Изобретение отиоеится к машиностроению, а именно к манипуляторам, нредназначенным для выполнения операций с выеокой точностью нозиционирования.
По основному авт. св. № 872247 известен манипулятор, содержащий корпус, иснолнительное звено с шарнирно установленным на нем за.хватом, основным и донолнитель ными нриводами, установленными в корнусс и кинематически связанными с исполнито,1ьным звеном, ншрнирно соединенным с корпусом. Каждая стенень подвижности кистевого узла, предназначенная для обеспечения движений исполнительного звена типа качание или выдвижение (втягивание), снабжена одним дополнительным приводом, 0 тина ротация двумя, причем дополнительные приводы выполнены в Виде термо биметаллических элементов 1.
Недостатками известного кистевого узла являются ограниченность технологических (юзможностей и областн применения, носко.чьку перед включение.м кистево1о уз.la в работу для точного позпцнонировапия с НОМОИ1ЫО доиолнительных ириводов манипулятор нервоначально обеспечивает |рубое позпнионирование с погрегиностью одного знака, что не всегда удается обеспечить в реальных условиях функционирования, и низкис технико-эксн;|уатационные харак1ч ристикн, в частности надежность, манев|)(.чп1ость и грузонод1)емность, в связи с тем, что каждая стенень подвижности кистево1о узла обеспечивается только одпим допол||ите.11дН)1м приводом, а дополнительные при|рд| | других степеней подвижности на это фи1жени1; влияния не оказывают, вернее, сни жакл эффективность работы дополнительного п)ивода рассматривае.