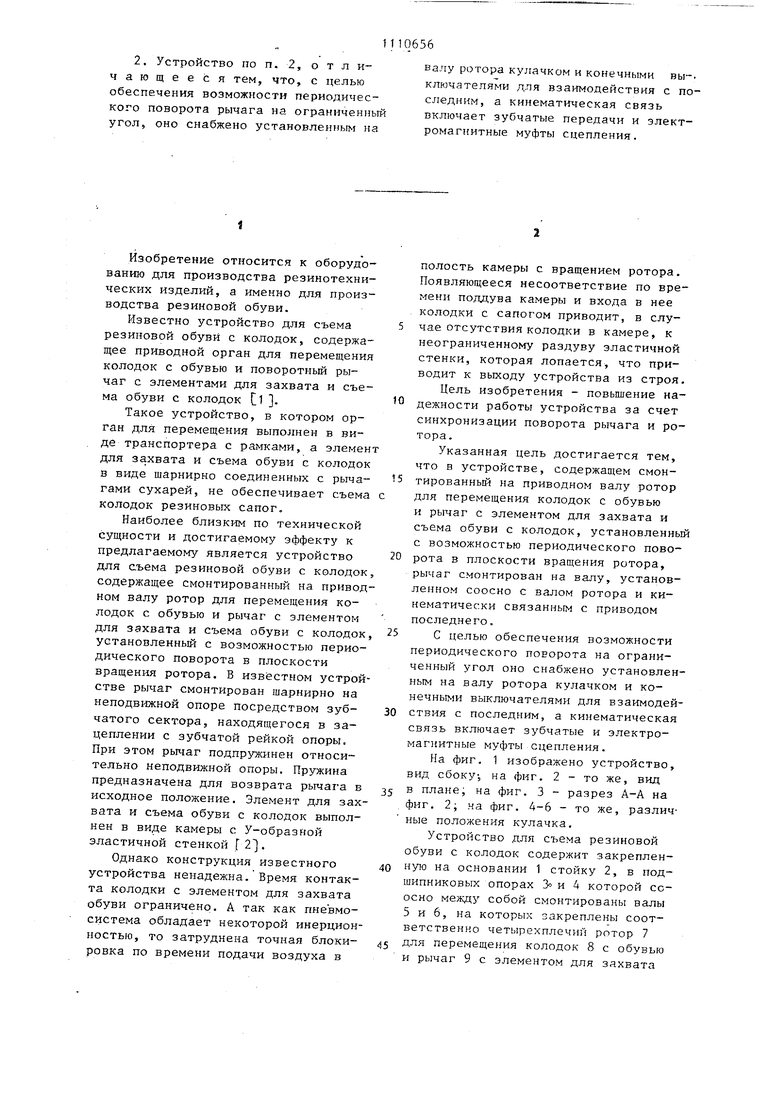
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема резиновой обуви с колодок | 1978 |
|
SU694387A1 |
| Устройство для аппретирования обуви | 1981 |
|
SU969243A1 |
| ПАТЕНТНО-ТЕХ}{Г€~НАЯБЧБЛИО~еКАИ. П. Терешин | 1971 |
|
SU292689A1 |
| Насадочная машина для формования валяных сапог | 1982 |
|
SU1033603A1 |
| Устройство для вулканизации резиновой обуви | 1986 |
|
SU1386480A2 |
| ЭЛЕКТРОГИДРАВЛЙЧЕСКИЙ ПРЕСС ДЛЯ ПРИКЛЕИВАНИЯ | 1973 |
|
SU364303A1 |
| "Машина "Тандем" для сборки обуви" | 1990 |
|
SU1784199A1 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ ОБУВИ | 1964 |
|
SU164822A1 |
| Автоматический комплекс для сборки обуви | 1985 |
|
SU1384315A1 |
| Автоматический противоугонный рельсовый захват | 1975 |
|
SU553192A1 |
1. УСТРОЙСТВО ДЛЯ СЪЕМА РЕЗИНОВОЙ ОБУВИ С КОЛОДОК, содержащее смонтированный на приводном валу ротор для перемещения колодок с обувью к рычаг с элементом для захвата и съема обуви с колодок, установленный с возможностью периодического поворота в плоскости вращения ротора, отличающееся тем, что, с целью повьшения надежности работы устройства за счет синхронизации поворота рычага и ротора, рычаг смонтирован на валу,установленном соосно с валом ротора и кинематически связанном с приводом последнего. (Л О5 сд 0:)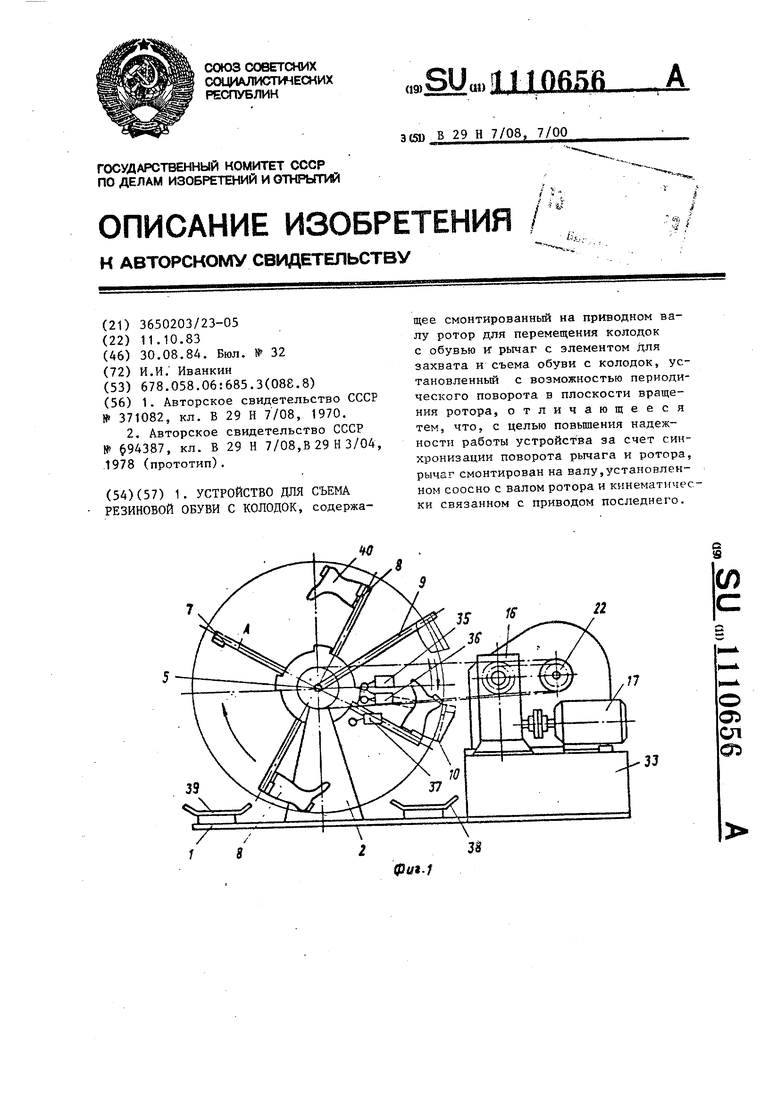
Изобретение относится к оборудованию для производства резинотехнических изделий, а именно для производства резиновой обуви.
