1
Изобретение лредназначепо для автоматизации экскаваторов-драглайнов.
Известны устройства для измерения угловых отклонений ковша, содержащие измеритель отклопения подъемного каната от плоскости шкива и измеритель отклонения точки схода подъемного каната со шкива от горизонтального уровня. Однако эти устройства не измеряют относительный угол перемещения ковша в горизонтальной плоскости.
Целью изобретения является измерение относительного угла перемещения ковша в гор,изоптальпой плоскости.
Это достигается тем, что устройство выполнено с соединенным с осью лебедки подъема стрелы измерителем-преобразователем наклона стрелы, один вход которого подключен к измерителю-преобразователю отклонения точки схода подъемного каната со шкивл от горизонтального уровня, другой - к из :epителю-преобразователю наклона оси шкивов, а выход измерителя-преобразователя нг.ллона стрелы подсоединен к механически связанному с осью вала лебедки подъемного каната измерителю-вычислителю проекции расстояния от iKOBUia до оси вращения экскаватора па вертикальную плоскость стрелы, к выходу которого подключеп одним из входов блок определения угла отклонения ковша в горизонтальной плоскости, па другой вход которого
включен механически соединенный с осью вала подъемного каната измеритель-вычислитель прое.кции расстояния от ковща до оси вращеиия на вертикалы ую плоскость, перпендикулярную к вертикальной плоскости стрелы, входом соединенны с выходом измерителя-преобразователя наклона оси шкивов. Выходы измерителя-преобразователя отклоиепия подъемного каната от плоскости щкива соединены соответственно с одним из входов измерителя-преобразователя наклона оси шкивов и с из входов измерителяпреобразователя отклонения точки схода подъемного каната со шкива от горизоитального уровня, другой вход которого соединен с выходом измерителя-преобразователя наклона оси шкивов.
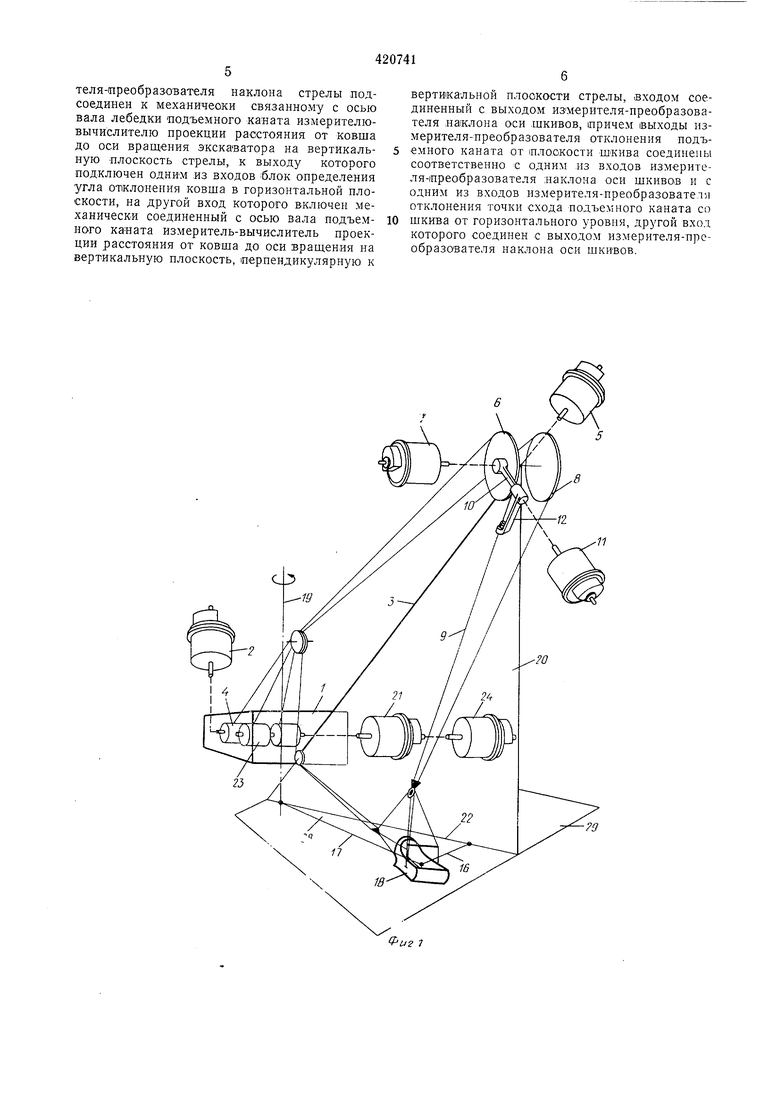
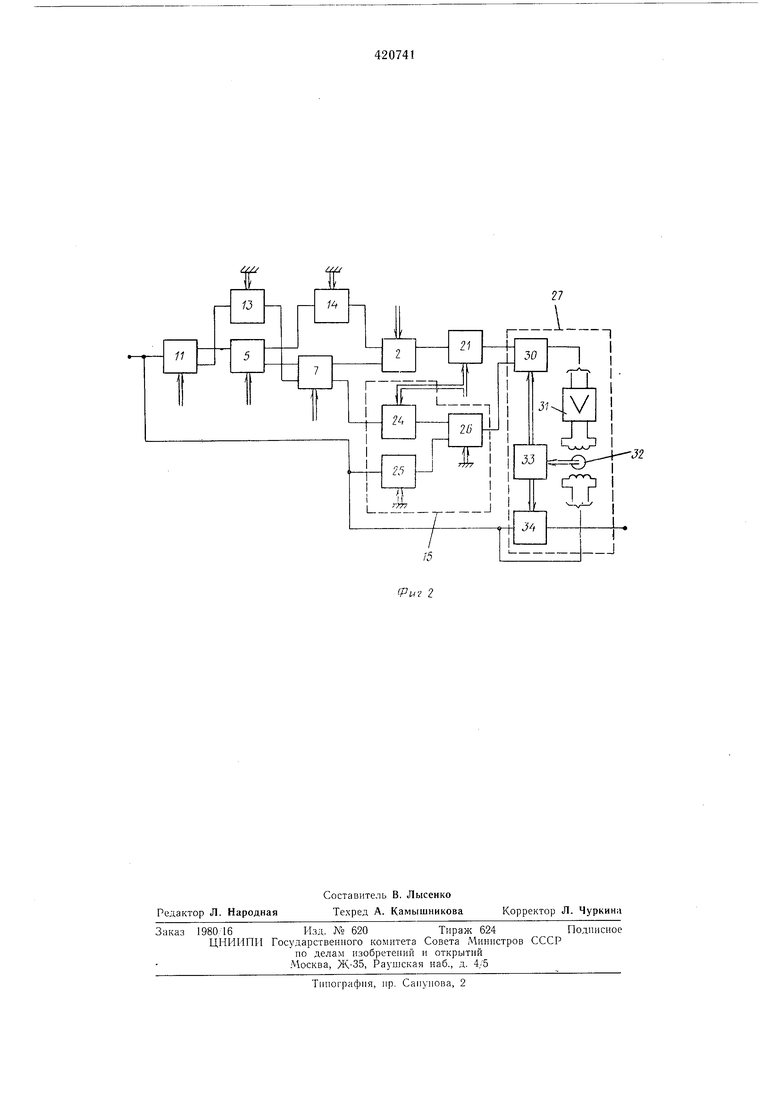
На фпг. 1 изображен предлагаемый экскаватор-драглапп ,и основные Измерительно-преобразуюш-ие элементы; на фиг. 2 - принципиальная схема соединепня измерительно-преобразующ.их элеме1птов.
