Изобретение относится к машиностроению, а именно к промышленным роботам, манипуляторам.
Известен схват промышленного робота, содержащий корпус, губки, зажимные кулачки. Каждый кулачок соединен со своим гидроцилиндром 1.
Однако данны схват характеризуется низкой надежностью из-за отсутствия предохранительной аппаратуры в напорной магистрали гидроцилиндров, причем форма и размеры губок предназначены для конкретного типа и размера детали.
Целью изобретения является расширение технологических возможностей и повышение надежности захвата детали.
Цель достигается тем, что схват промышленного робота, содержащий корпус с зажимными губками и приводными гидроцилиндрами, снабжен ходовыми винтами, гидрозамками, а также продольными и поперечными направляющими, причем зажимные губки соединены со штоками гидроцилиндров посредством дополнительно введенных шарниров и пружин и кинематически связаны с ходовыми винтами, а гидроцилиндры гидравлически связаны между собой последовательно посредством гидрозамков.
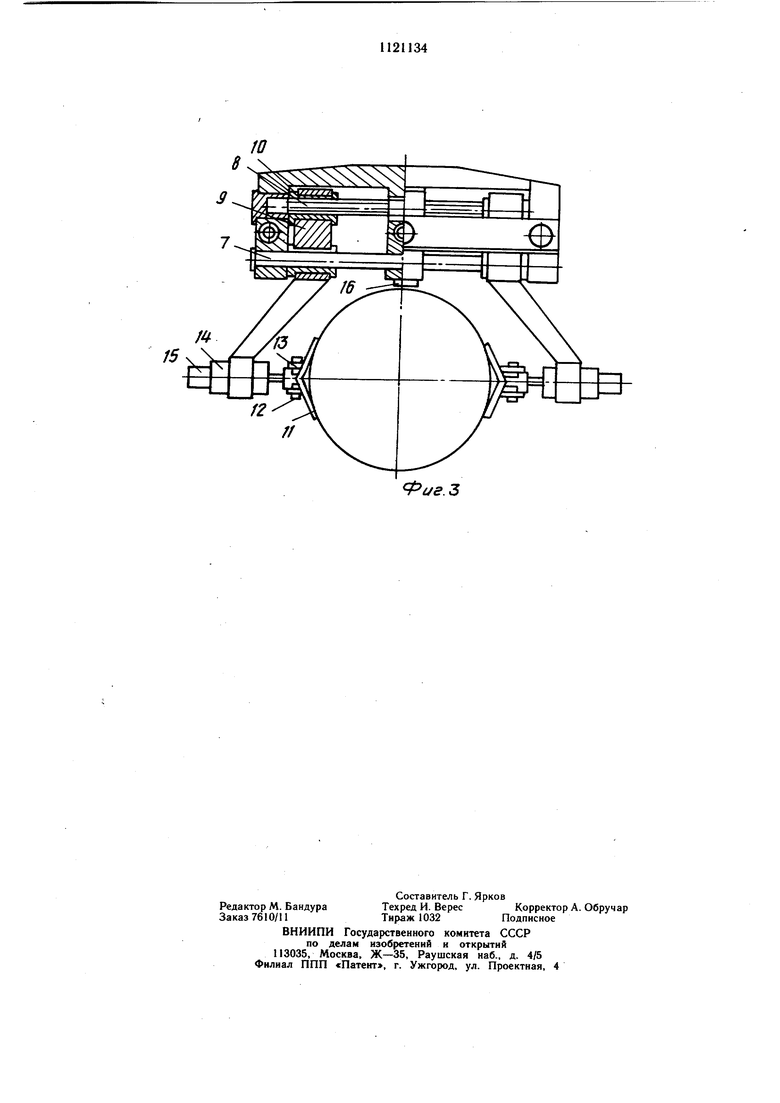
На фиг. 1 изображен предлагаемый схват, общий вид; на фиг. 2 - гидравлическая схема схвата; на фиг. 3 - схват, вид сбоку.
