Изобретение относится к области автоматизации горного оборудования и может быть применено для программного управления движением поворотной платфор.мы экскаватора. Для работы автоматического устройства управления необходимо иметь информацию об угловом отклонении ковша экскаватора относительно вертикальной плоскости. Однако устройства аналогичного назначения не известны.
В предлагаемом устройстве информация об угле отклонения получена за счет того, что в нем выходы датчиков тока якорной цепи, ускорения поворотной платформы и датчика знака скорости врапдения поворотной платформы и датчика знака скорости вращения поворотной платформы включены на вход сумматора, соединенного своим выходом со входом блока деления, второй вход которого соединен с устройством, формирующим функцию, которая зависит от характера движения ковща, причем выход блока деления соединен со вторичным прибором.
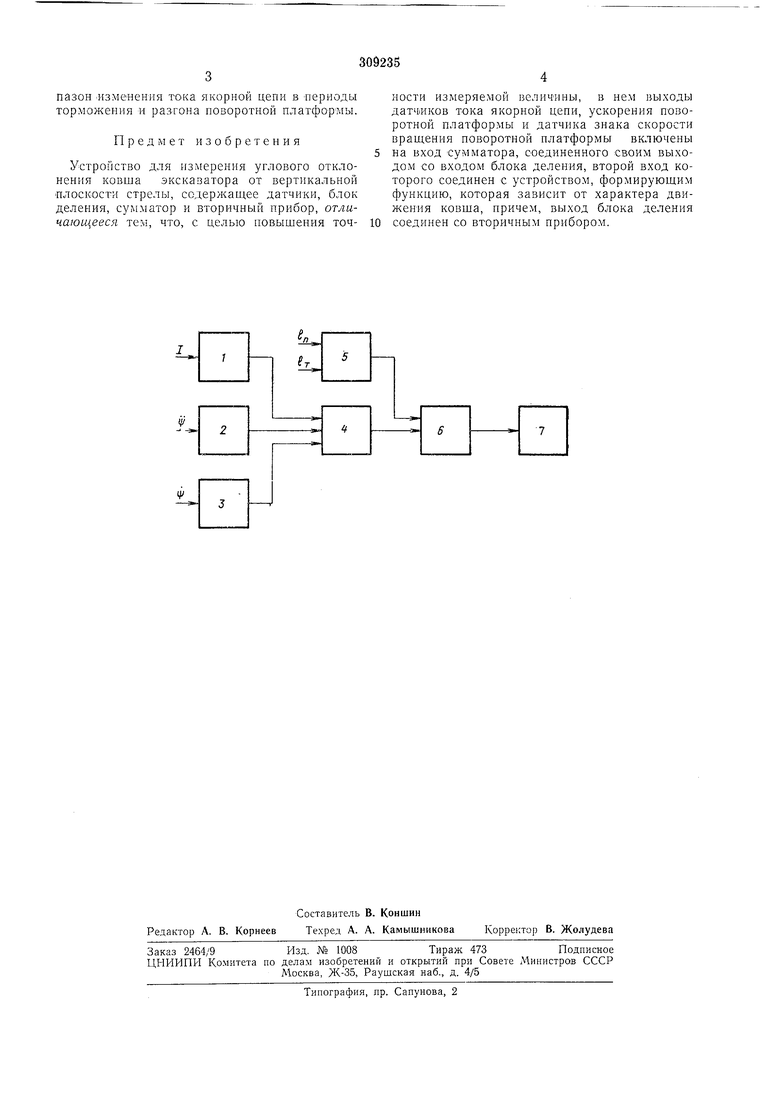
На чертеже «оказана блок-схема предлагаемого устройства.
Устройство состоит из трех датчиков /-3, на которые соответственно поступают сигналы, пропорциональные току / в обмотке якорной цепи двигателя, скорости и ускорению вращения поворотной платформы. Блок 4 выполняет функцию алгебраического суммирования. С
блока 5 на блок 6, реализующий операцию деления, помимо основного сигнала с блока 4, поступает напряжение, пропорциональное величине, зависящей от геометрических параметров ковща. Блок 5, входными параметрами которого являются длины подъемного и тягового канатов /п, /т, служит для формирования функции, зависящей от траекторного движения ковща.
Искомый параметр, т. е. угловое отклонение ковща от вертикальной плоскости стрелы драглайна, снимается с выхода блока 6 в виде напряжения постоянного тока, которое измеряется вторичным прибором 7.
Многоконтурный автоматизированный электропривод современных мощных экскаваторов позволяет осуществить поворот с жесткой
трапецеидальной характеристикой скорости г|з, в силу чего - непрерывная кусочно-линейная функция времени, а интенсивность изменения скорости поворота драглайна i|; - кусочно-постоянная известная функция времени.
Задающее воздействие (ампер-витки) на 5 привод поворотной платформы драглайна имеет вид линейно-растущего сигнала, величина которого ограничена допустимым значением ускорения поворотной платформы. При этом величина динамического момента должна быть 0 меньще стопорного момента, т. е. имеется диапазон Изменения якорной цепи в периоды тормон ения и разгона поворотной платфор мы.
Предмет изобретения
Устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости стрелы, содержащее датчики, блок деления, сумматор и вторичный прибор, отличающееся тем, что, с целью повышения точности измеряемой величины, в нем выходы датчиков тока якорной цепи, ускорения поворотной платформы и датчика знака скорости вращения поворотной платформы включены
на вход сумматора, соединенного своим выходом со входом блока деления, второй вход которого соединен с устройством, формирующим функцию, которая зависит от характера движения ковша, причем, выход блока деления
соединен со вторичным прибором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости | 1983 |
|
SU1121357A1 |
| Устройство для управления механизмом поворота драглайна | 1986 |
|
SU1384682A1 |
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛОВОГО | 1973 |
|
SU375351A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Устройство для управления электроприводом поворота экскаватора-драглайна | 1981 |
|
SU972009A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| Устройство для управления приводом механизма поворота экскаватора-драглаина | 1978 |
|
SU905382A1 |