мой степени нодвижпости, так как последний должен н)содо,1евать сопротивление не только собственного восстанавливающего эле.менга, ио и восстанавливающих элементов других дополнительных приводов.
Цс.Нз изобретения -- раещирение технологических возможностей путем повьннения падсжности и маневренности.
Указанная цель достигается тем, что в кистевом узле манипулятора дополнительные приводы установлены в корпусе нонарно и соосно, а их оси составляют с осью исполнительного звена угол 45°.
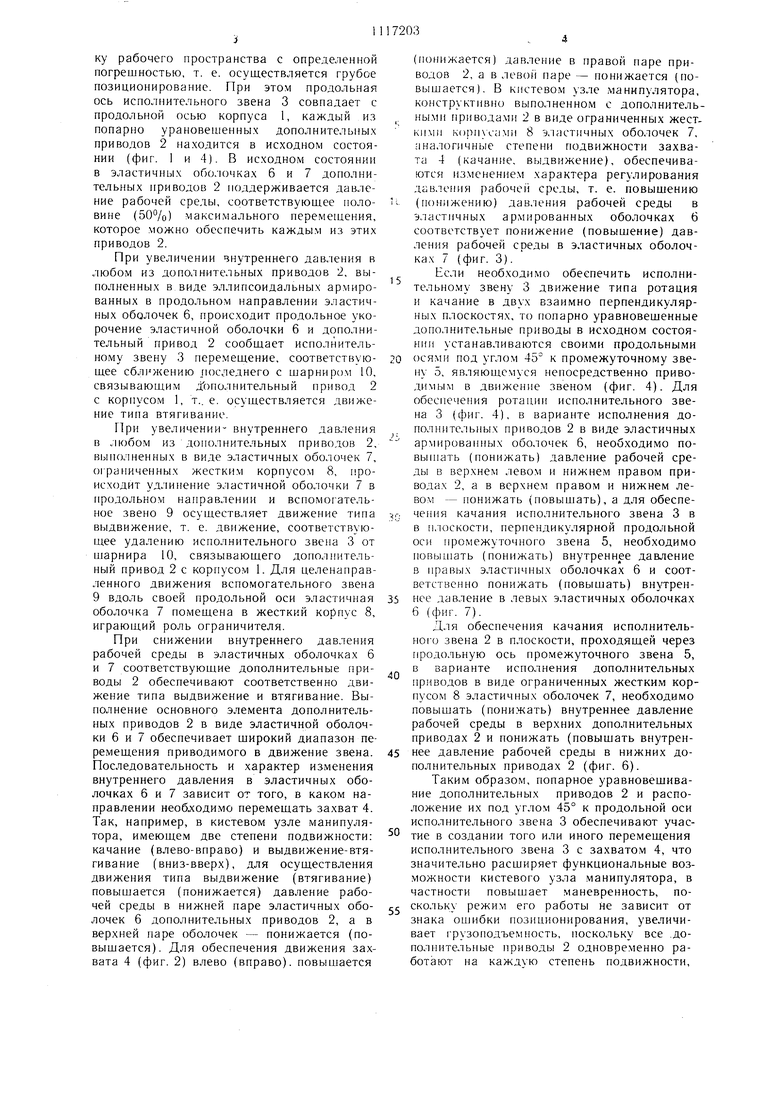
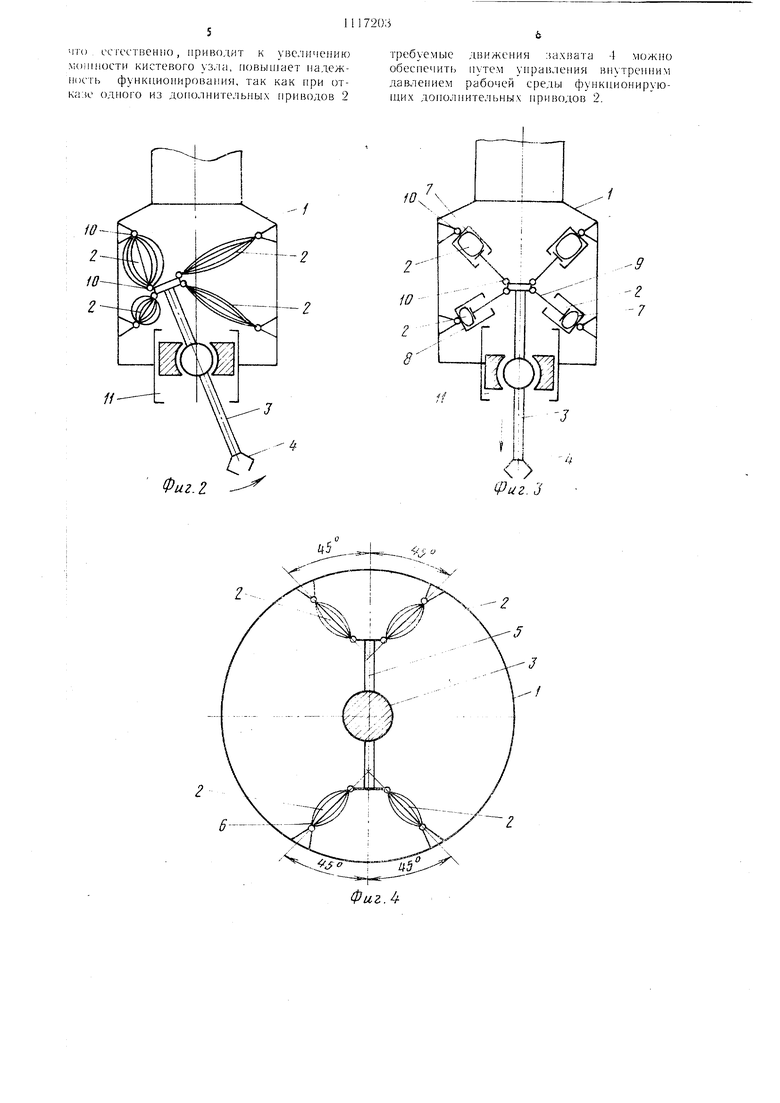
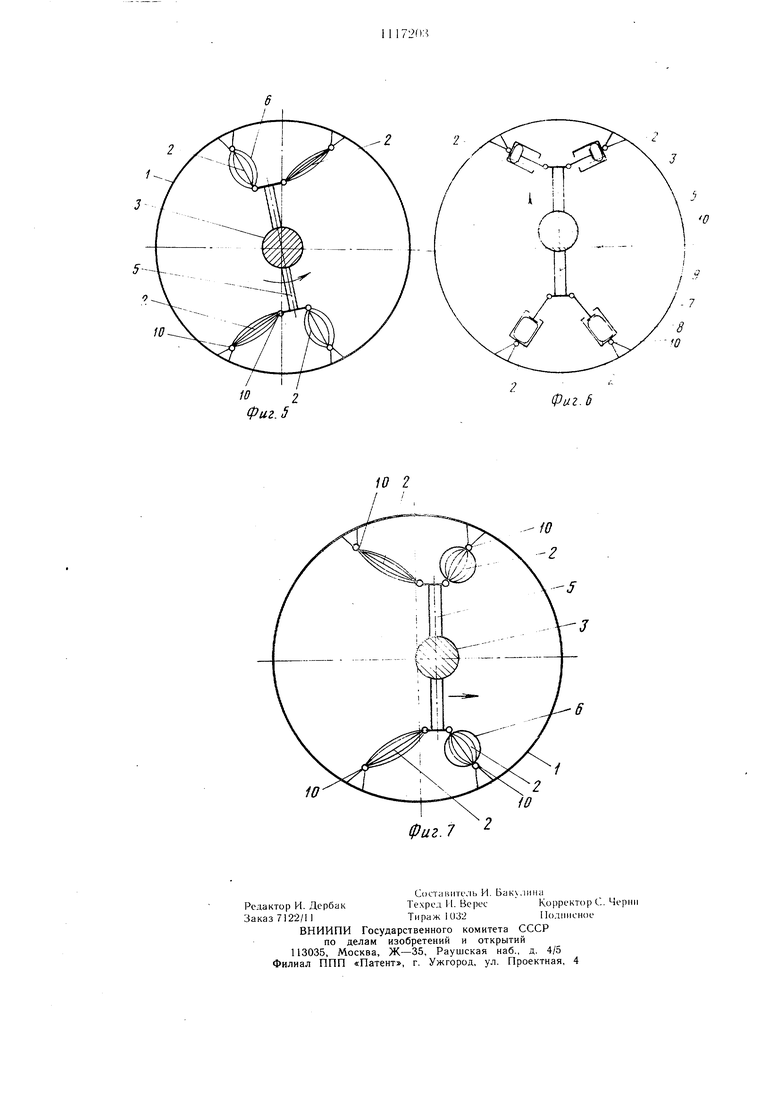
На фиг. 1 изображен кистевой узе;1 манинулятора с двумя степенями подвижности (качание, выдвижение) с донолнительными нривода.ми в виде эллипсоидальны.ч армированных в продольном направлении оболочек, исходное состояние, нро;ю,:1Ы1ЫЙ разрез; на фиг. 2 - рабочее положение при сообщении исполнительно.му звену движения типа качание влево-вправо, в частности качание влево; на фиг. 3 кистевой узе, манину;1ятора с двумя степенями подвижности (качание, выдвижепие) с доиолнительными нриводами в виде эластичных оболочек, orpaHn4eniHjix в поперечном направлении цилиндрическим жестким корпусом, в рабочем ноложении при сообщении исгюлнительном звену движепия типа выдвижепие (втягивание) вверх-вниз, в частности -- вниз, продольный разрез; на фиг. 4 - то же, с тремя етененями подвижности (ротация, качание в двух взаимно перпендикулярных плоскостях) с догюлнительны.