Экскаватор-драглайн I содержит измеритель - преобразователь 2 наклона стрелы 3,
установленный, например, на валу лебедки 4 подъема стрелы 3, измеритель-преобразователь-преобразователь 2 наклона стрелы 3, оси вращення HIKHBO.B 6, измеритель-преобразователь 7 отклонения точки схода 8 подъемного каната 9 со шкива, 6, установленпый Ia
оси вращения рычага 10, измеритель-преобразователь 11 огклоиеиия подъемного каната 9 от плоскости шкива 6, размещенный на оси вращения рычага 12. Измерители 2, 5, 7 и II выполнены в виде синусно-косинусных врандающихся трансформаторов.
Один из выходов измерителя-преобразователя i 1 соединен со входом измерителя-преобразОВателя 5, а другой - с одним из входов измерителя- преобразователя 7 через масщтабный вращающийся трансформатор 13. Один из выходов измерителя-преобразователя 5 -соединен ,с другим входом измерителяпреобразователя 7, другой же его выход - с одни из входов измерителя-преобразователя 2 через масщтабный вращающийся трансформатор 14.
Один из выходов измерителя-преобразователя 7 электрически связав с другим входом измерителя-преобразователя 2, другой же его выход - со входоМ измерителя-вычислителя 15 проекции 16 расстояния 17 от ковща 18 до оси 19 вращения экскаватора 1 на вертикальную плоскость, перпендикулярную к вертикальной плоскости 20 стрелы 3. Выход измерителя-преобразователя 2 соединен со входом измерителя - вычислителя 21 проекции 22 расстояния 17 от ковша 18 до оси 19 вращения экскаватора 1 на вертикальную плоскость 20 стрелы 3.
Измеритель-вычислитель 21 выполнен в виде линейного вращающегося трансформатора, вал которого механически связан с валом лебедки 23 подъемного механизма.
Измеритель-вычислитель 15 содержит линейный вращающийся трансформатор 24, механический вход которого связан с валом лебедки 23 подъемного механизма, а электрический - с выходом измерителя-преобразователя 7, масщтабный вращающийся трансформатор 25 и синусно-косинусный вращающийся трансформатор 26, входы которого соединены с выходами трансформаторов 24 ,и 25 соот ветсрвенно.
