1 Изобретение относится к манипуйяторам с ручным управлением предназначенным для механизации труда рабочего, связанного с загрузкой и разгрузкой технологического оборудовани и может быть использовано в различны отраслях промьппленности, преимущественно в машиностроении. Известен манипулятор, содержащий основание с поворотным корпусом, уст новленный на нем пантограф с захвато и силовой цилиндр для. уравновешивани .груза, шток которого связан с пантографом, а поршневая полость через редукционный клапан - с источником питания m. Однако давление в поршневой полос силового привода при изменении веса груза устанавливается ручной регулировкой редукционного клапана. Цель изобретения - автоматизация процесса установки давления в силовом цилиндре при изменении веса навешиваемого груза на пантограф, т.е. повышение надежности процесса уравновешивания пантографа. Поставленная цель достигается тем что манипулятор снабжен регулировочны зинтом, предназначенным для взаимодей ствия с чувствительным элементом редукционного клапана, и рычагами, один из которых одним концом жестко смонтирован на крьш1ке силового цилиндра, а другой шарнирно установлен на поворотном корпусе, при этом другие концы рычагов шарнирно соединены между собой, а регулировочный винт расположен в этом шарнире. На чертеже схематически изображена конструкция предлагаемого манипулятЪра. 23 Манипулятор состоит из основания 1, на котором с возможностью поворота вокруг вертикальной оси установлен корпус 2. Рука манипулятора: выполнена в виде пантографа 3 с захватом А и шарнирно соединена с корпусом 2 и штоком 5 силового цилиндра 6, Поршневая полость силового цилиндра 6 соединена с источником питания Через редукционный клапан 7 посредством гибкого шланга 8. В редукционном клапане 7 имеется регулировочный винт -9. Устройство включает также систему рычагов 10 и 11, предназначенных для редуцирования усилия от корпуса силового цилиндра 6 к чувствительному злементу редукционного клапана 7 посредством регулировочного винта 9. Манипулятор работает следующим образом. В зависимости от величинь навешенного груза регулировочный винт 9, установленный на рычагах 10 и 11, нажимает на чувствительный элемент редукционного клапана 7 с большим или меньшим усилием. В зависимости от величины силы нажатия на чувствительный элемент редукционный клапан задает определенное давление рабочего тела в поршневЪй полости уравновешивающего цилиндра 6i Таким образом, для каждой величины груза автоматически устанавливается необходимое давление сжатого воздуха. -Использование предлагаемого манипулятора позволяет повысить производительность погрузочно-раз грузочных работ и безопасность работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированный манипулятор с ручным управлением | 1988 |
|
SU1618634A1 |
| Манипулятор | 1982 |
|
SU1148776A1 |
| Манипулятор с ручным управлением | 1983 |
|
SU1129067A1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
| Манипулятор | 1980 |
|
SU872251A1 |
| Промышленный робот | 1983 |
|
SU1127766A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Манипулятор с ручным управлением | 1985 |
|
SU1315288A1 |
| Транспортное средство для перевозки длинномерных грузов | 1987 |
|
SU1516397A1 |
| Погрузочный манипулятор | 1980 |
|
SU906934A1 |
МАНИПУЛЯТОР, содержащий основание с поворотным корпусом, установленный на нем пантограф с захватом и силовой цилиндр, шток которого связан с пантографом, а поршневая полость через редукционный клапан - с источником питания, о т, л и ч а ю щ и йс я тем, чта, с целью повышения надежности уравновешивания пантографа, он снабжен регулировочным винтом, предназначенным для взаимодействия с чувствительным элементом редукционного клапана, и рычагами, один из которых одним концбм жестко смонтирован крышке силового цилиндра, а другой шарнирно установлен на поворотном корпусе, при этом другие концы рычагов шарнирно соединены между собой, а регулироврчный винт расположен в этом шарнире. кл с: 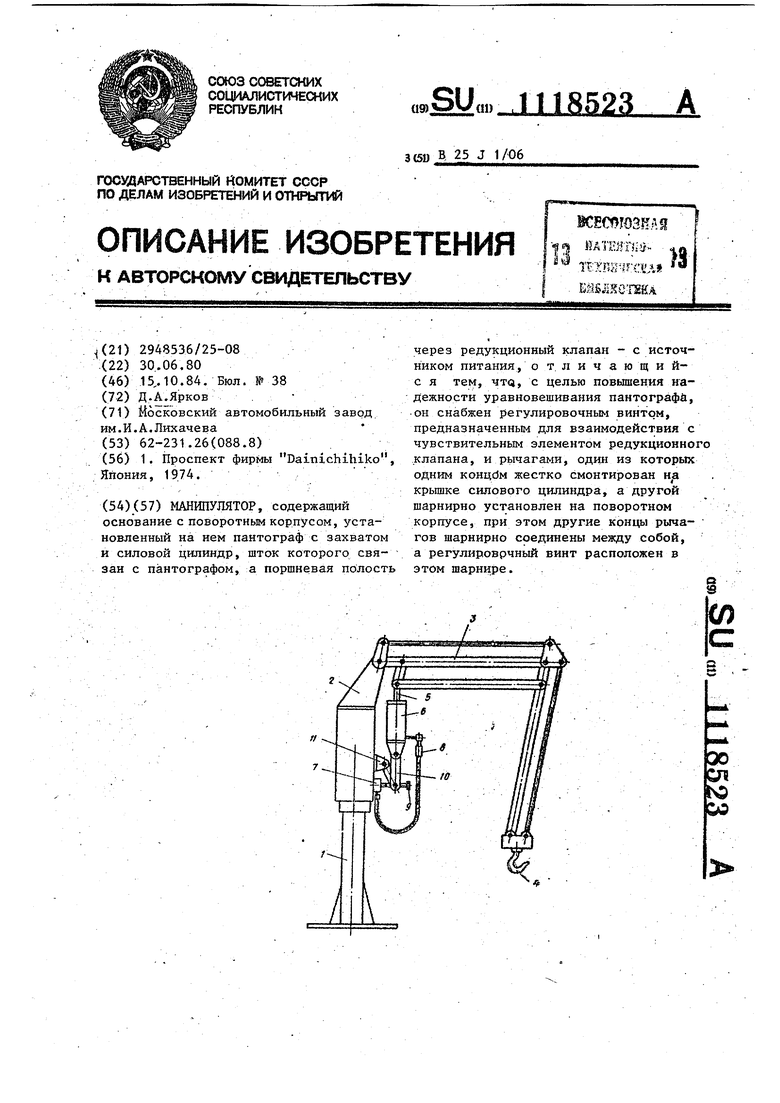
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект фирмы Dainichihiko, Япония, 1974. | |||