ми нриводами в виде эллипсоидальных ар.мированных в продольном направ.гепии оболочек, исходное состояние, поперечный разрез; на фиг. 5 - то же, при выполнении движения типа ротация; на фиг. 6 - то же, с донолнитедьными привода в виде эластичных оболочек, ограниченных в Г1онереч}1о.м направ.чении цилиндрпчески.м жестким корпусом, при выполнении движепия типа качание, поперечный разрез; на фиг. 7 - то же, тина качание.
Кг;стевой узел манинулятора состоит из по;1г)го корпуса 1, внутри которого устаHoti.RMiiji дополнительные приводы 2, связапн| 1е щарнирно с иснолнительным зве.чом 3 захвата 4 и корпусо.м I. В различньгх fiapnaHTax выполнения кистевого узла движение исполнительному звену может передапатьея пепоередствекно от донолнигельных приводов 2 или с по.мощью промежуточного звена 5, жестко связанного с испо;п1ительным звено.м 3. В нервом случае приводи.мым звеном для донолнительньгх приводов является исполнительное звено 3, а во втором - промежут(;чное звено 5. Дополнительные приводы 2 каждой степени подвижности кистевого узла нонарно уравновешены и установлены в корпусе своими продольными осями иод угло.м 45 к продольной оси нриводимого ими в движение звена (иенолнительного звена 3 - для фиг. 1-3; про.межуточного звена 5 - для фиг. 4-2).