Схват промышленного робота состоит из корпуса 1, продольных направляющих 2, продольного ходового винта 3, ползунов
4, промежуточных опор 5 с гайками 6, поперечных направляющих 7, поперечных ходовых винтов 8, кронштейнов 9 с гайками 10, губок 11 схвата, закрепленных посредством цилиндрических шарниров 12 и пружин 13 на штоках гидроцилиндров 14, со встроенными гидрозамками 15, матриц телеобъектива 16 и гидрораспределителя 17. Схват работает следующим образом. При появлении детали в поле зрения
0 телеобъектива 16 определяются размеры и форма детали, в соответствие с которыми ползуны 4 перемещаются по продольным направляющим 2 при помощи продольного ходового винта 3 и гаек 6 на расстояние, 5 необходимое для взятия детали данной длины, а кронштейны 9, перемещающиеся по поперечным направляющим 7 при помощи поперечных ходовых винтов 8 и гаек 10, устанавливаются пропорционально сигналу телеобъектива 16. Гидрораспределитель 17 0 соединяет гидроцилиндры 14 через гидрозамки 15 с напорной магистралью гидросистемы робота, происходит сжатие детали. Для освобождения детали от захвата гидрораспределитель 17 соединяет напорную 5 магистраль робота с контуром управления гидрозамками 15, а полость гидроцилиндров 14 со сливной магистралью. Рабочая жидкость под действием возвратных пружин гидроцилиндров 14 перетекает в сливную магистраль и деталь освобождается от захвата.
