Изобретение относится к станкостроению и может найти применение при механической обработке изделий.
Известен роторный автомат для сверлильных операций, содержащий равномерно расположенные по его окружности зажимные приспособления и инструментальные супнорты, при этом каждый суппорт выполнен в виде двух плит, одна из которых жестко закреплена на направляющих, подпружиненных относительно второй плиты, при этом первая плита расположена между зажимным приспособлением и второй плитой (1 .
Недостатками указанного автомата являются отсутствие жесткого фиксированного положения инструме 1та относительно обрабатываемого изделия, что понижает осевую точность обработки отверстия, а также наличие отде шного устройства (заталки1.;гд..1я) Д.ЛЯ подачи изделия в зажимное :,иис;:.1соб: е ше, что усложняет конструкn.Ht ; 1 опижает производительность авто rifj,
Цолью изобретения является повыщение :; И1изводительности, точности обработки . ,-;.; 1|цеине конструкции.
Поставленная цель достигается тем, что i: pDiufiHOM автомате для сверлильных операций, содержащем равномерно располокениые по окружности зажимные приспособ; :Пя и инструментальные суппорты, при лиждый суппорт выполнен в виде двух Min, :|(-;)вая из которых жестко закреплена i;. ;:-| 1ранляющи-, подпружиненных относи ч,к.) второй цлиты, нервая плита расin.i()/ ;eiia между зажимным приснособле: и 1гг(.)рой плитой, каждый супгюрт снаб,;.. i ,j:biiie;icM обрабатываемого изделия