В одних вариантах кистевого узла (фиг. 1 2, 4, 5 и 7) дополнительные нриводы 2 выпол пены в виде эллипсоидальных армированных в продольном направлении эластичных оболочек 6. В других вариантах кистевого узла манипулятора (фиг. 3 и 6), каждый дополнительный привод содержит эластичную оболочку7, ограниченную в поперечном направлении цилиндрическим жестким корпусо.м 8, и всномогательное звено 9, связанное с приводным звеном с по.мощью шарниров 10. Исполнительное звено 3 в каждом варианте выполнения кистевого узла .манипулятора установлено в корпусе 1 с помон ью многостепенного шарнира 11.
Устройство работает следующим образом.
При подаче сигналов управления на основные нриводы кистевой узел манинулятора перемещает захват 4 в требуелпю точку рабочего пространства с определенной ногрешностью, т. е. осуш.ествляется грубое позиционирование. При этом продольная ось исполнительного звена 3 совпадает с продольной осью корпуса 1, каждый из попарно урановешенных дополнительных приводов 2 находится в исходном состоянии (фиг. 1 и 4). В исходном состоянии в эластичных оболочках 6 и 7 дополнительных приводов 2 поддерживается давление рабочей среды, соответствующее половине (50%) максимального перемещения, которое можно обеспечить каждым из этих приводов 2.
При увеличении внутреннего давления в любом из дополнительных приводов 2, выполненных в виде эллипсоидальных армированных в продольном направлении эластичных оболочек б, происходит продольное укорочение эластичной оболочки 6 и дополнительный привод 2 сообщает исполнительному звену 3 перемещение, соответствующее сближению последнего с щарниром 10, связывающим дополнительный привод 2 с корпусом 1, т.. е. осуществляется движение типа втягивание.
При увеличении- внутреннего давления в ;|юбом из дополнительных приводов 2, вынолненных в виде эластичных оболочек 7, ограниченных жестким корпусом 8, происходит удлинение эластичной оболочки 7 в продольном направлении и вспомогательное звено 9 осуществляет движение типа выдвижение, т. е. движение, соответствующее удалению исполнительного звепа 3 от щарнира 10, связывающего дополнительный привод 2 с корпусом 1. Для целенаправленного движения вспомогательного звена 9 вдоль своей продольной оси эластичная оболочка 7 по.мещена в жесткий корпус 8, играющий роль ограничителя.
При снижении внутреннего давления рабочей среды в эластичных оболочках 6 и 7 соответствующие дополнительные приводы 2 обеспечивают соответственно движение типа выдвижение и втягивание. Выполнение основного элемента дополнительных приводов 2 в виде эластичной оболочки 6 и 7 обеспечивает широкий диапазон перемещения приводимого в движение звена. Последовательность и характер изменения внутреннего давления в эластичных оболочках 6 и 7 зависит от того, в каком направлении необлодимо перемещать захват 4. Так, например, в кистевом узле манипулятора, имеющем две степени подвижности: качание (влево-вправо) и выдвижение-втягивание (вниз-вверх), для осуществления движения типа выдвижение (втягивание) повышается (понижается) давление рабочей среды в нижней паре эластичных оболочек б дополнительных приводов 2, а в верхней паре оболочек - понижается (повыщается). Для обеспечения движения захвата 4 (фиг. 2) влево (вправо), повышается
(понижается) давление в правой паре приводов 2, а в левой паре - понижается (повышается). В кистевом узле .манипулятора, конструктивно выполненном с дополнительными приводами 2 в виде ограниченных жестКПМ11 корпусами 8 эластичных оболочек 7, аналогичные степени подвижности захвата 4 (качание, выдвижение), обеспечиваются изменение.м характера регулирования давления рабоче) среды, т. е. повышению (понижению) давления рабочей среды в эластичных армированных оболочках б соответствует понижение (повышение) давления рабочей среды в эластичных оболочках 7 (фиг. 3).
