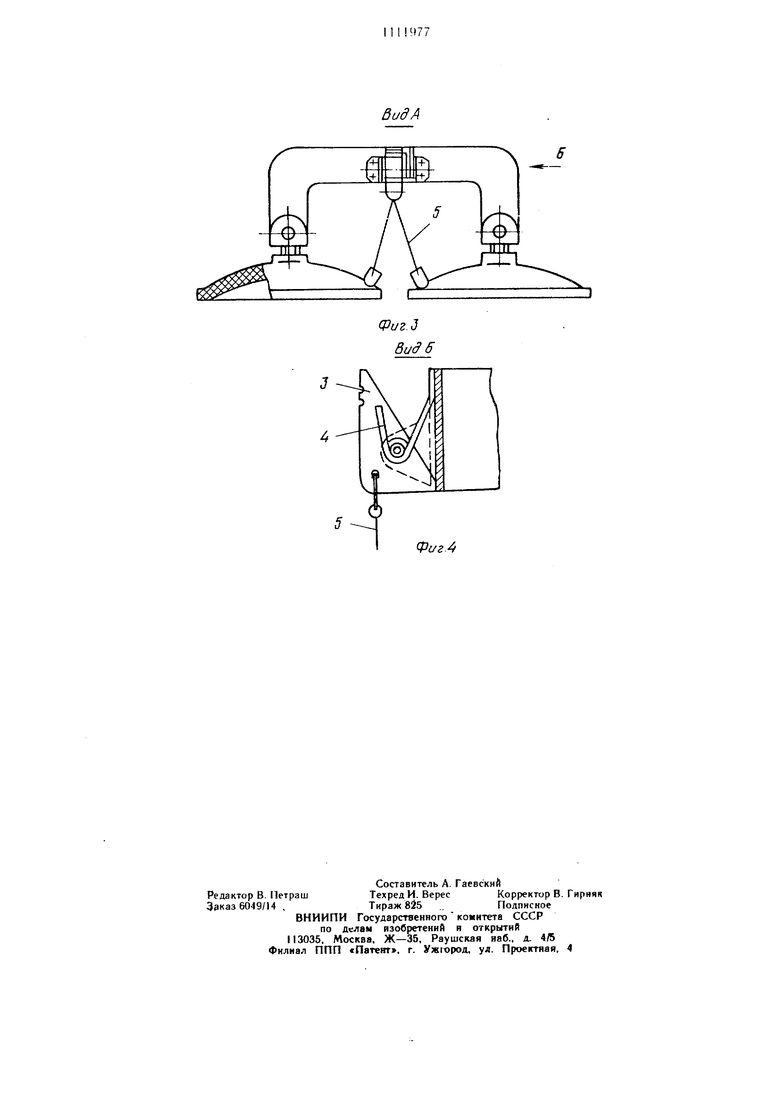
Изобретег1ие относится к грузо.ахпятйым устройстпам и может быть испо.пьзовано для выгюлнертя подъемно-трансгюртных операций с грузами, имеющими относите.1ьио гладкую поверхность, например стекло, металл, пластмассы, облицовоч1и е плиты н т. д: Известен вакуумный захват, содер(а|ций раму, на концах которой сиоитнровапы вакуумные присосы с эластичной манжетой каждый, и механизм депакуумизацин присосов . И естное устройство неудобно в эксги1уатаиии, так как при захвате груза и его освобождение необходимо осугнеетвлять вручную девакуумизацию каждого присоса. В то же время неодновременный привод девакуумизации каждого присоса приводит к нераврюмерному распределению усилий на груз, неодновременному присасыванию к грузу и освобождению от груза, что иногда влечет за собой прел девременный отрыв груза, иовреждение хрупких изделий, например стекла, и травмирование рабочих. Цель изобретения - повышение удобства и надежности в работе. Поставленная цель достигается тем, что в вакуумном захвате, содержащем раму, на концах которой смонтированы вакуумные присосы с эластичной манжетой каждый и механизм девакуумизации присосов, присосы на раме закреплены шарнирно, а механизм девакуумизации представляет собой закрепле1 ный на раме и подпружиненный относительно нее рычаг, соединенный посредством двух тяг с кромками эластнчных манжет присосов,расположенных на одной стороне рамы, при этом эластичные манжеты присосов, расположенных на другой стороне рамы, прикреплены посредством других тяг к раме выше игарнира присоса. На фиг. I показано устройство, вид сбо1су; на фиг. 2 то же, вид сверху; фиг. .1 вид пп стрелке .А на (()иг. 2; на фиг. 4 -- вид но стрелке Б на фиг. 3. Устройство состоит из рамы 1,трех вакуум н,1.х присэсоп 2 с эластичными мар1жетами, двугкпечего рычага 3, подпружиненного нружиной 4, и гибких тяг 5 и 6. Рама имеет Т-образную форму и является рукоятью захвата. Основания присосов соединены с концами рамы посредством шарниров 7. Тяги 5 соединерн с кромками манжет двух нрисосов 2. Тяга 6 одним концом закренлена над шарниром 7 крепления основания третьего присоса, а ее другой конец соединен с кромкой манжеты этого присоса. Устройство работает следующим образом. При прижатии его к нове)хности груза манжеты присосов 2 деформируются, внутренний объем их уменьшается и большая часть воздуха вытесняется в атмосферу. При прекращении силового воздействия манжеты под действием упругих сил стараются вернуть прежнюю фор.г.у. Внутренний объем |1олостей манжет увеличивается, давление воздуха в них уменьн1ается и атмосферным давлением они прижимаются к грузу, нанри.мер листу стекла или металла. Освобождение устройства от груза производится нажатием пальца руки рабочего на рычаг 3 с одновременным поворотом рамы 1 относительно шарнира 7 третьего присоса. При нажатии на рычаг 3 посредством тяг 5 приподнимаются кромки манжет двух прнсосов, обеспечивая доступ в ннх атмосферного воздуха. При повороте рамы относительно шарнира третьего присоса тягсй 6 приподнимается -кромка манжеты и она, каки две первые, освобождается от груза. Предлагаемая конструкция вакуумного устройства обеспечивает улучшение условий труда рабочих за счет создания удобств в эксплуатации захвата и одновременно повышает безопасность его работы.
