винтовых и цилиндрических передач и двух 30 °ДнонапРавл5нное
промежуточных валов 12 и 13 с зубчатыми цилиндрическими колесами 14-16.
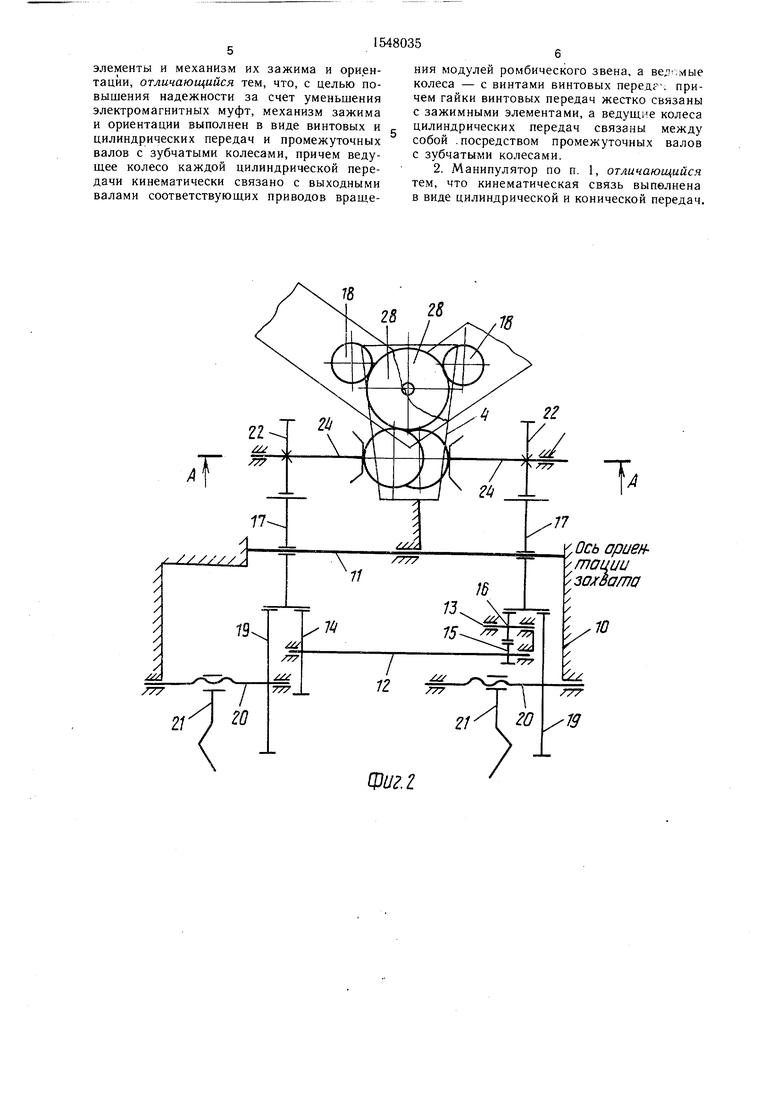
Ведущие зубчатые колеса 17 цилиндрических передач, установленные на оси 11, связаны между собой посредством промежуточКрутящий момент на винтах 20, обеспечивающий перемещение зажимных элементов, передается от двух приводов модулей через зубчатые колеса 18 выходных валов 9 и далее через цилиндрические и конические
ных валов 12 и 13 и цилиндрических зубча- 35 пеРеДачи а также цилиндрические зубчатые тых колес 14-16 и кинематически с соот- колеса 22 и 17 на винты 20, причем передаю- ветствующими выходными валами 9 приво- Щие направления вращения встречные, при дов вращения, на которых установлены зуб- этом промежуточные валы 12 и 13 свободно чатые колеса 18, а ведомые зубчатые коле- вращаются, са 19 цилиндрических передач жестко установлены на винтах 20 винтовых передач, гайки 21 которых жестко связаны с зажимными элементами.
