Изобретение относится к машиностроению, например к промышленным роботам. Известен промышленный робот, содержащий пантограф, поворотную платформу и привод вертикального перемеш,ения 1. Недостаткам промышленного робота является повышенная мощность для вертикального перемешения пантографа и низкая точность позиционирования, так как при разном вылете руки резко меняются нагрузки на пантограф и привод. Целью изобретения является снижение мощности привода и повышение точности позиционирования, Эта цель достигается тем, что промышленный робот, содержащий пантограф, новоротную платформу и привод вертикального перемещения руки, снабжен гибким .элементом, противовесом и силовым гидроцилиндром, кинематически связанными между собой посредством дополнительно введенного копира, расположенного на нижней части противовеса, и посредством щтока силового гидроцилиндра, причем противовес соединен с пантографом гибким элементом, а привод вертикального перемещения выполнен в виде гидромотора, напорная магистраль которого гидравлически связана с штоковой полостью силового гидроцилиндра. Па чертеже изображен предлагаемый робот. Промыщленный робот включает в себя основание 1, поворотную платформу 2, на которой расположен кронштейн 3 оси пантографа руки манипулятора 4. К кронштейну 3 жестко закреплены рычаги 5 с подвижными блоками 6. Блоки 6 огибает стальной трос 7, один конец которого закреплен к рь1чагу пантографа манипулятора 4, а второй - шарнирно соединен с противовесом 8, с установленными в вертикальной плоскости опорами качения 9, расположенных в направляющих 10, жестко закрепленных к валу привода 11. С противовесом 8 жестко связан копир 12, имеющий фигурный паз 13, в котором перемещаются подшипниковые узлы 14, установленные на штоке 15 силового гидроцилиндра 16, шарнирно связанного с поворотной платформой 2. Гидроцилиндр 16 штоковой полостью через регулятор 17 давления с дросселем 18 и гидрораспределителем 19 соединен с напорной магистралью гидромотора 20, а поршневой полостью --- со сливной магистралью данного гидромотора. Работа промышленного робота осуществляется следующим образом. Приводной вал 11 может совершать горизонтальные перемещения - влево - вправо и вертикальные - вверх - вниз. При горизонтальном перемещении конечная точка руки манипулятора занимает исходное положение, точка руки манипулятора стремится занять положение максимального вылета, двигаясь строго горизонтально. При вертикальном движении приводного вала 11 конечная точка перемещается по вертикали, достигая при движении вниз приводного вала 11 максимальной величины, при движении вверх - минимальной. При движении приводного вала 11 в горизонтальной плоскости направляющими 10 определяется плечо положения противовеса 8 относительно вертикальной оси манипулятора, проходящей через ось крепления пантографа руки манипулятора 4 к поворотной платформе 2. Момент от массы противовеса 8 на данном плече равен моменту, создаваемому весом пантографа, руки мани пулятора 4 и схвата 21 относительно данной вертикальной оси. Длина троса 7, огибающего подвижные блоки 6, определяет вертикальное положение противовеса 8 в направляющих 10. А фигурный паз 13 через подщипниковые узлы 14, установленные на штоке 15 силового гидроцилиндра 16, определяет положение силового гидроцилиндра 16 в вертикальной плоскости. При движении приводнго вала 11 влево (вправо) рука манипулятора опускается (поднимается), а соответственно, изменяется и плечо противовеса 8, компенсируя момент от массы пантографа руки манипулятора 4 и охвата 21. При подъеме (опускании) приводного вала 11 противовес 8 поднимается (опускается) по направляющим 10, сохраняя уравновещивающий момент. Подщипниковые узлы 14, установленные на штоке 15 силового гидроцилиндра 16, перемещаются в фигурнОлМ пазе 13 копира 12, жестко закрепленного к противовесу 8 Сил1)Е«)й гидроцилиндр 16 занимает опре;u..R:jiHoe положение в зависимости от совершаемого движения, не нагружая руку манипулятора 4. В это время рука манипулятора 4 со схватом 21 уравновешивается противовесом 8. При взятии схватом 21 руки манипулятора груза заданной массы, в гидросистеме устанавливаетсяопределенное положение дросселя 18, регламентирующее расход жидкости, и заданное давление в напорной магистрали к гидроцилиндру 16. Давление в напорной магистрали гидромотора 20 изменяется пропорционально массе поднимаемого груза, а соответственно, противовес 8 нагружается дополнительным усилием, создаваемым силовым гидроцилиндром 16, в то время как гидрораспределитель 19 постоянно поддерживает гидроцилиндр 16 включенным в напорную магистраль. Таким образом, происходит уравновешивание моментов, создаваемых массой пантографов руки манипулятора 4 с схватом 21 и поднимаемым грузом. Изменение положения пантографов руки манипулятора 4 с схватом 21 и поднимаемого груза вызывает изменения положения центра тяжести манипулятора, а соответственно положение штока 15 силового гидроцилиндра 16. Так, например, при опускании руки манипулятора 4 происходит сброс жидкости через предохранительный клапан и регулятор 17 давления, при подъеме руки манипулятора 4 - подкачка жидкости в штоковую полость силового гидроцилиндра 16.