., ,:,; :i г.1:-|той с регу.лируемым упором, ;;,; ., icvi .м;)а1ггель выполнен в виде центриOv;i;;i;;/ii ;;,, установлепной на цервой м.гпч с;;(Х1К) с зажимным устройством с :1:;,.;./киостью врагцения, третья плита за-.:;.;.;i( ьа на направлякицих сушюрта, а ,, . i.j;b; расположены между второй и iv; 1, алнтами.
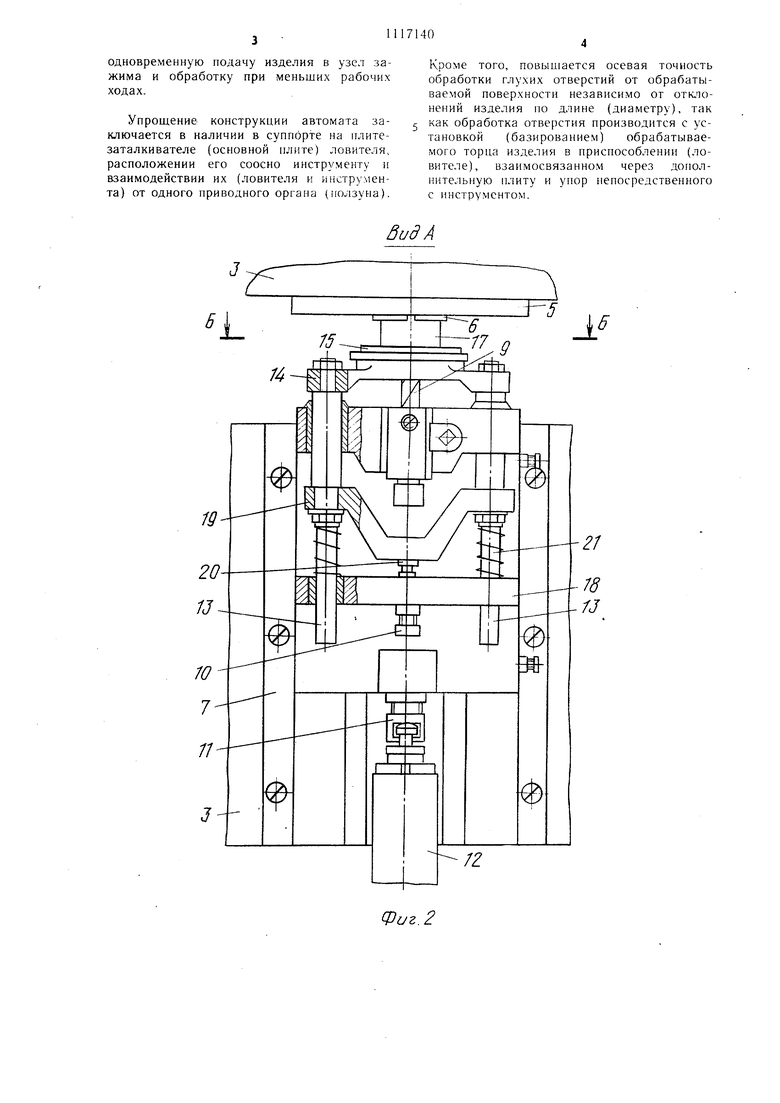
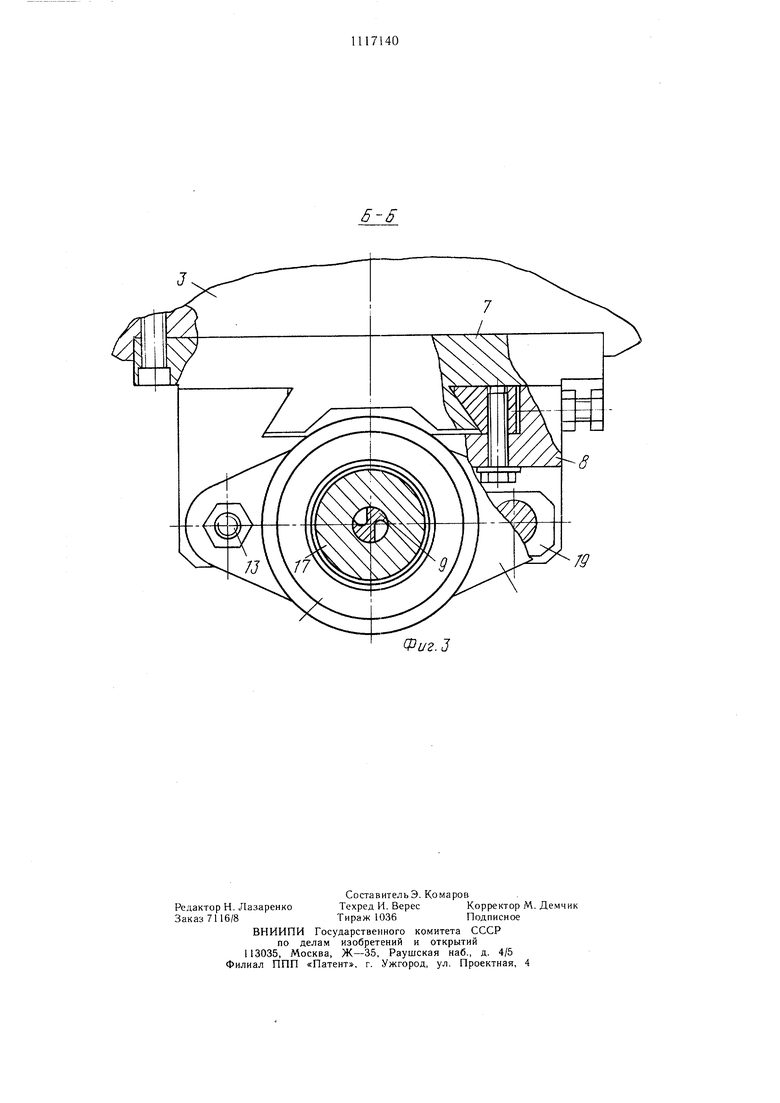
i i;: фчг. 1 показан |н/гс)рпый автомаг; .., vj),,/. 2 -- вид А на фиг. 1; на фиг. .. :;; :;)03 Б- Б на фиг. 2.
Рогор1|)1Й iiBTOMHT для сверлильных V4 ;,.;ii;M: сосгоит из станины 1, па которой -. ... рабочий ротор 2.
;;u.),ii ротор 2 имеет блоколержате.ч, 3, , iVi гп|)опа11ный на вра1цан) залу 4. 3 I.;:. TL-4: ax б. ОкодсрИчптслЯ .i в верхней ei-(i ;;::: :ан: ол:с:;:-1О ,( ои; ужцости уста -Ji:,:,, ::i:.:. :U..|C ЦрИСГ1ОСОб, 5, ВЫi :;:.; : K:i;,0 ШПИН Д1-Л ЬН ЫХ 1ОЛОВОК.
: ) ч. :).;. 6. в iiaCTH блоко. -.-,т--ля 3, Бынолнеицой .-j виде много, j.. ;i,i каждой грани закреплено ос. ; -.1- 7, ;Г1Правля1011и1.; которого (
«ласточкин хвост) установлен с возможностью перемещения в вертикальном направлении инструментальный суппорт 8.
Суппорт 8 несет установленный соосно цанге б инструмент 9, регулируемый упор 10 и ложку 11, связанную с нолзуном 12 привода подачи суппорта.
На суппорте 8 на двух направляющих 13 закреплена плита 14, имеющая ловитель 15, установленный на подшипнике 16 соосно обрабатываемому изделию 17 и инструменту 9, при этом ловитель 15 выполнен в виде центрирующей втулки, а плита 14 подиружинена относительно второй плиты 18.