Известно устройство для съема резиновой обуви с колодок, содержащее приводной орган для перемещения колодок с обувью и поворотный рычаг с элементами для захвата и съема обуви с колодок Cl
Такое устройство, в котором орган для перемещения выполнен в виде транспортера с рамками, а элемен для захвата и съема обуви с колодок в виде шарнирно соединенных с рычагами сухарей, не обеспечивает съема колодок резиновых сапог.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является устройство для съема резиновой обуви с колодок содержащее смонтированный на приводном валу ротор для перемещения колодок с обувью и рычаг с элементом для захвата и съема обуви с колодок установленньй с возможностью периодического поворота в плоскости вращения ротора. В известном устройстве рычаг смонтирован шарнирно на неподвижной опоре посредством зубчатого сектора, находящегося в зацеплении с зубчатой рейкой опоры, При этом рычаг подпружинен относительно неподвижной опоры. Пружина предназначена для возврата рычага в исходное положение. Элемент для захвата и съема обуви с колодок выполнен в виде камеры с У-образной эластичной стенкой 2.
Однако конструкция известного устройства ненадежна. Время контакта колодки с элементом для захвата обуви ограничено. А так как пневмосистема обладает некоторой инерционностью, то затруднена точная блокировка по времени подачи воздуха в
полость камеры с вращением ротора. Появляющееся несоответствие по времени поддува камеры и входа в нее колодки с сапогом приводит, в случае отсутствия колодки в камере, к неограниченному раздуву эластичной стенки, которая лопается, что приводит к выходу устройства из строя.