При завершении манипуляций с грузом происходит уменьшение давления в напорной магистрали гидромотора 20, а соответственно, снижение давления в гидроцилиндре 16, что обусловливает переход системы в режим работы без груза.
Предлагаемая конструкция позволяет снизить приводную мощность и повысить точность позиционирования.

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1983 |
|
SU1121134A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Манипулятор | 1980 |
|
SU872251A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Сверлильно-клепальная установка | 1988 |
|
SU1509167A1 |
| Манипулятор | 1979 |
|
SU829412A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| ПРИВОД ВРАЩЕНИЯ СЦЕНИЧЕСКОЙ ПОВОРОТНОЙ ПЛОЩАДКИ | 2003 |
|
RU2261312C2 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
ПРОМЫШЛЕННЫЙ РОБОТ, содержащий пантограф, поворотную платформу и привод вертикального перемещения руки, отличающийся тем, что, с целью снижения мощности привода и повыщения точности позиционирования, он снабжен гибким элементом, противовесом и силовым гидроцилиндром, кинематически связанными между собой посредством дополнительно введенного копира, расположенного на нижней части противовеса, и посредством щтока силового гидроцилиндра, причем противовес соединен с пантографом гибким элементом, а привод вертикального перемещения выполнен в виде гидромотора, напорная магист раль которого гидравлически связана с щтоковой полостью силового гидроцилиндра. (Л NS « а о: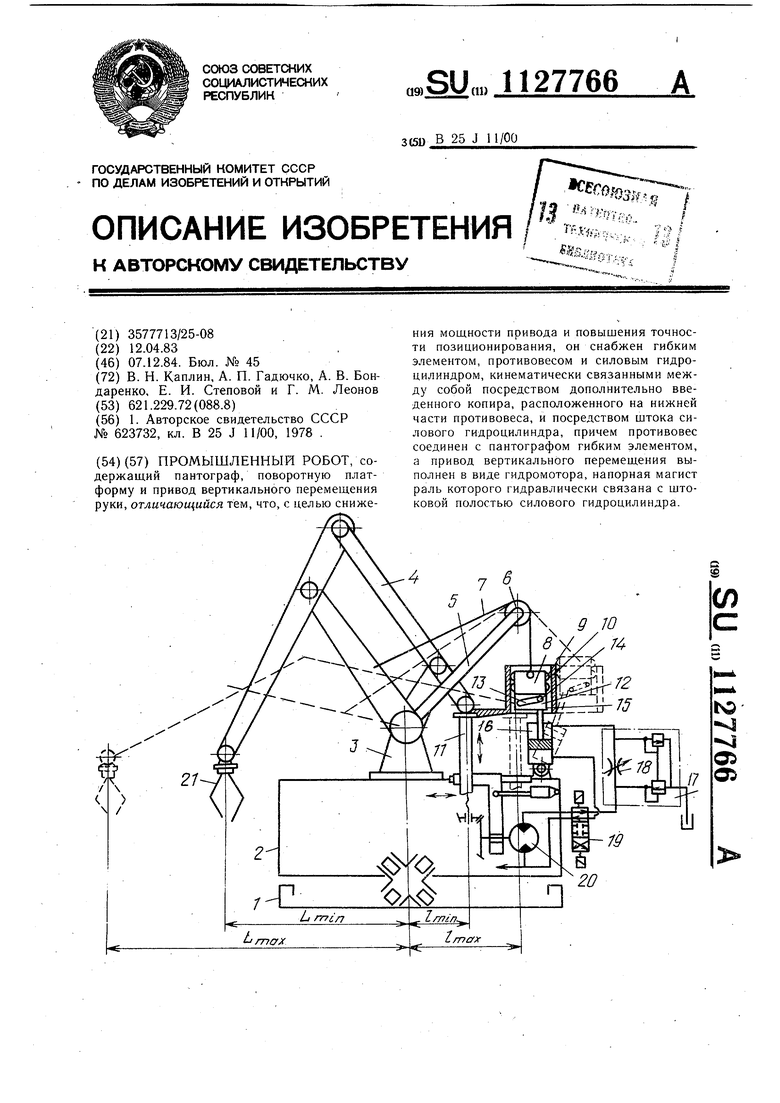
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1977 |
|
SU623732A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