На этих же направляющих 13 параллельно плите 14 жестко закреплена третья плита 19, взаимодействующая своим регулируемым упором 20, с регулируе.мым упором 11, установленным на суппорте 8.
Направляющие 13 с плитами 14 и 19 подвижны относительно суппорта 8 и связаны с последними пружинами 21.
Автомат работает следующим образом.
Нри вращении вала 4 обрабатываемые изделия 17 подаются в приемную часть рабочего ротора 2. Ходом суппорта 8 вверх от ползуна 12 ловитель 15 плиты 14 нодает изделие 17 в цангу 6 шпиндельной головки 5 до упора (не показан), где оно закрепляется, фиксируется осевое положение торца обрабатываемого изделия 17 относительно инструмента 9 до обработки.
Затем при дальнейшем движении суппорта 8 с инструментом 9 вверх сжимаются пружины 21 паправл5цощих 13 и производится обработка отверстия до касания регулируемого упора 10 с упором 20 третьей плиты 19 -- фиксируется строго определенное (jceiioe положение инструмента 9 в конце сзбработки относительно торца обрабатываемого изделия 17.
о окд.-:й1:иц реза. цакга б разжи мается и издс.шс 17, находясь в ловителе 15, опускаете;. ь исте с суппорт).. вниз в ирисмнук; :;ь..т. j;i5oiero рц-тира н;; траекторию потока ;;здсл|1|, г;;,е забирается, на фимср, ,.i ::ar:ib;vi (.|;ГУНОМ трапспортпого
I : i |О;-;а Uiii 1 .
lijni /ui biii rUiie:vi опускацми суппорта 8 ма r.;iv6n( L( -.арма:-;;; (вь;точки) л л-ителя 15 изделие i--;,iХУДИТ из пос.чеднего и удаляется из ирисмнсй часги рабочего ротора уцомяну1ым транспортным ротором (не показан).
При этом сунпорт 8 с 1литой 14 и ловит(лем 15 занимают исходное чо.тожение. и далее цикл повторяется.
i ред. роторный автомат об.тадает повьпценной ироиззодительностью (35 шт./мин)., выражающейся в совмещении пер(ме1цений плиты-заталкнвателя (ocfioaг;ой н.1ит)Г) к HHCTi)vv:cHT3, Чп. обеспеч игаст
одновременную подачу изделия в узел зажима и обработку при меньших рабочих ходах.
Упрощение конструкции автомата заключается в наличии Б суппорте на плитезаталкивателе (основной плите) ловителя, расположении его соосно инструменту и взаимодействии их (ловителя и инструмента) от одного приводного органа (ползуна).
Кроме того, повышается осевая точность обработки глухих отверстий от обрабатываемой поверхности независимо от отклонений изделия по длине (диаметру), так как обработка отверстия производится с установкой (базированием) обрабатываемого торца изделия в приспособлении (ловителе), взаимосвязанном через дополнительную плиту и упор непосредственного с инструментом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный сверлильный автомат | 1979 |
|
SU772742A1 |
| УНИВЕРСАЛЬНЫЙ НАСТОЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ДРЕВЕСИНЫ И МЕТАЛЛА | 1992 |
|
RU2050227C1 |
| РОТОРНО-КОНВЕЙЕРНАЯ ЛИНИЯ | 1992 |
|
RU2036771C1 |
| Устройство для предохранения роторной машины от перегрузки | 1986 |
|
SU1449318A1 |
| РОТОРНАЯ МАШИНА | 1972 |
|
SU349496A1 |
| Роторный автомат | 1984 |
|
SU1255392A1 |
| Механизм подачи металлорежущего станка | 1986 |
|
SU1328075A1 |
| Роторный автомат | 1990 |
|
SU1717317A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТОКАРНЫЙ СТАНОК | 1996 |
|
RU2103114C1 |
| Роторный автомат | 1989 |
|
SU1662806A2 |
РОТОРНЫЙ АВТОМАТ ДЛЯ СВЕРЛИЛЬНЫХ ОПЕРАЦИЙ, содержащий равномерно расположенные по его окружности зажимные приспособления и инструментальные суппорты, при этом каждый суппорт выполнен в виде двух плит, первая из которых жестко закреплена на направляющих, подпружиненных относительно второй плиты, первая плита расположена между зажимным приспособлением и второй плитой отличающийся тем, что, с целью повыщения производительности и точности обработки, каждый суппорт снабжен ловителем обрабатываемого изделия и третьей плитой с регулируемым упором, при этом ловитель выполнен в виде центрирующей втулки, установленной на первой плите соосно с зажимным устройством с возможностью вращения, третья плита закреплена на направляющих суппорта, а пружины расположены между второй и третьей плитами. (/ С j
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Роторный сверлильный автомат | 1979 |
|
SU772742A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