Если необходимо обеспечить исполнительному звену 3 движение типа ротация и качание в двух взаимно перпендикулярных плоскостях, то попарно уравновешенные дополнительные приводы в исходном состоянии устанавливаются своими продольными осямп под углом 45° к промежуточному звену 5, являющемуся непосредственно приводимым в движение звеном (фиг. 4). Для обеспечения ротации исполнительного звена 3 (фиг. 4), в варианте исполнения дополнительных приводов 2 в виде эластичных армировапных оболочек 6, необходимо повьппать (понижать) давление рабочей среды в верхнем лево.м и нижнем правом приводах 2, а в верхнем правом и нижнем левом - понижать (повышать), а для обеспечения качания исполнительного звена 3 в в плоскости, перпендикулярной продольной оси промежуточного звена 5, необходимо повышать (понижать) внутреннее давление в правых эластичных оболочках 6 и соответственно понижать (повышать) внутреннее давление в левых эластичных оболочках 6 (фпг. 7).
Для обеспечения качания исполнительного звена 2 в плоскости, проходящей через продольную ось промежуточного звена 5, в варианте исполнения дополнительных приводов в виде ограниченных жестким корпусом 8 эластичных оболочек 7, необходимо повышать (понижать) внутреннее давление рабочей среды в верхних дополнительных приводах 2 и понижать (повышать внутреннее давление рабочей среды в нижних дополнительных приводах 2 (фиг. 6).