Цель изобретения - повышение надежности работы устройства за счет синхронизации поворота рычага и ротора.
Указанная цель достигается тем, что в устройстве, содержащем смонтированный на приводном валу ротор для перемещения колодок с обувью и рычаг с элементом для захвата и съема обуви с колодок, установленны с возможностью периодического поворота в плоскости вращения ротора, рычаг смонтирован на валу, установленном соосно с валом ротора и кинематически связанным с приводом последнего.
С целью обеспечения возможности периодического поворота на ограниченный угол оно снабжено установленнь м на валу ротора кулачком и конечньми выключателями для взаимодействия с последним, а кинематическая связь включает зубчатые и электро- маг)итные муфты сцепления.
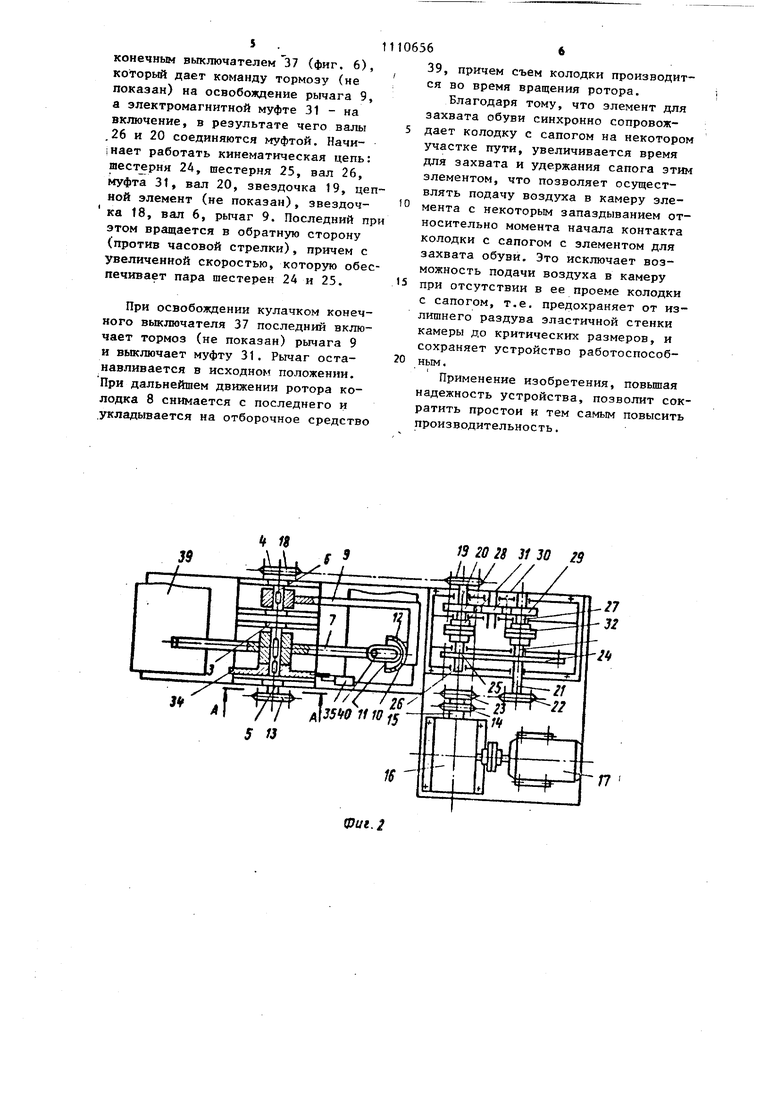
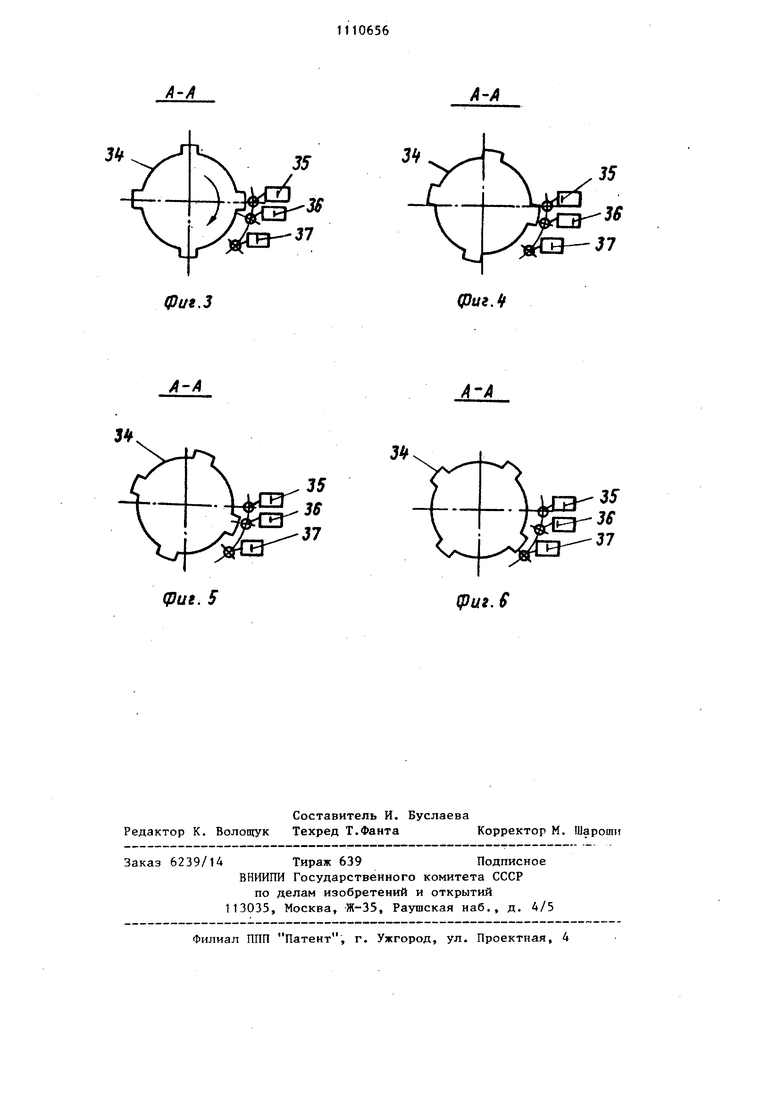
На фиг. 1 изображено устройство, вид сбоку, на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4-6 - то же, различные положения кулачка.
Устройство для съема резиновой обуви с колодок содержит закрепленную на основании 1 стойку 2, в подшипниковых опорах 3 и 4 которой соосно межд5 собой смонтированы валы 5 и 6, на которых закреплены соответственно четырехплечий ротор 7 для перемещения колодок 8 с обувью и рычаг 9 с элементом для захвата 3 и съема обуви с колодок. При этом рычаг 9 имеет возможность периодического поворота на ограниченный угол в плоскости вращения ротора. Элемент для захвата выполнен в вид камеры 10 с У-образной эластичной стенкой 11. Камера соединена через штуцеры 12 с пневмосистемой (не по казана) , а рычаг имеет тормоз (не показаны). Вал 5 ротора связан через цепну передачу с звездочками 13 и 14, последняя из которых смонтирована выходном валу 15 редуктора 16, свя занного с приводом 17. Вал 6 рьмага 9 кинематически связан с приводом 17 ротора. Кинематическая связь включает цепную передачу с звездочками 18 и 19, первая из которых установлена на валу 6 рычага 9, а вторая - на выходном валу 20 коробки скоростей. Входной вал 21 коробки скоростей связан через цеп ную передачу с звездочками 22 и 23 с выходным валом 15 редуктора 16. На входном валу 21 коробки установ лена шестерня 24 зацепления с шестерней 25 на промежуточном валу 26 На выходном валу 20 и на промежуто ном валу 27 установлены шестерни 28 и 29 и промежуточная шестерня 