(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1979 |
|
SU918085A2 |
| ГИДРОЦИЛИНДР ДВОЙНОГО ДЕЙСТВИЯ | 1991 |
|
RU2022732C1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ И ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1995 |
|
RU2092717C1 |
| Система автоматической коррекции положения и траектории движения копировального суппорта | 1975 |
|
SU543497A1 |
| МАШИНА ДЛЯ КОНТАКТНОЙ СТЫКОВОЙ СВАРКИ РЕЛЬСОВ | 1998 |
|
RU2186664C2 |
| ГИДРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЗАЖИМАДЕТАЛЕЙ | 1972 |
|
SU344956A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Следящий привод нажимного органа гибочного пресса | 1955 |
|
SU115584A1 |
| Гидравлический привод каретки металлорежущего станка | 1977 |
|
SU631304A1 |
Р1зобретение относится к захватным устройствам руки промышленного робота или манипулятора и может быть использовано в машиностроении.
Известны механические захваты, где в ;ачестве приводов используются гидро- и иневмоиилиидры, штоки которых через систему рычагов или других механизмов приводят схваты в действие 1. Обежим недостатком известных механических захватов является отсутствие самоориентирования зажимных элементов, что снилсает технические возможности роботов, манипуляторов, так как требует установки устройств позиционирования руки.
Известен также захват манипулятора, одним из звеньев которого является шток поршня исполнительного гидроцилиндра. Шток сводит или разводит концы рычагов симметричного действия, с помощью которых осушествляется зажим деталей. В качестве иередаточного механизма датчиков обратной связи в основном применяются цилиндрические и реечные зубчатые механизмы 2.
Прн несимметричном расположении относительно зажимных элементов возможен неправильный захват, перекос детали или незахват ее. Кроме того, приводной механизм не позволяет осуш ествить точную остановку залсимных элементов захвата относительно детали. Эти недостатки ликвидируются при помощи сложных систем позиционирования руки робота или манипулятора, что усложняет всю их систему.
Целью изобретения является повышение точности иознционирования захватных элементов относительно детали за счет создания независимости движения зажимных элементов захвата.
Поставленная цель достигается за счет того, что зажимные губки снабжены следящими золотниками, плунжеры которых вынолнены с щупами, причем зажимные губки жестко соединены со следящими золотниками, соединенными через систему рычагов с гидроцилиндрами, которые через реверсивный золотник соединены с гидронасосом.
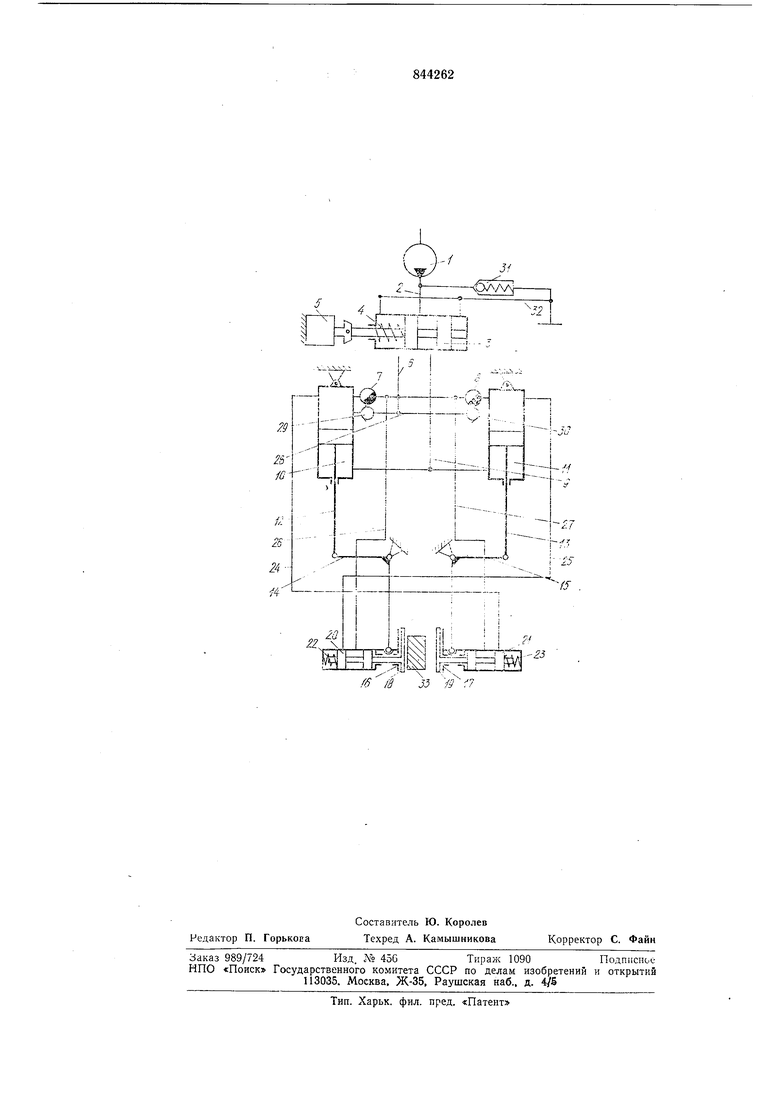
На чертеже изображена принципиальная гндросхема захвата манипулятора.