Таким образом, попарное уравновешивание дополнительных приводов 2 и расположение их под углом 45° к продольной оси исполнительного звена 3 обеспечивают участие в создании того или иного перемещения исполнительного звена 3 с захватом 4, что значительно расщиряет функциональные возможности кистевого узла манипулятора, в частности повыщает .маневренность, поскольку режим его работы Не зависит от знака ошибки позиционирования, увеличивает 1рузоподъемпость, поскольку все .дополпительные приводы 2 одновременно работают на каждую степень подвижности.
5
что естественно, приводит к увс.п-гчению .;oiiiiioCTn кистевого узла, повьииает надежность функционирования, так как при отказе одного из дополнительных нриводов 2
требуемые движения захвата 4 можно обеспечить путем управления внутренним давлением рабочей среды функционирующих донолпительных нриводов 2.
-г
-7
иг.З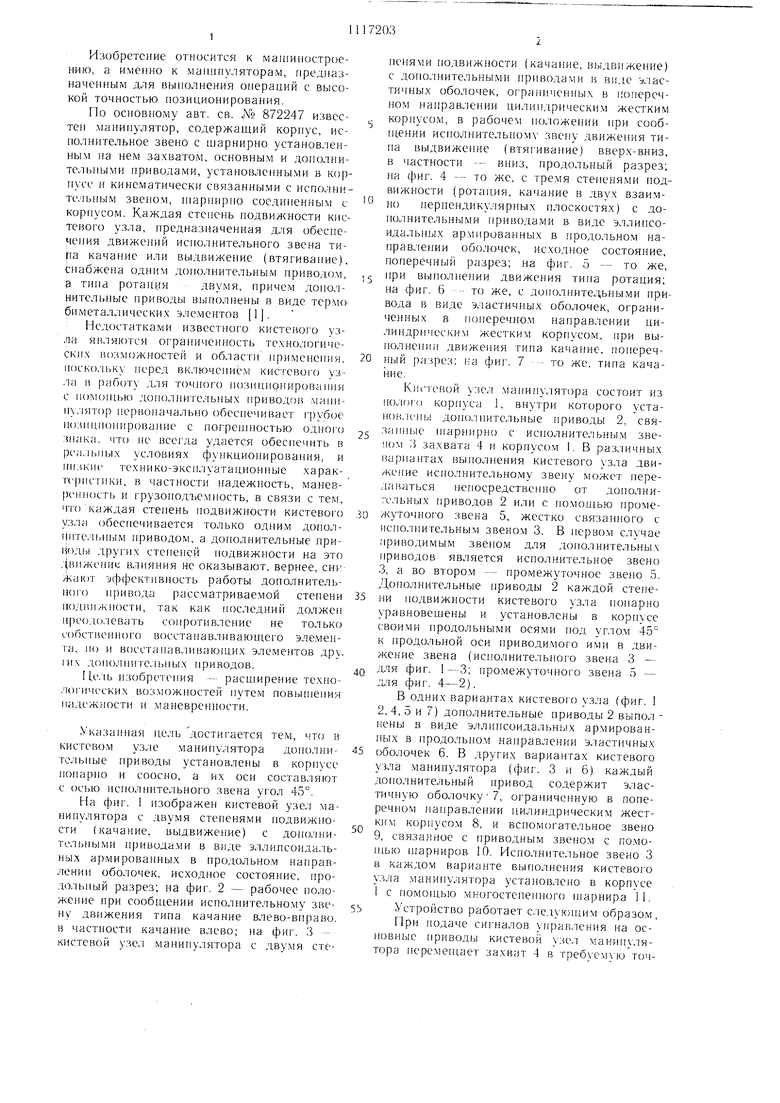
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU919804A1 |
| Манипулятор | 1976 |
|
SU653103A1 |
| Манипулятор | 1979 |
|
SU871991A1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Многофункциональный активный ортез руки | 2022 |
|
RU2791396C1 |
| Манипулятор | 1991 |
|
SU1757876A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU861060A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
КИСТЕВОЙ УЗЕЛ МАНИПУЛЯТОРА но авт. св. № 872247, отличающийся тем. что, с целью расширения технологически.х возможностей нуте.м повышения наде.жностн и маневренности, донолн.итель11ые приводы установлены в корпусе попарно и соосно, а и.х оси составляют с осью исполнительного звена угол 45°. сл 2 to о 00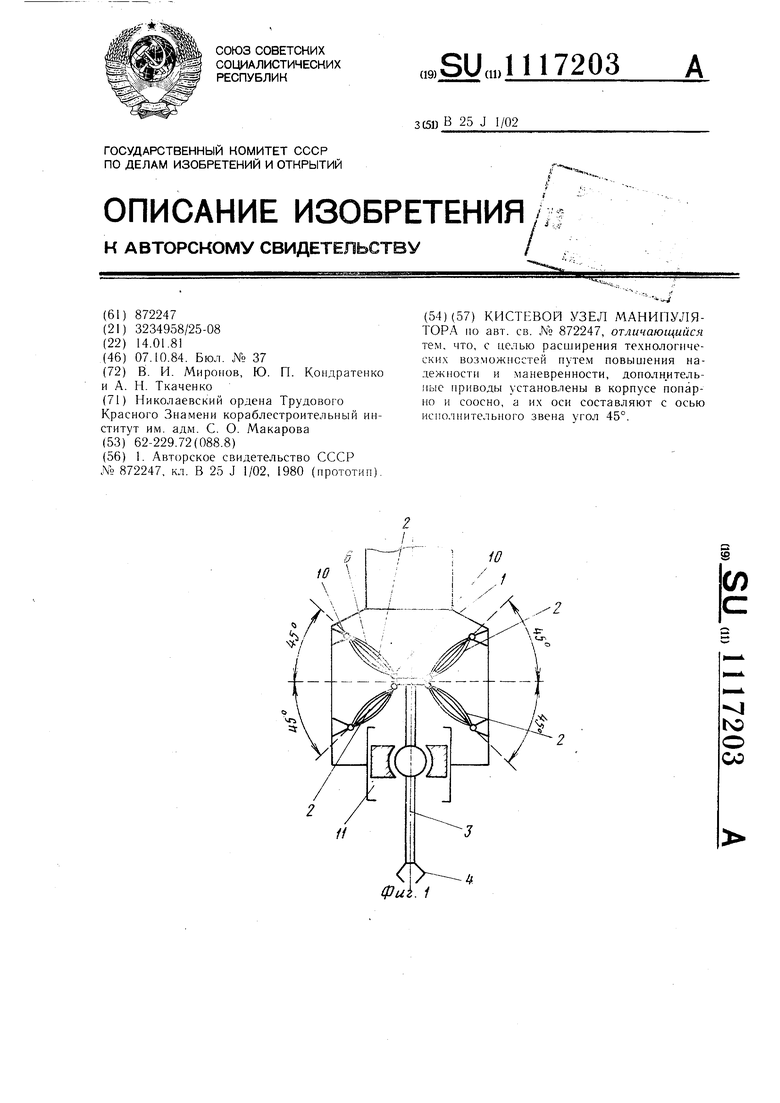
2
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кистевой узел манипулятора | 1980 |
|
SU872247A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