Фиг.д Вид 6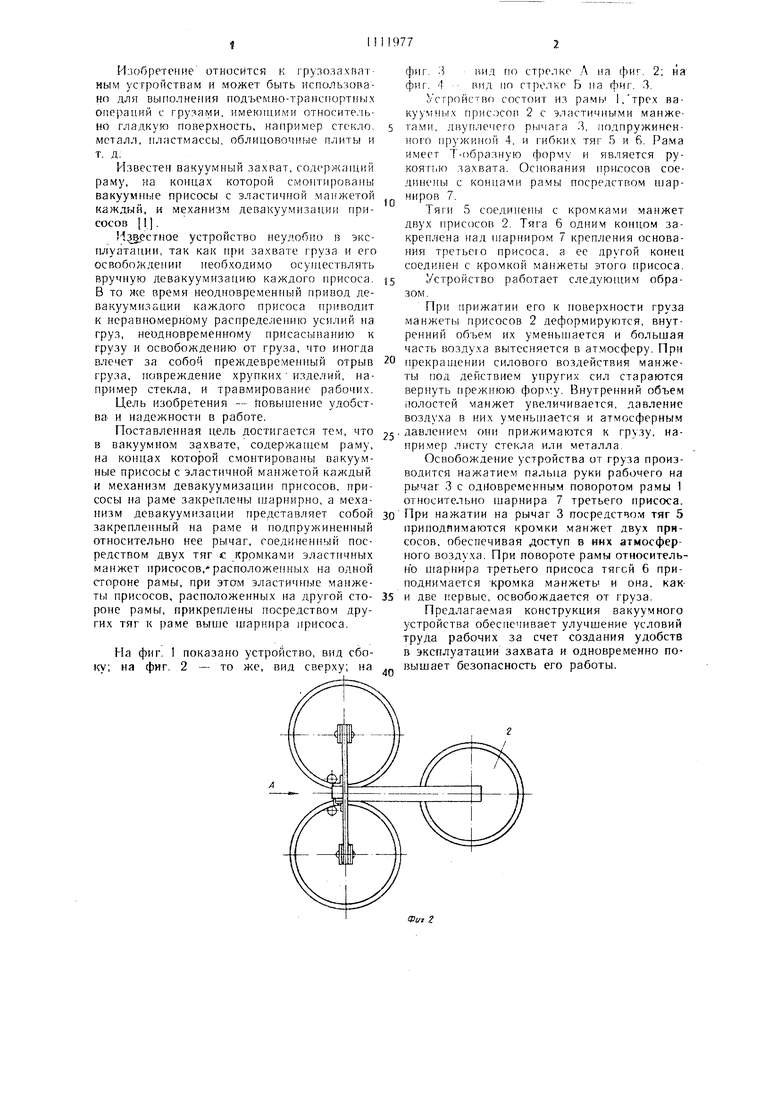
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумная грузозахватная траверса | 1979 |
|
SU903275A1 |
| Устройство для захвата изделий | 1980 |
|
SU944945A1 |
| Вакуумное грузозахватное устройство | 1989 |
|
SU1735187A1 |
| ТЕЛЕЖКА-ЗАХВАТ ДЛЯ КАНТОВАНИЯ, ПЕРЕВОЗКИ И РАЗЛИВА ЖИДКОСТИ ИЗ ГОРИЗОНТАЛЬНОЙ БОЧКИ | 1989 |
|
RU2015050C1 |
| Автоматический вакуумный перекладчик грузов | 1983 |
|
SU1209559A1 |
| Вакуумное захватное устройство | 1983 |
|
SU1184785A1 |
| Устройство для автоматической подачи заготовок и выдачи готовых задников к машине для формования задников | 1955 |
|
SU107378A1 |
| Устройство для автоматической подачи листов к валковому механизму | 1973 |
|
SU506458A1 |
| Грузозахватное устройство | 1990 |
|
SU1759775A1 |
| Устройство для укладки штучных предметов | 1973 |
|
SU501015A1 |
ВАКУУМНЫЙ ЗАХВАТ, содержащий раму, на копнах которой смонтированы вакуумные присосы с эластичной мам жетой каждый, и Me.vnHii.iM девакуумиза ции нрисосов, отличающийся тем, что, с целью повышения удобства и надежности в работе, присосы на раме закреплены шарнирно, а механизм девакуумизации представ ляет собой закрепленный на раме и подпружиненный относительно нее рычаг, соединенный посредством двух тяг с кромками эластичных манжет- присосов. расположенных на одной стороне рамы, при этом эластичные манжеты присосов, расположенных на другой стороне рамы, прикреплены посредством других тяг к раме выше 1парнира присоса. NJ Ч
| Гницевич Е | |||
| П | |||
| Технология и механизация стекольных работ | |||
| М., Стройиздат, 1973, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