Захват состоит из гидронасоса /, соединенного трубопроводом 2 с реверсивным золотником 5, щток которого подпружинен иружиной 4 возврата и соединен с управляющим электромагнитом 5. Реверсивный золотник 3 соединен трубопроводом 6 с дросселями 7 и S и трубопроводом 9 с гидродвигателями 10 и 11. Штоки 12 и 13 гидродвигателей 10 и 11 через рычаги 14 и 15
3
соединены с самоустйнавливающнмнся губками 16 и 17 зажимных элементов, перед которыми расположены щупы 18 и 19, закрепленные на плунл ерах следящих золотников 20 и 21 с пружинами 22 и 23 возврата. Гидродвигатели 10 и // соединены трубопроводами 24, 25 со следящими золотниками 20 и 2J, которые трубоироводами 26, 27 соединены с трубопроводом 6. Гидродвигатели Юн 11 соединены дополнительно трубопроводом 28 с обратными клапанами 29 и 30 с трубопроводом 6. Гидросистема снабжена лредохраздительными клапанами 31 и трубопроводом 32 слива.
Работа захвата происходит следующим образом. С гидронасоса 1 жидкость поступает по трубопроводу 2 в реверсивный золотник 3. При запитывании электромагнита 5 плунжер реверсивного золотника 3 сдвигается влево и жидкость поступает по трубопроводу 6 к дросселям 7 и 8 и далее в гидродвигатели 10 и 11, приводя в движение поршни со штоками J2 и J3. Штоки /2, 13 через рычаги 14 и 15 сближают зажимные губки 16 и 17 и щупы 18 и 19. Деталь заячимается независимо от еэ расиоложения относительно зажимных губок. Нагфимер при соприкосновении щупа 18 с зажимаемой деталью 33 он утапливается и перемещает плунжер следящего золотника 20 влево, жидкость с трубопровода 6 начинает поступать по трубопроводу 26 через золотник 20, далее по трубопроводу 25 в гидродвигатель 11, который сообщает дополнительное движение штоку 13, а следовательно, зажимной губке ,17 через рычаг 15. При соприкосновении щупа 19 плунжер золотника 21 смещается вправо и жидкость с трубопровода 6 через трубопровод 27, золотник 21 и трубопровод 24 поступает в гидродвигатель 10. В этом случае зажимные губки 16 и 17 одновременно производят зажим детали 33. Жидкость, находящаяся в гидродвигателях 10 м 11 при поступательном движении штоков, поступает по трубопроводу 9 через золотник 3 по трубопроводу 32 на слив. При зажиме детали гидронасос / производит подачу жидкости через предохранительный клапан 31 на слив. При необходимости режима детали 33 электромагнит 5 обесточивается н пружина 4 смещает плунжер реверсивного золотника 3 вправо, тогда л идкость от гидронасоса / по трубопроводу .2 поступает в трубопровод 9 и далее к гидродвигателям 10 н //, поршни которых смещаются и приводят в движе1П1е в обратном направлении штоки 12 и 13, а следовательно, и рычаги 15 и 14, производя отвод губок 16 и 17 от детали 33. При разжиме детали 33 щупы 18, 19 иод действием пружин 22 и 23 следящ 1л золотников 20 и 21 возвращаются в исходное положение. При разжиме жидкость поступает из гидродвигателей 10, 11 по трубопроводу 28 через обратные клапаны 29, 30 и по трубопроводу 6 через золотник 3 и далее по трубопроводу 32 на слив.
Использование предлагаемого захвата манипулятора позволяет повысить надежность схватывания детали, упрощается конструкния манипулятора за счет упрощения системы точного позиционирования руки
относительно детали. Надежность схватывания проявляется в том, что губка, которая первая вощла в сонрикосновение с деталью, остановится и не будет оказывать сильного воздействия до тех пор, пока вторая губка не соприкоснется с деталью, после чего деталь зал имается двумя губками. Благодаря такому механизму захвата нет 1еобходпмости точно нозиционировать захват манипулятора относительно детали.
Формула изобретения
Захват манипулятора, содерл :ащий питаемые от гидронасоса гидроцилиндры, связанные с зажимными губками, систему напорных и сливных магистралей, отличающ и и с я тем, что, с целью повыщения точности схватывания и позиционирования, он снабл ен реверсивным золотником и следящими золотниками, плунжеры которых выполпены с щупами, причем зажимные губки жестко соединены со следящими золотниками, соединенными системой рычагов с гидроцилиндрами, сообщенными с гидронасосом через реверсивный золотник.
Источники информации, принятые во внимание при экспертизе:
S
Jv- v---- i-H i-I
fH .bd
.
ra-r-r--0Г
/