Выходы измерителей-вычислителей 21 и 15 соединены со входами -блока 27 определения угла 28 отклонепия ковща 18 в горизонтальной 29 плоскости.
Блок 27 содержит синусно-косинусный вращающийся трансфор.матор 30, электрическими входами соединенный с выходами измерителей-вычислителей 21 и 15 соответственно, усилитель 31, входом соединенный с выходом трансформатора 30, двигатель 32, обмотка управления которого подключена к выходу усил,ителя 31, редуктор 33, механически связанный с валом двигателя 32 и валоМ трансформатора 30, линейный вращающийся трарнсформатор 34, .вал которого также связан с редуктором 33.
Во время работы экскаватора бифилярно подвещенный ковщ 18 колеблется, увлекая подъемные канаты 9 от (плоскости 20, при этом ось шкивов 6 поворачива-ется относительно оси, жестко связаниой с осью стрелы
3, наклон которой измеряется измерителемпреобразователем 2. Кроме того, перемещается точка 8 схода каната 9 со щкива 6.
Все эти угловые отклонения измеряются и преобразую1ся соответствующиМи прибора.ми 2, 5, 7 и П. Масштабные вращающиеся трансформаторы 13 и 14 используются для согласования сигналов и не являются обязательными элемента-ми.
Выходные сигналы измерителя-преобразователя пропорциональны координатам единичного вектора, параллельного направлению подъем ных канатов. Измерители-преобразоват-ели 5, 7 и 2 осуществляют последовательные ортогональные преобразования этих координат. Входной сигнал преобразователя 2 умножается в измерителе-вычислителе па сигнал, пропорциональный длине подъемного каната 9 от точки схода 8 до ковща 18.
Аналогично сигнал с измерителя-преобразо1вателя перемножается на линейном вращающемся трансформаторе 24 с сигналом, пропорциональным длине подъемного каната 9 от
точки схода 8 до ковша 18. Выходные сигналы трансформаторов 24 и 25 суммируются на трансформаторе 26, выходной сигнал которого пропорционален величине проекции 22. Выходной сигнал из-.мерителя-вычислителя
21 пропорционален величине проекции 16.
Выходные сигналы измерителей-вычислителей 21 и 15 являются декартовыми координатами вектора, аргумент которого в полярных координатах является искомым углом 28.
Выходной сигнал трансформатора 30 пропорционален синусу разности между величинами искомого угла 28 и угла поворота входного вала трансформатора 30. С помощью усилителя 31, двигателя 32 и редуктора 33
осуществляется отработка до нуля этой разности, в результате чего на выходе трансформатора 34 образуется сигнал, пропорциональный величине искомого угла 28.
Предмет изобретения
Устройство для определения угла отклонения ковша экскаватора-драглайна, включающее лебедку подъема стрелы и лебедку подъемного каната, измеритель-преобразователь отклонения подъемного каната от плоскости щкива, измеритель-преобразователь отклонения точки схода подъемного каната со щкива от горизонтального уровня ,и из-мер.итель-преобр азователь наклона оси щкивов, отличающееся тем, что, с целью измерения относительного угла перемещения ковша в горизонтальной плоскости, оно выполнено с соединенным с осью лебедки подъема стрелы измерителем-преобразователем наклона стрелы, один вход которого подключен к измерителю-преобразователю отклонения точки схода подъемного каната со шкива от горизонтального уровня, другой - к из мерителю-преобразователю наклона оси шкивов, а выход измерителя-преобразователя наклона стрелы подсоединен к механически связанному с осью вала лебедки подъемного каната измерителювычислителю проекции расстояния от ковша до оси вращения экскаватора на вертикальную плоскость стрелы, к выходу которого подключен одним ,из входов блок определения угла отклонения ковша в горизонтальной плоскости, на другой вход которого включен механически соединенный с осью вала подъемного каната измеритель-вычислитель проекции расстояния от ковша до оси враш,ения на вертикальную плоскость, перпендикулярную к
вертикальной плоскости стрелы, входом соединенный с выходом измерителя-иреобразователя наклона оси шкивов, причем выходы измерителя-преобразователя отклонения подъемного каната от плоскости Шкнва соединены соответственно с одним из входов измерителя-преобразователя наклона оси шкивов и с одним из входов измерителя-преобразователя отклонения точки схода подъемного каната со шкива от горизонтального уровня, другой вход которого соединен с выходом измерителя-преобразователя наклона оси шкивов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения угла откоса предотвала | 1980 |
|
SU939656A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Рабочее оборудование экскаватора-драглайна | 1982 |
|
SU1116124A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
| ЭКСКАВАТОР-ДРАГЛАЙНI 2LQEC111ШШ-'^ЮЗНАЯ^'^лНй^1ЕСКА1 | 1972 |
|
SU338595A1 |
9
Ц2 7