Кинематическая связь каждого ведущего
40
зубчатого колеса 17 с зубчатым колесом 18
Ориентация захватного устройства 3 осуществляется вокруг оси 11 при передаче однонаправленного движения от соответствующих приводов модулей манипулятора, при этом промежуточные валы 12 и 13 превыходного вала 9 привода вращения моду- 45 ПЯТСТВУЮТ вращению ведущих зубчатых
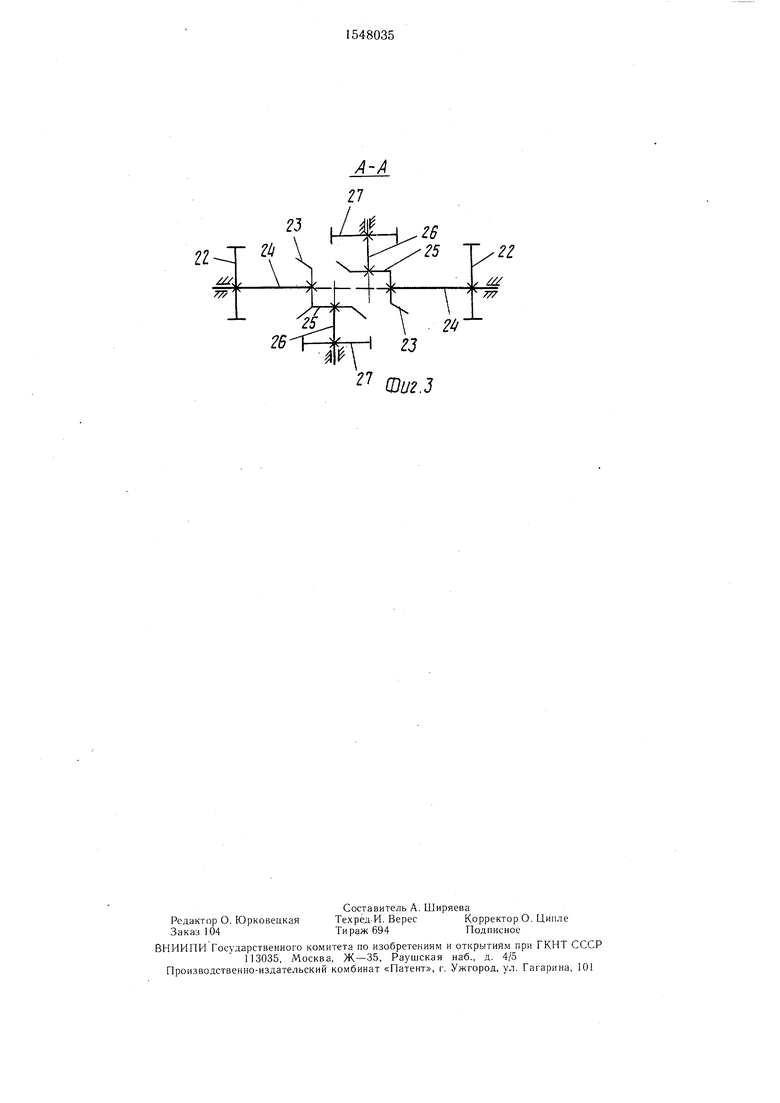
ля 7 ромбического звена 2 может быть выполнена в виде конической и цилиндрической передач и цилиндрических зубчатых колес 22 (фиг. 3), причем цилиндрические зубчатые колеса 22 установлены совместно с ведомыми зубчатыми колесами 23 кониче- 50 ских передач на соосных валах 24 и взаимодействуют с ведущими зубчатыми колесами 17 .цилиндрических передач механизма зажима и ориентации зажимных элементов, а каждое ведущее колесо 25 конической пеколес 17, и происходит вращение ведущих зубчатых колес 17 вместе с осью 11, в результате и осуществляется ориентация.