3 Имеются также электромагнитные муф ты 31 и 32 сцепления для периодического соединения вала 20 с приводом 17. Коробка скоростей и привод смонтированы на раме 33, закрепленной на основании 1. На валу 5 смонтирован кулачок 34, а вблизи последнего кулачка - конечные выключатели 35-37. Для отбора снятой с колодки обуви имеется средство 3 а для отбора снятых с ротора колодок - средство 39, выполненное в виде желобчатых конвейеров. Устройство работает следующим о разом. Колодку с изделиями, например с сапогами 40, устанавливают на ро торе 7 в положении А одного из пле ротора 7, причем установку произво дят во время вращения ротора. Вращаясь на валу 5 по часовой стрелке (фиг. 1), ротор 7 выносит попеременно закрепленные на его пл чах колодки 8 с сапогами к камере 10 элемента для захвата, находящег ся с рычагом 9 в исходной позиции в верхнем положении. 4 В момент захода колодки 8 с сапогом 40 в У-образнь й проем эластичной стенки (фиг. 2) вращающийся кулачок 34 своим выступом нажимает на ролик конечного выключателя 35 (фиг., 3), которьй дает команду на отключение тормоза (не показан) рычага 9 и на включение электромагнитной муфты 32, соединяющей валы 21 и 27. Последний через шестерни 29, 30 и 28 передает вращение валу 20 и звездочке 19, а последняя через цепной элемент (не показан) звездочке 15, валу 6 и рычагу 9. Последний начинает вращение в ту же сторону, что и ротор по часовой стрелке. Угловые скорости вращения рычага 9 и ротора 7 одинаковые, поэтому колодка 8 с сапогом 40 движется по окружности синхронно с элементом для захвата, находясь постоянно в проеме У-образной эластичной стенки 11. Через некоторое время после начала движения рычага 9 кулачок 34 своим выступом нажимает на ролик конечного выключателя 36 (фиг. 4), который включает подачу воздуха в камеру 10 из пневмосистемы. Раздуваемая воздухом эластичная стенка 11 обтягивает сапог 40 с колодкой 8 и удерживает его на своем пути по окружности. Синхронное движение ротора с колодкой рычага и элемента для захвата продолжается. Еще через некоторое время кулачок освобождает конечный выключатель 35 (фиг. 5), которьй дает команду на включение тормоза (не показан) рычага и на вьжлючение электромагнитной муфты 32, в результате чего рычаг 9 останавливается и фиксируется тормозом. Ротор же продолжает вращение и увлекает