Предложенный схват манипулятора позволит надежно зажимать детали различной конфигурации в руке робота или манипулятора.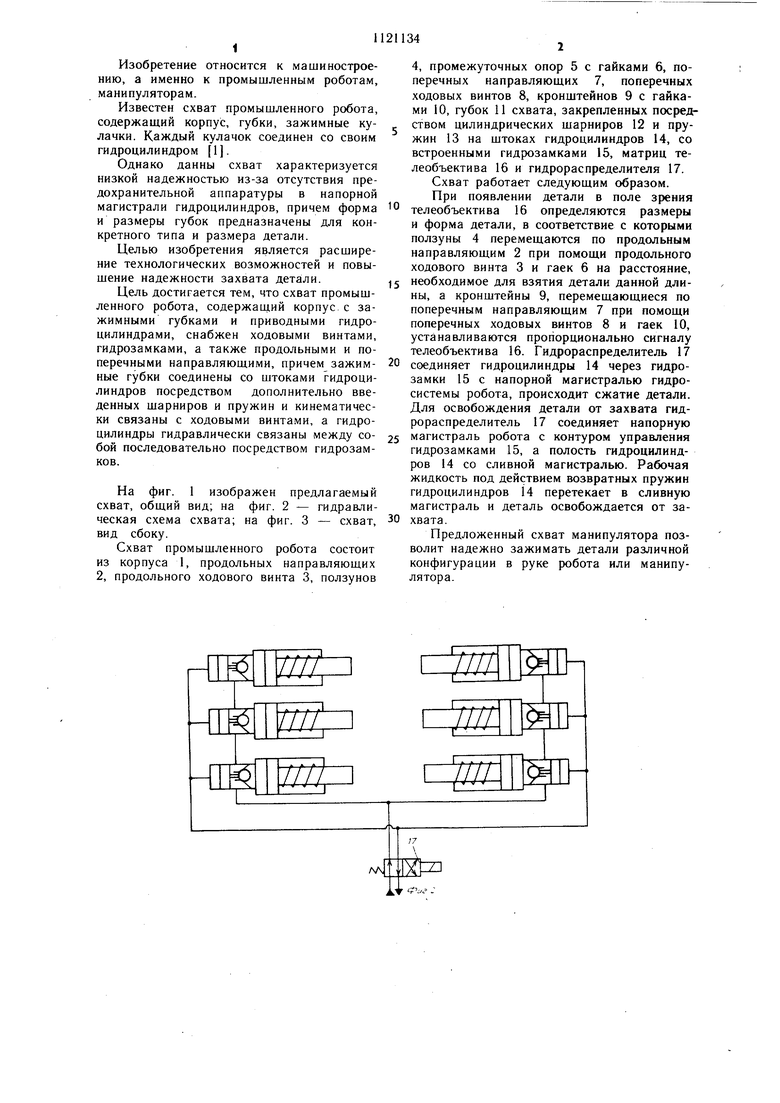
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват | 1982 |
|
SU1060469A1 |
| Захват манипулятора | 1979 |
|
SU844262A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Захватное устройство | 1987 |
|
SU1465312A1 |
| Промышленный робот | 1983 |
|
SU1127766A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
СХВАТ ПРОМЫШЛЕННОГО РОБОТА, содержащий корпус с зажимными губками и приводными гидроцилиндрами, отличающийся тем, что, с целью расширения технологических возможностей и повышения надежности захвата детали, он снабжен ходовыми винтами, гидрозамками, а также продольными и поперечными направляющими, причем зажимные губки соединены со штоками гидроцнлиндров посредством дополнительно введенных шарниров и пружин и кинематически связаны с ходовыми винтами, а гидроцилиндры гидравлически связаны между собой последовательно посредством гидрозамков. S (Л ьо 00 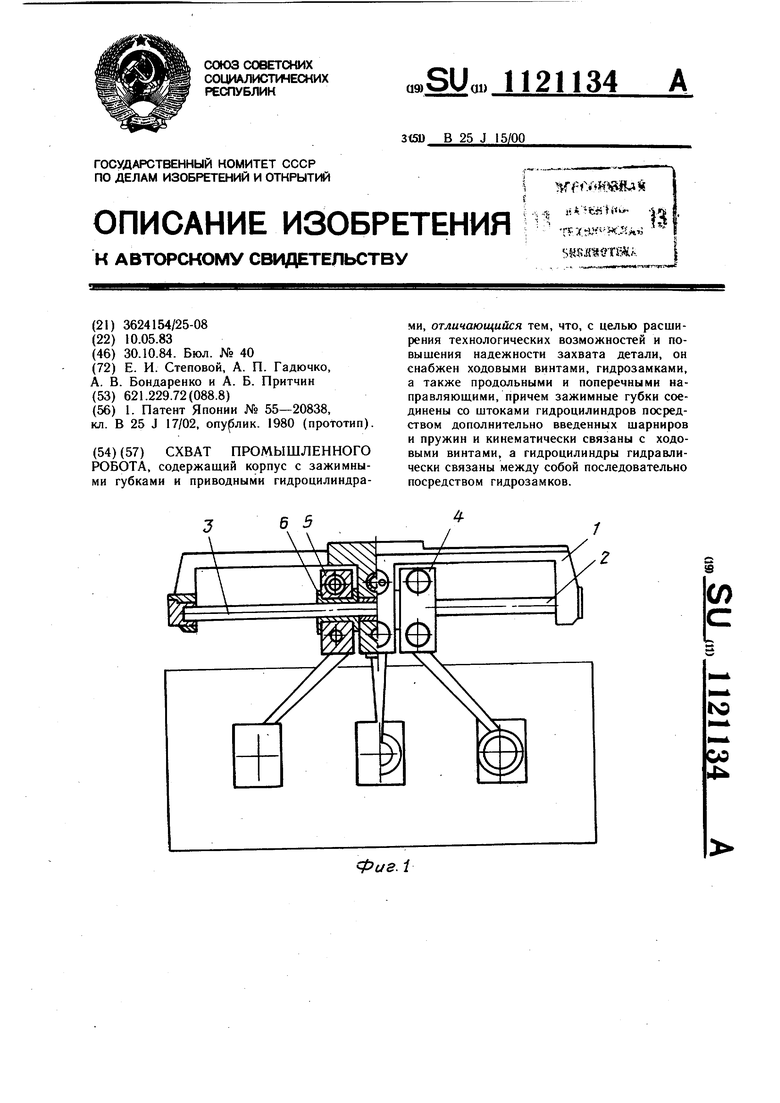
tZ
8
tje.Z
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