Формула изобретения
1. Манипулятор, содержащий основание, установленное на нем ромбическое звено, состоящее из четырех модулей в виДе полых элементов, в полости каждого из которых расположен механизм его перемещения,
редачи установлено на одном валу 26 с ведо-55 включающий два идентичных привода вра- мым колесом 27 цилиндрической передачи,щения, причем выходные валы приводов при этом ведущее колесо 28 связано с зуб-вращения смежных модулей соединены початым колесом 18 выходного вала 9 приводапаРно узлами сочленения, и захватное уст- вращения модуля 7.ройство, имеющее корпус, ось, зажимные
°ДнонапРавл5нное
Крутящий момент на винтах 20, обеспечивающий перемещение зажимных элементов, передается от двух приводов модулей через зубчатые колеса 18 выходных валов 9 и далее через цилиндрические и конические
пеРеДачи а также цилиндрические зубчатые колеса 22 и 17 на винты 20, причем передаю- Щие направления вращения встречные, при этом промежуточные валы 12 и 13 свободно вращаются,
Ориентация захватного устройства 3 осуществляется вокруг оси 11 при передаче однонаправленного движения от соответствующих приводов модулей манипулятора, при этом промежуточные валы 12 и 13 пре ПЯТСТВУЮТ вращению ведущих зубчатых
колес 17, и происходит вращение ведущих зубчатых колес 17 вместе с осью 11, в результате и осуществляется ориентация.
Формула изобретения
1. Манипулятор, содержащий основание, установленное на нем ромбическое звено, состоящее из четырех модулей в виДе полых элементов, в полости каждого из которых расположен механизм его перемещения,
включающий два идентичных привода вра- щения, причем выходные валы приводов вращения смежных модулей соединены попаРно узлами сочленения, и захватное уст- ройство, имеющее корпус, ось, зажимные
элементы и механизм их зажима и ориентации, отличающийся тем, что, с целью повышения надежности за счет уменьшения электромагнитных муфт, механизм зажима и ориентации выполнен в виде винтовых и цилиндрических передач и промежуточных валов с зубчатыми колесами, причем ведущее колесо каждой цилиндрической передачи кинематически связано с выходными валами соответствующих приводов вращения модулей ромбического звена, а вел мые колеса - с винтами винтовых пере п.ч причем гайки винтовых передач жестко связаны с зажимными элементами, а ведущие колеса цилиндрических передач связаны между собой посредством промежуточных валов с зубчатыми колесами.
2. Манипулятор по п 1, отличающийся тем, что кинематическая связь выполнена в виде цилиндрической и конической передач.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1197833A1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Манипулятор | 1986 |
|
SU1393620A1 |
| Захватное устройство | 1986 |
|
SU1323371A1 |
| Дифференциальный манипулятор | 1983 |
|
SU1119838A1 |
| Захватное устройство манипулятора | 2018 |
|
RU2700348C1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
Изобретение относится к машиностроению, а именно к промышленным роботам, предназначенным для автоматизации тяжелых и монотонных работ. Целью изобретения является повышение надежности за счет уменьшения электрических муфт. В зависимости от направлений вращения выходных валов 9 приводов вращения смежных модулей 7 ромбического звена 2 обеспечиваются как перемещение зажимных элементов захвата, так и его ориентация. Так, при встречном режиме вращения выходных валов 9 осуществляется перемещение зажимных элементов посредством цилиндрических, конической и винтовой передач, причем промежуточные валы механизма зажима и ориентации зажимных элементов свободно вращаются. При передаче однонаправленного движения от выходных валов 9 приводов вращения модулей осуществляется ориентация захвата, при этом промежуточные валы препятствуют вращению ведущих зубчатых колес и осуществляется вращение оси 11 захватного устройства 3. 1 з.п. ф-лы, 3 ил.
777
Ось ариензахва/па
19
Фиг. г
Юиг.З
| Манипулятор | 1984 |
|
SU1197833A1 |