за собой закрепленную на нем колодку 8, отделяя ее от сапога. Последний удерживается эластичной стенкой 11 в зоне камеры 10. Поисходит отделение сапога от колодки. При дальнейшем вращении ротора и кулачка последний освобождает конечный выключатель 36 (фиг. 6), который дает команду на прекращение подачи воздуха в камеру 10. Эластичная стенка 11, сокращаясь, возвращается в первоначальное положение и освобождает сапог, который падает на средство для отбора 39. Продолжая вращение, кулачок 34 входит с конечным выключателем 37 (фиг, 6), который дает команду тормозу (не показан) на освобождение рычага 9, а электромагнитной муфте 31 - на включение, в результате чего валы .26 и 20 соединяются муфтой. Начи|Нает работать кинематическая цепь: шестерня 24, шестерня 25, вал 26, муфта 31, вал 20, звездочка 19, цеп ной элемент (не показан), звездоч ка 18, вал 6, рычаг 9. Последний пр этом вращается в обратную сторону (против часовой стрелки), причем с увеличенной скоростью, которую обес печивает пара шестерен 24 и 25. При освобождении кулачком конечного вьжлючателя 37 последний включает тормоз (не показан) рычага 9 и вьпслючает муфту 31. Рычаг останавливается в исходном положении. При дальнейшем движении ротора колодка 8 снимается с последнего и .укладывается на отборочное средство « .r-fr7. 5 13 f9 го 2S дл/ .2S
Фи1.1 66 39, причем съем колодки производится во время вращения ротора. Благодаря тому, что элемент для захвата обуви синхронно сопровождает колодку с сапогом на некотором участке пути, увеличивается время для захвата и удержания сапога этим элементом, что позволяет осуществлять подачу воздуха в камеру элемента с некоторым запаздыванием относительно момента начала контакта колодки с сапогом с элементом для захвата обуви. Это исключает возможность подачи воздуха в камеру при отсутствии в ее проеме колодки с сапогом, т.е. предохраняет от излишнего раздува эластичной стенки камеры до критических размеров, и сохраняет устройство работоспособным. Применение изобретения, повьшая надежность устройства, позволит сократить простои и тем самым повысить производительность. 3130 гз
АА
А-А
35
А-А
А-А
(Риг. 5
(put.f
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU371082A1 | |
| Солесос | 1922 |
|
SU29A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Солесос | 1922 |
|
SU29A1 |
